1
Изобретение предназначено для исяользо- вания его в системе автоматического управления, например, для автоматического регу лирования гидротурбин.
Известны следящие системы с несконьки ми электрическими воздействиями, rcoife pscaщие электрический сумматор l.
Недостатком данных систем: является использование воздействий одного рода, что сужает область их применения.
Наиболее близкой к изобретеншо по технической сущности является следящая система, содержащая гидромеханический сумматор, одно из встречно направленных сопел которого соединено со струйным усилителем, а другое - с выходными каналами, гидравлического и механического воздействия, сопло питания гидромеханического сумматора соединено с каналом питания струйного усилителя, а выход подключен
через гидроусилитель к исполнительному механизму, схваченному механической .и гидравлической обратными связямиОЗ.
Ее недостатком является низкая надежность работы вследствие использования в
цепях передачи гидравлического и электрического воздействия подвижных механических и электромеханических элементов, что сужает области применен4 я данных систем.
Целью изобретения является расширение области применения.
Зто достигается тем, что в ней устанолены электрические датчик обратной связи по положению исполнительного механизма, и подключенный к нему усилитель, вход которого соединен с вхогшым каналом электрического воздействия, а вьгходы связаны с другим из встречно-направленных сопел и соплом питания сумматора, выполненными металпнческими.
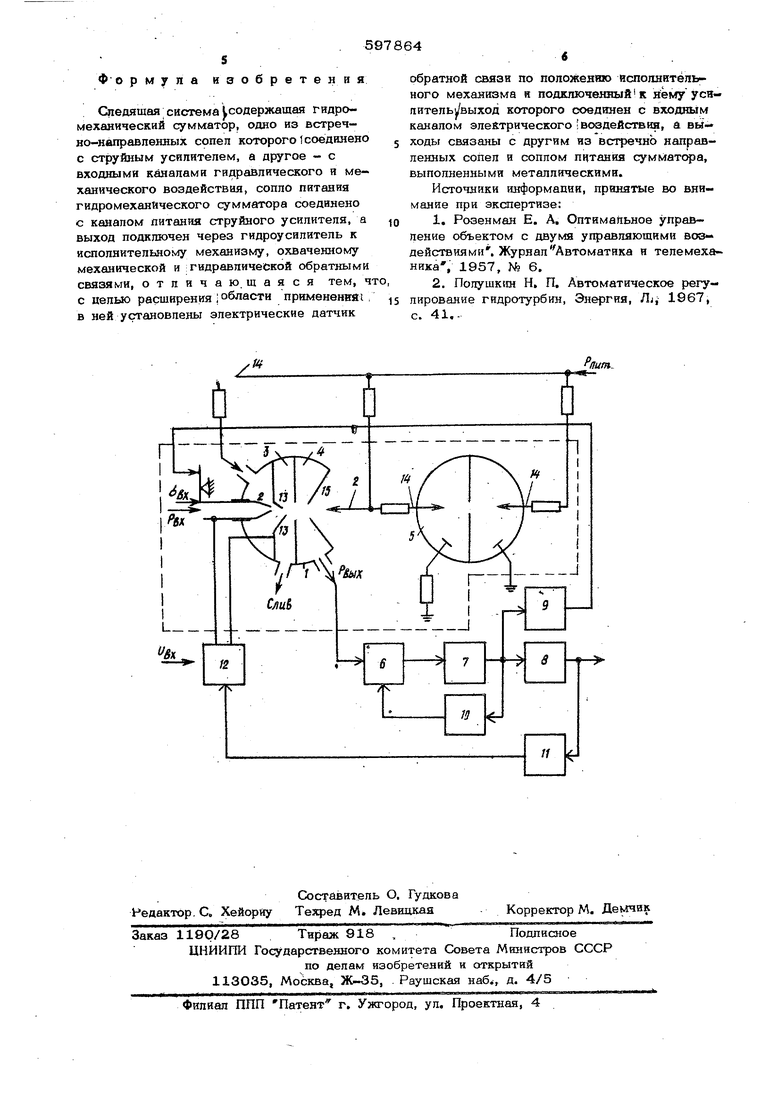
На чертеже показана схема описьшаемой следящей системы, содержащей гидромеханический сумматор 1, который содержит два встречно направленных гидравлических сопла 2, разделительную перегородку с отверстием. Сопло 2 соединено с ка 1алами гидравлического Р-а и механического воздействия. Механическое воздействие 6 д осуществляется перемещением самого сопла 2. .Камера 3 сумматора 1 является сливной. камера 4 - выходной. Сопло 2 соединено со струйным усилителем 5, являющимся внутри каскадным стабилизатором давления, также выполненным в виде струйного гидравлического усилителя со встречно соударяющимися . струями. Следящая система также содержит гидра лический усилитель б, исполнительный механизм 7,. который воздействует на объект регулирования 8, блок 9 механической обратной связи и блок 10 электрической обрат.чой связи. В системе установлены датчик 11 элейтрической. обратной связи по положению исполнительного механизма 7 и подключенный к его выходу усилитель 12, вход которого со диненс каналом.-9лектрического воздействия ( ., а выходы связаны с соплом 2 и соп лом питания 13 сумматора 1, выполненным металлическим. Сопло питания 13 соединено с каналом п тания 14 усилителя 5. Сопло питания 15 т же сведено с Pj . Принцип действия предлагаемой системы заключается в следующем. Сумматор 1 систе мы реализует сумм.ирование электрического ( Вх Гидравлического (Р ) и механического ( G 2 ) воздействий. Гидравлическое давление Р, . в выходно . - ....вы А камере .сумматора равно: . вых Кд-коэффициент пропорциональгде К 1 К 5, , ности. Последнее выражение реализуется тем, что выходное давление fg. зависит от упра ляющего давления Р в сопле 2, от полож ния среза данного сопла 2 относительно вы ходного среза -сопла 13 питания, определя мого механическим управляющим воздействи ем (З-., а также от.управляющего электри ческого напряжения И , прокладываемого к соппу питания 13 и paз feщeннoмy. в нем соплу 2. Зто обстоятельство объясзмется тем, что все эти параметры (Pg И влияютна скорость истечения струижидкости из данного сопла питания (на энергию струи) в результате гидродинамических и электродинамических воздействий на поток питания. . Выходное давление с сумматора 1 поступает на поток питания. Выходное ,давление с сумматора 1 поступает далее на гидроусилитель 6 и управляет через испо11нительный механизм7 объектом регулирования 8 с реализацией требуемых обратных связей. От гидравлического источника чере гидравлические сопротивления давление питания Р„.. подводится к встречно-направяющим соосным соплам питания 13 и 15, результате в сливной камере 3 образуетя область соударения потоков. Сопротивлеиями питания настраивают элемент так, тобы в выходной камере 4 установился улевой выходной сигнал1Г , т-гВо) При подведении гидравлического воздейтвия Р к соплу 2, расположенному внутри сопла питания 13, энергия потока питания изменяется, область соударения потоков перемещается и вызывает изменение выходного давления Е,, в выходной камере 4. ijbix сумматора, При уменьшении Rg происходит обратное изменение Е., ,„. вы X Сопло 2 выполнено так, что может перемещаться вдоль своей оси внутри канала сопла питания 13 под действием механиче- ского воздействия 6.„ . При перемещении сопла 2 изменяется на срезе сопла 13 энергия истекающей из сопла 2 затопленной струи и, как следствие, изменяется анергия струи, истекающей из сопла питания 13. Последнее обусловлено тем, что скорость резупьтируюиего потока, истекающего из сопла 13,определяется как давлением питания Р. при выбранных параметрах гидравлических сопротив|Лелий, так и энергией истекающей из сопла управления струи. При этом также изменяется давление Сопло питания 13 с находящимся в нем соплом 2 выполнены из металла и являют- ся одновременно электродами, на которые подается после усиления с помощью усилителя 12 электрическое воздействие во входном канале К2 . При поступлении напряжения на сопла-электроды. 13 и 2 в результате электродинамического воздействия на протекающий поток диэлектричес кой жидкости изменяется выходное давне« BoixТаким образом, в одном элементе реализуется функция:. k Р причем, в каналах гидравлического и электрического воздействий не используются механические и электромеханические подвижные элементы. По сравнению со следящими системами с несколькими воздействиями одного рода предлагаемая си стема обладает больщими возможностями удовлетворения различным требованиям, так как допускает большую свободу в выборе схемы и параметров системы как по электрическому ка.налу, так и по гидравлическому н механи ческим каналам- управления. Формула изобретения Следящая система 1содержащая гидромеханический сумматор, одно из встречно-направленных сопел которого Тсоединено с струйным усилителем, а другое - с входными каналами гидравлического и механического воздействия, соппо питания гидромеханического сумматора соединено с каналом питания струйного усилителя, а выход подключен через гидроусилитель к исполнительному механизму, охваченному механической и ;гидравлической обратными связями, отличаю, щаяся тем, ч с целью расщирет ия i области применения / в ней установлены электрические датчик обратной связи по попоженню исполнительного механизма и подключенный к нему уснлитель выход которого соединен с входным каналом электрического воздействия, а выходы связаны с другим из встречно направленных сопел и соплом питания сумМатс а, выполненными металлическими. Источники информации, принятые во внимание при экспертизе: 1. Розенман Е. А. Оптимальное управление объектом с двумя управляющими воз действиями . Журнал Автоматика и телемеханика, 1957, NO 6. 2. Полушкин Н. П. Автоматическое регулирование гидротурбин. Энергия, ЛJ, 1967, с. 41..
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическое струйное следящее устройство | 1974 |
|
SU561933A1 |
| Следящий привод | 1976 |
|
SU636423A1 |
| Электрогидравлический преобразователь | 1975 |
|
SU527540A1 |
| Следящий привод | 1976 |
|
SU635296A1 |
| Электрогидропневматический преобразователь | 1976 |
|
SU638754A1 |
| Цифровой электрогидравлический привод | 1978 |
|
SU792002A1 |
| Гидравлический решающий усилитель | 1976 |
|
SU615494A1 |
| ДЕЛИТЕЛЬ ПОТОКА ЖИДКОСТИ ГИДРАВЛИЧЕСКИХ | 1973 |
|
SU385084A1 |
| Следящее устройство к абразивноотрезному станку | 1976 |
|
SU686856A1 |
| Семяпровод сеялки | 1984 |
|
SU1168125A1 |
/«
л//д
