Следящий привод работает следующим образом.
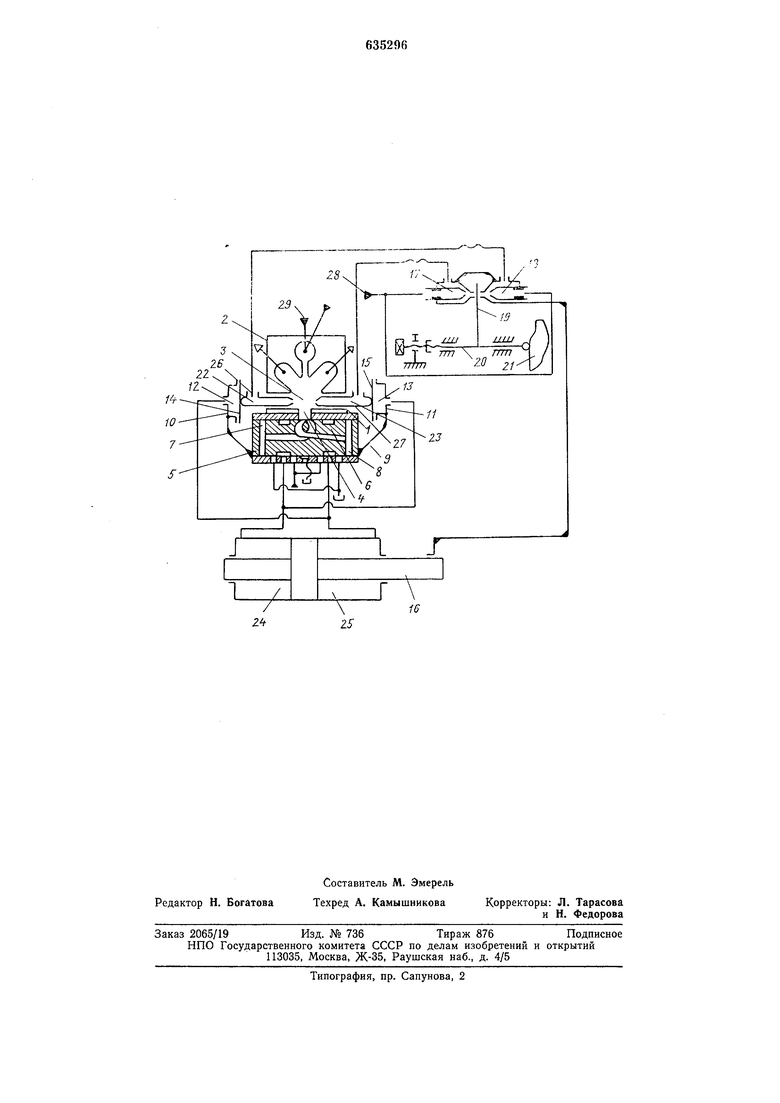
Сжатый воздух от пневматического источника 28 питания иодается в пневматические сопла 17 и 18 сигнала рассогласования и далее поступает во входные каналы 22 и 23 струйного усилителя 2.
Если отсутствует следящее движение, т. е. отсутствует перемещение щупа 20 относительно щаблона 21, то зазоры между нневматическпми соплами 17 и 18 сигнала рассогласования и заслонкой 19 равны между собой. В этом случае входные сигналы струйного усилителя 2 равны ло величине, и струя жидкости, истекающая под давлением из источника 29 питания, проходит через выходной канал 4 и распределяется поровну в торцовых камерах 7 и 8 гидравлического следящего золотника 5.
В случае отсутствия следящего движения, что предполагает нахождение струи жидкости в струйном усилителе 2 в среднем положении, кинетическая энергия струи распределяется между торцовыми камерами 7 и 8 гидравлического следящего золотника 5 поровну и давления в торцовых камерах 7 и8 равны между собой. Плунжер 6 ненодвижен, занимает среднее положение, а следовательно, неподвижен и исполнительный гидродилиндр 16.
При смещении щупа 20 относительно шаблона 21 происходит смещение заслонки 19 из нейтрального ноложения относительно пневматических сопл 17 и 18 сигнала рассогласования, вследствие чего зазоры меладу последними и заслоикой 19 перераспределяются.
Если перемещение щупа 20 происходит, например, вправо, то заслонка 19 также перемещается внраво. При этом зазор между заслонкой 19 и пневматическим соплом 17 увеличивается, а зазор между заслонкой и пневматическим соилом 18 соответственно уменьшается. Это в конечном счете приводит к появлению поперечного перепада давления в камере 3 взаимодействия струйного усилителя 2, в результате чего струя жидкости смещается вправо, что вызывает перераспределение давлений в торцовых камерах 7 и 8 гидравлического следящего золотника 5 - давление в торцовой камере 7 повышается относительно величины давления в торцовой камере 8. Плунжер 6 гидравлического следящего золотника 5 перемещается вправо па величину, обеснечивающую восстановление равномерности распределения кинетической энергии струи, в результате чего нроисходит управление распределением потоков рабочей жидкости между полостями 24 и 25 исполнительного гидроцилиндра 16. Это выражается в увеличении
давления в полости 24 исполнительного гидроцилиндра 16 по отношению к величине давления в полости 25. Под действием перепада давления исполнительный гидроцилиндр 16 перемещается вправо, а так как гидроцилиндр 16 связан с пневматическими соплами 17 и 18 сигнала рассогласования, то последние также перемещаются вправо отпосительно заслонки 19 в нейтральное положение и в системе восстанавливается равновесие.
Если исполнительиый гидроцилиндр 16 воспринимает возмущение нагрузки, то изменяется давление в одной из полостей исполнительного гидроцилиндра 16 и, соответственно, изменяется давление в связанной с данной полостью неподвижной камере 12 или 13 элементов цепи обратной связи по нагрузке.
Если возмущение действует, например, влево, то повышается давление в полости 24, а также в неподвижной камере 13 элемента цепи обратной связи по нагрузке по отношению к величине давления в неподвижной камере 12.
Под действием давления упругое звено 15, деформируясь, перемещает пневматическое сопло 27 в направлении боковой поверхности струи жидкости, что вызывает изменение величины перепада давления управления струйного усилителя 2, в результате чего струя жидкости смещается влево. Плунжер 6 гидравлического следящего золотника 5 также сместится влево, что приведет в конечном счете к изменению перепада давления в полостях 24 и 25 исполнительного гидроцилиндра 16, вследствие чего возмущение, приложенное к исполнительному гидроцилиндру 16, будет скомпенсировано.
Формула изобретения
Следящий иривод, содержащий пневмогидропреобразователь со струйным усилителем, установленные на корпусе пневмогидропреобразователя элементы цепи обратной связи по нагрузке с неподвижными камерами и упругими звеньями и исполнительный гидроцилиндр, жестко связанный с пневматическими соплами сигнала рассогласования, сообщенными с входными каналами струйного усилителя, причем неподвижные камеры элементов цепи обратной связи по нагрузке сообщены с полостями исполнительного гидроцилиндра, отличающийся тем, что с целью повышения устойчивости привода, во входных каналах струйного усилителя установлены подвижные в осевом направлении пневматические сопла, связанные с упругими звеньями цепи обратной связи но нагрузке.
16

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1976 |
|
SU636423A1 |
| Пневмогидропреобразователь | 1974 |
|
SU524929A1 |
| Устройство для автоматической ориентации рабочего инструмента по краю материала | 1972 |
|
SU476869A1 |
| Гидравлический усилитель | 1979 |
|
SU857570A1 |
| Пневмогидравлический следящий привод | 1986 |
|
SU1325203A2 |
| Гидравлический усилитель | 1979 |
|
SU787740A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С ТРЕХКАСКАДНЫМ ЭЛЕКТРОГИДРОУСИЛИТЕЛЕМ | 2012 |
|
RU2505715C1 |
| Гидравлический следящий привод | 1977 |
|
SU696184A1 |
| Гидравлический привод | 1989 |
|
SU1672010A1 |
| РЕЗЕРВИРОВАННЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2190129C2 |