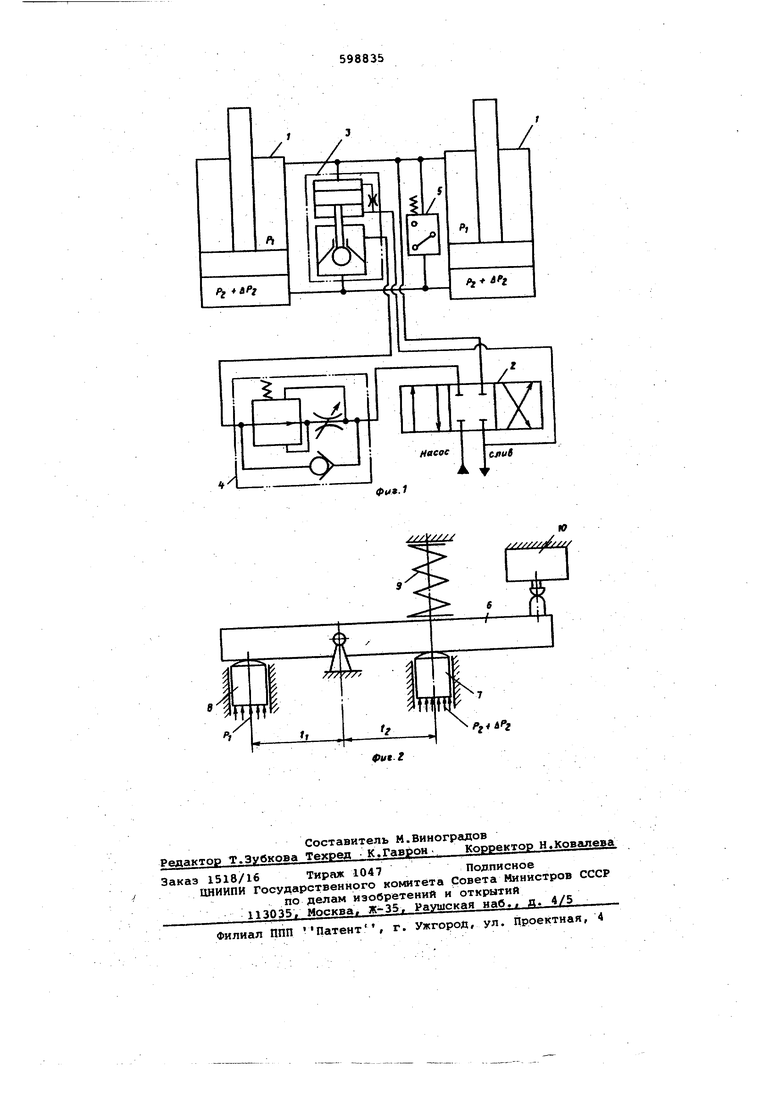
Штоковые полости цилиндров 1 (пслости опускания стрелы) соединены магистралями с штуцером Опускание распределителя 2, с управляющей полостью гидроэамка 3 и с толкателем 8 предохранительного датчика 5.
Поршневые полости цилиндров 1 (полости поднимания стрелы) заперты гидрозамком 3 и соединены с толкателем 7 предохранительного датчика 5. Гидрозамок 3 через дроссель 4 с регулятором и обратным клапаном соединен со штуцером Подъем распределителя.
При включении команды на опускание стрелы (на схеме правое-положение pac пределителя) распределитель 2 соединяет насосную магистраль с магистралью опускания (штоковые полости цилиндров 1, управление гидроэамком 3 и толкатель 8 предохранительного датчика 5), а сливную магистраль - с магистралью поднимания (поршневые полости цилиндров 1, гидрозамок 3 и дроссель 4с регулятором и обратным клапаном).
В магистрали опускания давление возрастает до значения Р{ , необходимого для открытия гидрсзамка 3, через который (а также через- дроссель с регулятором 4, определяющий скорость опускания) осуществляется слив рабочей жидкости нз поршневых полостей цилиндров 1; стрела при этом опускается. Давление Pj (его величина тем выше, чем больше грузовой момент «а стреле) через поршни действует на поршневые полости и вызывает в них, помимо давления Pj от внешней нагрузки на штоке, давление uPj О ношение давления iP к Р пропорционально отношению рабочих площадей штоковой и поршневой полостей. Итак, в процессе опускания на толкатель 7 датчика 5 действует сумма давлений где APj, - избыток давления сверх давления,, обусловленного грузовым моментом. Компенсирует зтот избыток дав ления подведенное к толкателю 8 давление PJ магистрали опускания. Оно создает момент на коромысле 6, Направленный против момента от толкателя 7, Длина первого плеча Р{ относится к длине второго плеча Р пропорционально отношению площадей штоковой и поршневой полостей цилиндров 1, Следовательно, момент на коромысле 6 от давления Pj полностью уравновешивает момент от давления дР а на срабатывание предохранительного датчика влияет только давление Рд от грузового момента на стреле крана.
При срабатывании предохранительного датчика г шкропереключатель 10 выдает электрический сигнал на выключение распределителя 2, который устанавливается в нейтральное положение отклк1чая гидроцилиндры от насоса. Гидрозамок 3 .запирает гидроцилиндры, дальнейшее опускание стрелы, а следовательно, и увеличение грузового момента прекращается. При срабатывании предохранительного датчика отключается также распределитель, управляющий подъемом груза.
При включении команды на подъем стрелы (на схеме левое положение распределителя) распределитель 2 соединяет насосную магистргшь с магистраль поднимания, а сливную - с магистралью опускания, В магистрали опускания возрастает давление Pj из-за сопротивления трасс слива. Это давление тем выше, чем больше скорость поднимания стрелы. Давление Р| вызывает в поршневых полостях избыток давления др j но компенсирует его влияние на предохранительном датчике 5, как это описано в режиме опускания стрелы.
Когда стрела стоит на месте в определенном положении по углу наклона, давления Р, И APg отсутствуют и предхранительный датчик работает, как обычное реле давления.
Испытания опытного образца устройства для ограничения грузового момента гидравлического грузоподъемного крана показали, что предельный угол снижения стрелы при прочих равных условиях увеличился на л 30%,
Формула изобретения
Устройство для ограничения грузового момента гидравлического грузоподъемного крана, содержащее предохранительный датчик, подключенный к гидроцилиндрам, гидрозамку, дросселю с регулятором и обратным клапаном и управляющему распределителю системы подъема-опускания стрелы крана и связанный с системой управления распределителя, отличающееся тем, что, с целью повышения нгудежности работы крана путем обеспечения оптимальной загрузки его по грузовому моменту, предохранительный датчик выполнен в виде реле разности давления и содержит подпружиненное Двуплечее коромысло с гидравлическими толкателями, перрое плечо коромысла через гидравлический толкатель связано со што.ковыми полостями гидроцилиндров, а втрое через гидравлический толкатель с поршневыми полостями гидроцилиндров
Источники информации, принятые во внимание при экспертизе:
1. Мелик-Гайказов В,и, и др. Гидропривод тяжелых грузоподъемных машин и самоходных агрегатов, М,,Машиностроение 1968, рис, 85 и 86,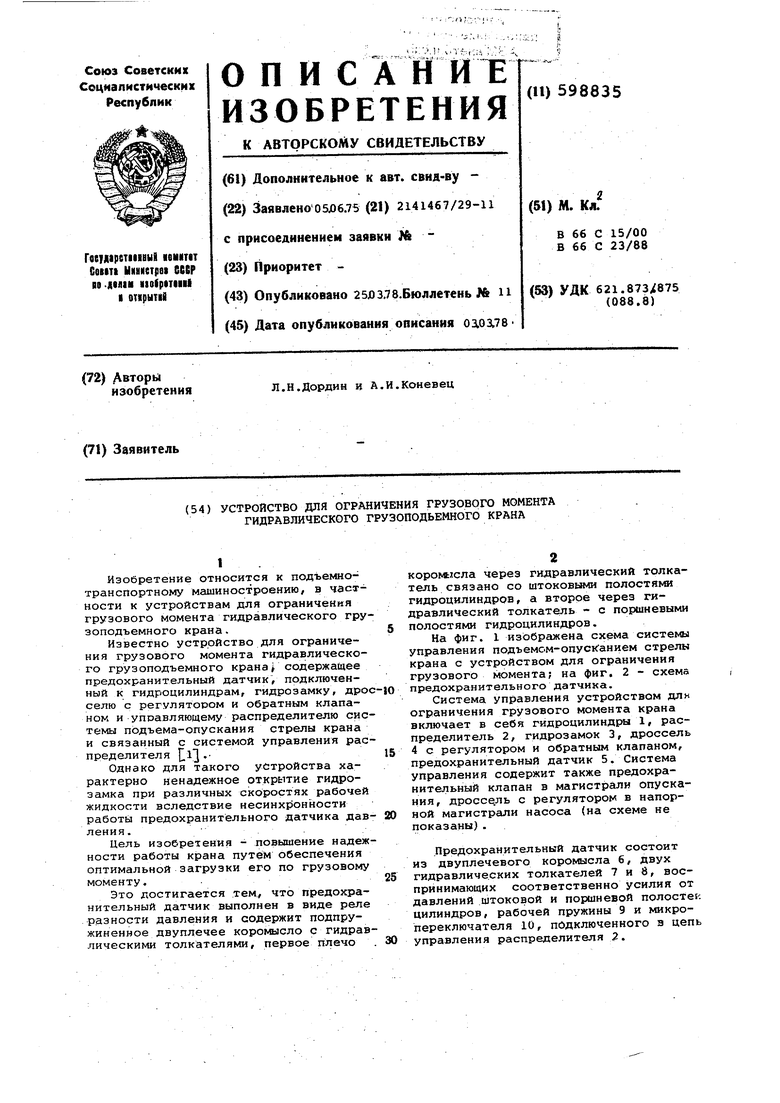
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД ГРУЗОПОДЪЕМНОГО КРАНА | 2002 |
|
RU2230020C1 |
| Кран грузоподъемный | 2022 |
|
RU2790730C1 |
| Гидросистема специального оборудования транспортно-заряжающей машины на колесном шасси | 2021 |
|
RU2787601C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ ПРИВОДОМ ГРУЗОПОДЪЕМНОГО КРАНА | 1999 |
|
RU2179144C2 |
| НАТЯЖНОЕ УСТРОЙСТВО СКРЕБКОВОГО КОНВЕЙЕРА ПОГРУЗОЧНОЙ МАШИНЫ | 1992 |
|
RU2057695C1 |
| ГИДРОПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2020 |
|
RU2733004C1 |
| Гидропривод грузовой лебедки стрелового крана | 1984 |
|
SU1294760A1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2002 |
|
RU2213042C1 |
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |