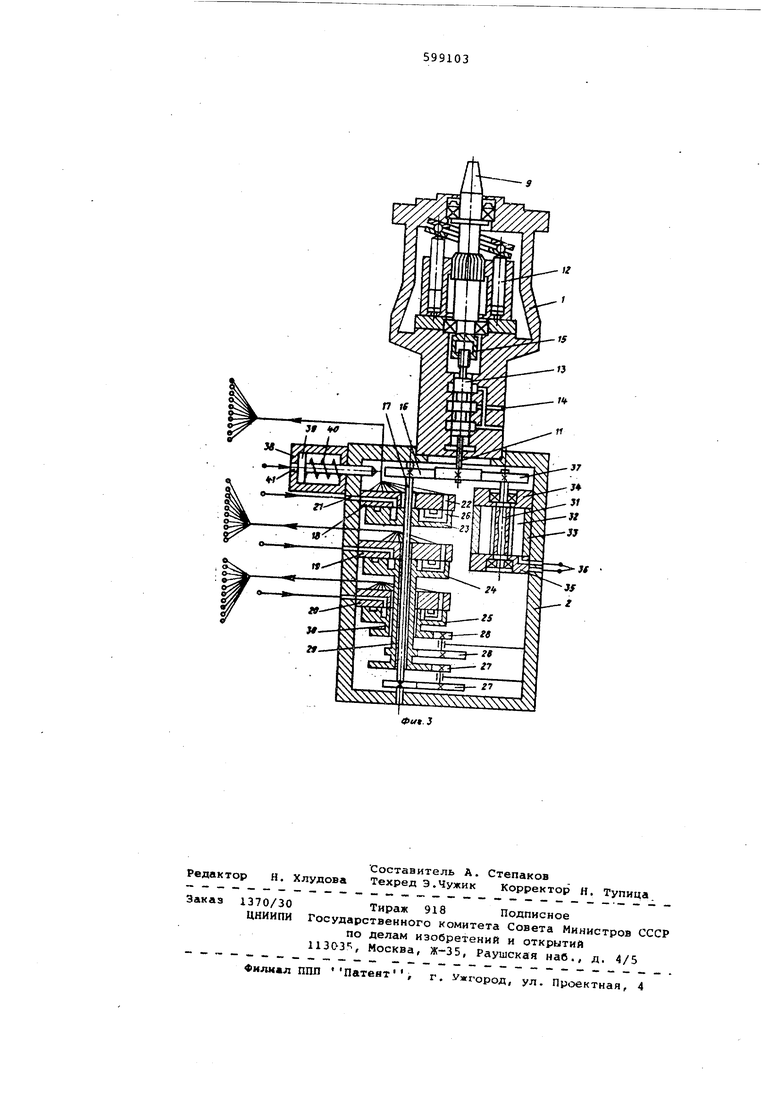
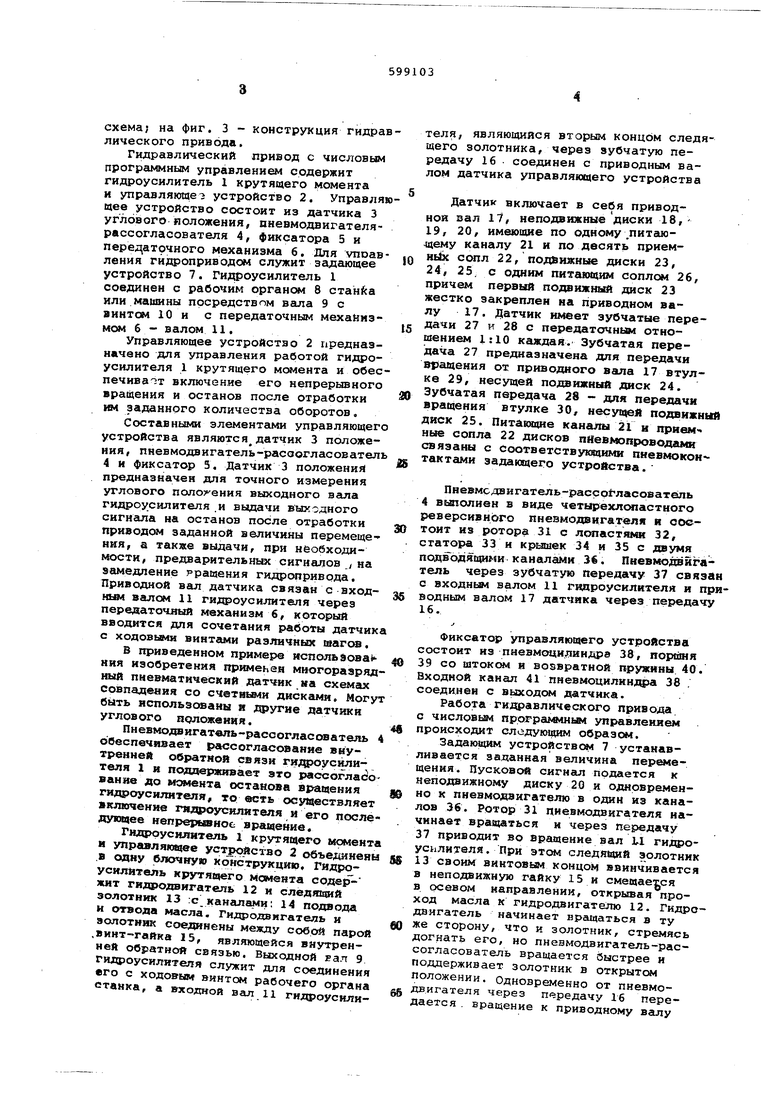
схема; на фиг. 3 - конструкция гидравлического привода.
Гидравлический привод с числовым программным управлением содержит гидроусилитель 1 крутящего момента и управляющее устройство 2. Управляющее устройство состоит из датчика 3 углового положения, пневмодвигателярассогласователя 4, фиксатора 5 и перед атрчного механизма 6. Или vnoasления гидроприводом служит задающее устройство 7. Гидроусилитель 1 соединен с рабочим органом 8 станка или машины посредством вала 9 с винтом 10 и с передаточным мехайизм 1 6 - валом 11.
Управляющее устройство 2 предназначено для управления работой гидроусилителя 1 крутящего момента и обеспечивает включение его непрерывного вращения и останов после отработки им заданного количества оборотов.
Составными элементги ш управляющего устройства являются датчик 3 положения, пневмодвигатель-расоогласователь 4 и фиксатор S, Датчик 3 положений предназначен для точного измерения углового пологие ни я выходного вгша гидроусилителя .и выдачи выходного сигнала на останов после отработки приводом заданной величины перемещенкя, а также выдачи, при необходимости, предварительншс сигналов / на замедпение яращения гидропривода. Приводной вал датчика связан с входют вало 11 гидроусилителя через передаточный механизм б, который вводится для сочетания работы датчик с ходовьв-ш винтами различных шагсж.
В приведенном примере испольдова) ния изобретения примеьея многоразрядный пневматический датчик на схемах Совпадения со счетйьои|и дисками. Могу быть нспользсшаны и даугие датчики углового положяикя,
Пневмодвигатвль-рассогласователь обеспечивает рассогласование внутренней обратной связи гидцюусйлителя 1 и поддерживает это рассогласование до момента останове вращения гидроусилители, то есть осу«вествлявт включение гидроусилителя и его последупцее непрерЕюнос вращение.
Гидроусилитель 1 крутящего момент и управлякняее устройство 2 объединены ,в одну блочную конструкцию. Гидроусилитель крутящего момента содер жит гидродвигатель 12 и следящий золотник 13 :с каналами: 14 подвода и отвода масла. Гидродвигатель и эолотншс соединены между собой парой ,винт гайка 15, являющейся внутренней обратной связью. Выходной кал 9 гидроусилителя служит для соединения «го с ходовым винтом рабочего органа станка, а вводной вал 11 гидроусилиеля/ ЯВЛЯЮЩИЙСЯ вторым концом следящего золотника, через зубчатую передачу 16 соединен с приводным валом датчика управляющего устройства
Датчик включает в себя приводной вал 17, неподвижныедиски 18,19, 20, имеющие по одному .питаю4цему каналу 21 и по десять приемHbtx сопл 22, под&ижные диски 23, 24, 25. с одним питаюицш соплом 26, причем первый подвижный диск 23 жестко закреплен на приводном валу 17. Датчик имеет зубчатые передачи 27 и 28 с передаточным отношением 1:10 каждая. Зубчатая передача 27 предназначена для передачи Вращения от приводного вала 17 втулке 29, несущей подвижный диск 24.
Зубчатая передача 28 - для передачи вращения втулке 30, несущей подвижная диск 25. Питающие канаЛы 21 и прием- ные сопла 22 дисков пневмопроводами связаны с Соответствукздими пневмоконтактами задающего устройства.
Пневмсдвигатель-рассо ласоватвль 4 выполнен в виде четьфехлсжастного реверсивного пневмодвигателя я соетоит из ротора 31 с лситастями 32, статора 33 и 34 и 35 с двумя подводящими каналами 3€. Пневмодайгатель через зубчатую передачу 37 связан с входньм валом 11 гидроусилителя и приводным валом 17 датчика через передачу 16.
Фиксатор управляющего устройства состоит из пневмс и.линдра 38, поршня
39 со штоком и возвратной пружины 40. Входной канал 41 пневмоцилиндра 38 . соединен с выходом датчика.
Работа гидравлического привода с чисповам прргра1«и1ым управлением
происходит следующим образом.
Задающим устройстве 7 устанавливается заданная величина перемещения. Пусковой сигнал подается к неподвижному диску 20 и однрвременно к пневмодзигателю в один из каналов 36. Ротор 31 пиевмодвигателя начинает вращаться и через передачу 37 приводит во вращение вал LI гидроусилителя. При этом следящий золотник
13 своим винтовым концом ввинчивается в неподвижную гайку 15 и смещается в осевом направлении, открывая проход масла к гидродвигатеЛю 12. Гидрсдвигатель начинает вращаться в ту же сторону, что и золотник, стремясь догнать его, но пневмодвигатель-рассогласователь вращается быстрее и поддерживает золотник в открытое положении. Одновременно от пневмодвигателя через передачу 16 передается вращение к приводному валу
17 датчика углового положения, который производит отсчет оборотов, сделанных гидроусилителем. За один оборот ва.па 17 с диском 23 диск 24 повернется на 0,1 оборота, а диск 25 на 0,01 долю оборота. Питающие сопла 26 подвижных дисков скользят по приемньод соплам 22 неподвижных дисков. 11ри этом кги только йиаающие сопла 26 дисков 23, 24 и 25 окажутся одновременно против тех приемных сопл 22 дисков 18( 1 в 20, котюрае соединены с заданными пневмоконтактами, на входе 41 фиксатора появится сигнал. При появленнн сигнала иа входе фшссатора его шток внд&явется и эаотсоюрмт вравк вие следящего золотника 13 и вала 17 Катчшса. Вал гидродаигателя : продолжаетвршоаться и, навинэд|1ааяе;ь 15 аа внвт золотник а г ембвф&е золотва& в осевом напрешлевЮ. Ш аш|ие клл&1Ш ttj этом перек пь0Д дтея, л Э| ацевяе вшодного вала 9/nf eKikeu4aetx a. йа stem отработка защаняой веяичт ы пё «ес«ения окончена и подается оигвал коаца поанционировавия.
При необхо ооюстя з«шедления врацёния ала .гищ сшрйвода в конце отработки заданной величины перемеФи.1
щения предусмотрены выходные сигналы предварительного замедления, которые снимаются с выходов дисков старших разрядов в направляются к 5 устройствам замедлений, в качестве которых может бапсъ использован блок дросселей, устанавлива шй на сливной линии гидрощжвода. ФО1я«ула изобретения Гидравлический привод с числовым n| orpcLi im iM упргшленвем, содхержащий гидроусилитель крутящего мсж ента, соединенный с управлгаоцим устройством передаточным механизмом и® задаюс ее устройство, отличающийся тем, что, с целью расширения функциональных возможностей, в нем управлякадее устройство вшюлнено в виде пневматического датчика в положения с фиксатором и пневмодвигателя, соединенных параллельно посредством передаточного механизма.
Источники информации, принятые во внимание при экспертизе: 5 1. Авторское свидетельство СССР 205102, кл. 05 а 19/00, 196. 2. Ратмиров В. А. в др. Повьиз1ение точности и производительности станков с программным управлением. М., Машиностроение, 1970, с. 41-42.
HtDJ
fm.
Фиг 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для доворота и фиксации круглого стола станка | 1977 |
|
SU638448A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| Станок для обработки концов труб | 1982 |
|
SU1065088A1 |
| Струйная система программного управления | 1972 |
|
SU473159A1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| ГИДРОПРИВОД ДИСКРЕТНОГО УГЛОВОГО ХОДА | 2012 |
|
RU2497027C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1973 |
|
SU1840517A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ДИСКРЕТНОГО УГЛОВОГО ПЕРЕМЕЩЕНИЯ | 2010 |
|
RU2445517C2 |
| ПРИВОД ШПИНДЕЛЯ МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 1973 |
|
SU374126A1 |