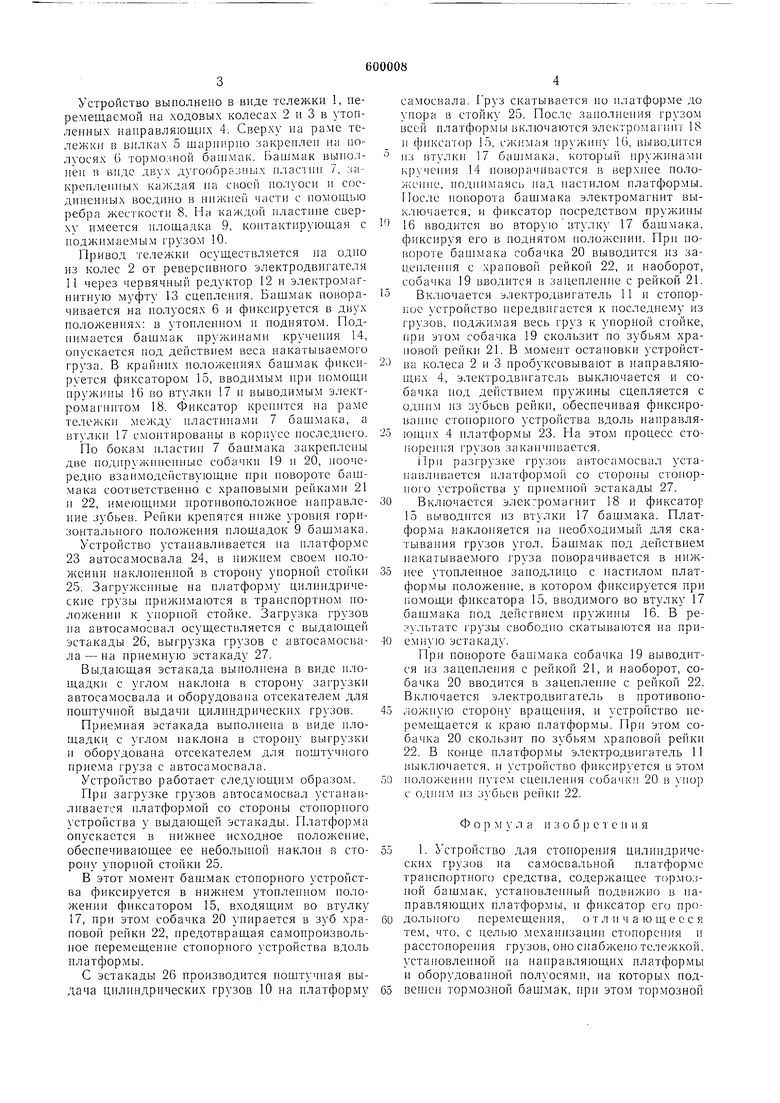
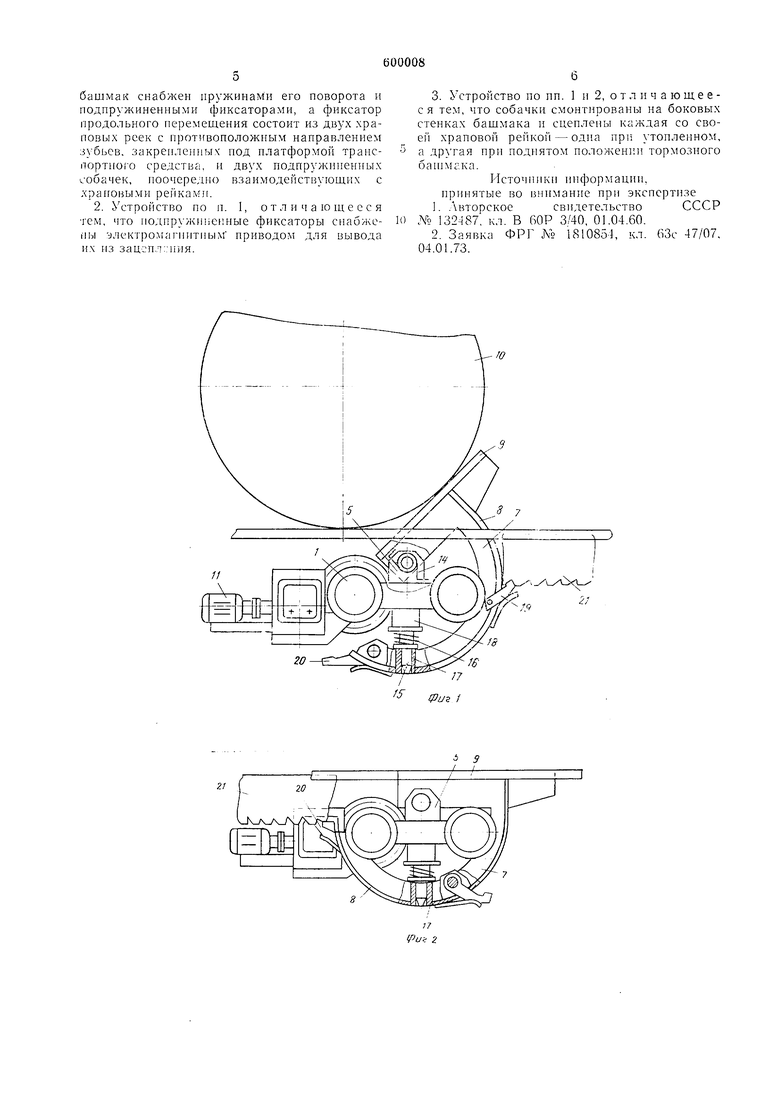
Устройство выполнено в виде тележки 1, перемещаемой на ходовых колесах 2 н 3 в утопленных направляющих 4. Сверху на раме тележкн в вилках 5 mapnipiio закреилеи на полуосях 6 тормониой бан1мак. Башмак выполиен в виде двух дугообразных пластпп 7, закрепленных каждая на своей иолуоси и соединенных воедино в нижней части с помощью ребра жесткости 8. На каждой нластнне сверху имеется площадка 9, контактирующая с ноджимаемым грузом 10.
Привод тележки осуществляется на одно из колес 2 от реверсивного электродвигателя 11 через червячный редуктор 12 и электромагнитную муфту 13 сценления. Бащмак новорачиваетея на полуосях 6 н фиксируется в двух положениях: в утопленном и поднятом. Поднимается бащмак нружинами кручеиия 14, опускается под действием веса накатываемого груза. В крайних положениях бащмак фиксируется фиксатором 15, вводимым ирн иомощи нруж1 ны 16 во втулкн 17 и выводимым электpOMaiHHTOM 18. Фиксатор крепится на раме тележки между пластипами 7 бащмака, а втулки 17 смонтироваиы в корпусе последне|-о.
По бокам нластии 7 бащмака закреплены две нодиружиненные собачки 19 н 20, поочередно взаимодействующие ири повороте бащмака соответственно с храповыми рейками 21 и 22, имеющими противоположное панравление зубьев. Рейки креиятся ниже уровня горизонтального положения площадок 9 бащмака.
Устройство устанавливается иа платформе 23 автосамосвала 24, в иижнем своем иоложении наклоненной в сторону упорной стойки 25. Загружеппые на платформу цилиндрические грузы ирижимаются в транспортном положении к уиориой стойке. Загрузка грузов на автосамосвал осуществляется с выдающей эстакады 26, выгрузка грузов с автосамосвала - па нриемпую эстакаду 27.
Выдающая эстакада выиолиена в виде нлощадки с углом наклона в сторону загрузки автосамосвала н оборудована отсекателем для пощтучной выдачи цилиндрических грузов.
Приемная эстакада вынолнепа в виде нлощадки. с углом наклона в сторону выгрузки н оборудована отсекателем для нощтучного приема груза с автосамосвала.
Устройство работает следующим образом.
При загрузке грузов автосамосвал устанавливается платформой со стороны стопорного устройства у выдающей эстакады. Платфор.ма опускается в нижнее исходное положение, обеспечивающее ее небольиюй наклон в сторону упорной стойки 25.
В этот момент бащмак стопорного устройства фиксируется в нижнем утопленном положении фиксатором 15, входящим во втулку 17, при этом собачка 20 упирается в зуб храновой рейкн 22, предотвращая самопроизвольное неремещен 1е стопорного устройства вдоль платформы.
С эстакады 26 производится пощтучиая выдача цилиндрических грузов 10 на платформу
самосвала. Груз скатывается но нлатформе до упора в стойку 25. После занолнения грузом всей платформы включаются электромагнит 18 н фиксатор 15, сЖ1мая пружину 16, вывод1ггся из 1 тулк11 17 бан1мака, который пружинами кручении 14 поворачивается в верхиее ноложенне, поднимаясь над настилом платформы. После поворота бащмака электромагнит выключается, и фиксатор носредством пружины 16 вводится во вторую втулку 17 бащмака, фиксируя его в поднятом положении. При повороте башмака собачка 20 выводится из зацепления с храновой рейкой 22, и наоборот, собачка 19 вводится в заценление с рейкой 21.
Включается электродвигатель 11 н стоиорнос устройство иередвигается к носледнему из грузов, поджимая весь груз к упориой стойке, при этом собачка 19 скользит по зубья.м храновой рейки 21. В момент остановки устройства колеса 2 и 3 пробуксовывают в иаправляюищх 4, электродвигатель выключается и собачка под действием пружины сцепляется с одиим из зубьев рейки, обеспечивая фиксирование стоиориого устройства вдоль паиравляющих 4 платформы 23. Па этом процесс стонореиия грузов закапч1гвается.
При разгрузке грузов автосамосвал устанавливается платформой со стороны стонорного устройства у нрнемной эстакады 27.
Включается электромагнит 18 и фиксатор 15 выводится из втулки 17 бащмака. Платформа наклоняется иа необходнмый для скатывания грузов угол. Башмак нод действием иакатываемого j-руза иоворачивается в нижнее утопленное заподлицо с иастилом платформы положение, в котором фнкснруется при помощи фиксатора 15, вводимого во втулку 17 бащмака нод действием пружины 16. В результате грузы свободно скатываются на приемную эстакаду.
При повороте бащмака собачка 19 выводится из зацепления с рейкой 21, и наоборот, собачка 20 вводится в заценленне с рейкой 22. Включается электродвигатель в противоположную сторону врашепия, и устройство неремещается к краю платформы. При этом собачка 20 скользит по зубьям храновой рейки 22. В конце платформы электродвигатель 11 выключаетея, и устройство фиксируется в этом положении путем сценленпя собачкп 20 в упо) с ОДН1ГМ из зубьев рейкн 22.
Фор м у л а н 3 о б р е т с н и я
1. Устройство для стоиорения цилиндричееких грузов на самосвальной платформе транспортного средства, содержащее тор.мозной бащмак, установленный подвижно в ианравляющих платформ1, и фикеатор его продольного перемещения, о т л и ч а ю нд е е с я тем, что, с механизацни стоиорения i раестопорепия грузов, оно снабжено тележкой, установлеппой на нанравляющнх платформы и оборудованной полуосямн, )ia которых подвешен тормозной бащмак, при этом тормозной
башмак снабжен пружинами его поворота и подпружиненными фиксаторами, а фиксатор продольного перемещения состоит из двух храповых реек с противоположным направлением зубьев, закрепленных под платформой транспортпого средства, и двух подпружипенпых собачек, поочередно взаимодействующих с храповыми рейками.
2. Устройство по п. 1, отличающееся тем. что иодпружипепные фиксаторы снабжепы электромагнитным приводом для вывода их из зацспл::пия.
3. Устройство по пп. 1 п 2, отличающееся тем, что собачки смонтированы на боковых стенках бащмака п сцеплепы каждая со своей храповой рейкой - одна npii утоплепном, а другая прп подпятом положении тормозного бапшгка.
Источппкп ппформации, принятые во внимание при экспертизе
1.АвторскоесвпдетельствоСССР Л 132487. кл. В 60Р 3/40. 01.04.60.
2.Заявка ФРГ Л 1810854, кл. 63с 47/07. 04.01.73.
| название | год | авторы | номер документа |
|---|---|---|---|
| Контейнер-платформа для транспортирования большеформатных строительных панелей | 1981 |
|
SU1017606A1 |
| Устройство для управления механизмом перемещения | 1983 |
|
SU1174227A1 |
| КРУГЛОПИЛЬНЫЙ СТАНОК ДЛЯ РАСПИЛОВКИ ДРЕВЕСИНЫ | 2006 |
|
RU2319606C2 |
| Транспортное средство для перевозки длинномерных грузов | 1984 |
|
SU1191333A1 |
| ПАКЕТОФОРМИРУЮЩАЯ МАШИНА | 1968 |
|
SU220839A1 |
| МЕХАНИЗИРОВАННАЯ АВТОМОБИЛЬНАЯ ПАРКОВКА | 2012 |
|
RU2490409C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВКИ | 1970 |
|
SU287051A1 |
| Тележка для перевозки грузов в транспортном средстве | 1972 |
|
SU559852A1 |
| Самоходная тележка | 1957 |
|
SU113595A1 |
| Путевое тормозное устройство для сортировочных горок | 1939 |
|
SU57457A1 |

