(54) ПОГРУЗОЧНОЕ УСТРОЙСТВО ГОРНОЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОГРУЗОЧНЫЙ ОРГАН | 1991 |
|
RU2042830C1 |
| ПОГРУЗОЧНЫЙ ОРГАН | 1990 |
|
RU2022894C1 |
| Погрузочная машина | 1975 |
|
SU600307A1 |
| Погрузочный орган | 1987 |
|
SU1544689A1 |
| Гидросистема проходческого комбайна | 1980 |
|
SU1073452A1 |
| Погрузочная машина | 1982 |
|
SU1084468A1 |
| Погрузочная машина | 1983 |
|
SU1086188A1 |
| МНОГОГРЕБКОВЫЙ ПОГРУЗОЧНЫЙ ОРГАН | 1996 |
|
RU2112145C1 |
| Погрузочный орган горной машины | 1984 |
|
SU1218149A1 |
| Многогребковый погрузочный орган | 1990 |
|
SU1721268A1 |
Изобретение относится к погрузочным устройствам с Harpe6aroiifflNra лапами и может быть использсюано в конструкциях угольных и шородных. комбайнов, а также погрузочных машин. Известна погрузочная машина с нагребаюищми лапами, у которой привод нагребаюишх лап осуществляется с помоишю гидромотора и многоступенчатого редуктоРа W Недостатком такой погрузочной машинь является сложность и трудоемкость изготовления многоступенчатого редуктора, большие его габариты, увеличивающие уго наклона приемного стола. Наиболее близким к предлагаемому является погрузочное устройство горной машины, вкпючаюгиее приемный стол, ведущие диски с нагребающими лапами, привод и синхронизирующий механизм 2. Недостатками такой конструкции являет ся сложность и трудоемкость изготовления привода, а большие габариты не позволяют уменьшить угол наклона приемного стола почве выработки, что, как известно, повы- шает эффективность погрузки. Наличие в передней части погрузочной машины электродвигателей затрудняет работу машины в обводнешшгх, особенно в наклонных выработках. Жесткая кинематическая связь для синхронизации работы лап еще более усложняет констру1щию погрузочных устройств, так как затрудняет их компоноврсу. Целью изобретеш я является упроше ше конструкции привода и обеспечения синхронизации работы нагребающих лап. Поставленная цель достигается тем, что привод каждой лапы выполнен в виде двух гидроцияиндров шарнирно закрепленных одним концом на приемном столе, а другим на ведущем диске, на оси которого закреплен кулачок, кинематически связанный с двумя четырехходовыми распределителями, а синхро1тзирующий механизм выполнен в виде двух следящих устройств, каждое из которьгх состоит из кулачка, закрепленного на оси ведущего диска одной лапы, и кинематически связанного с ним двуххоцового распределителя;, соединенного магист ралью с полостью одного из гядроцилиндро привода другой лапы.
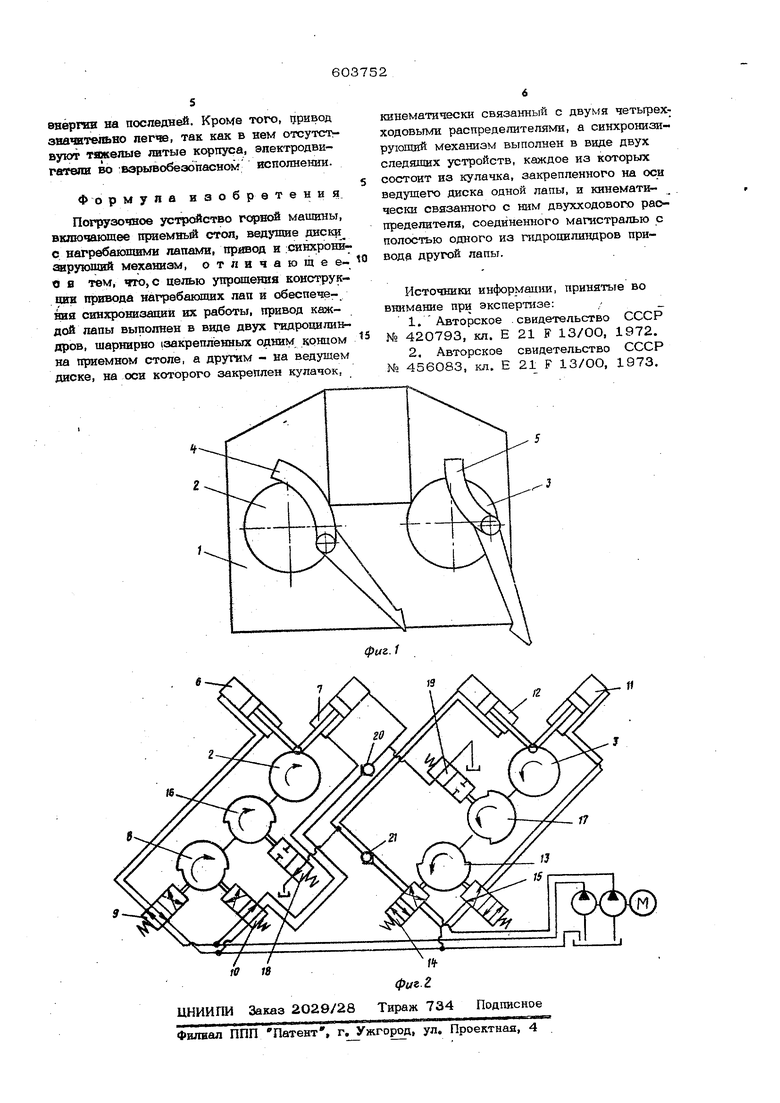
На фиг. 1 изображен обишй вид погрузочного устройства в плане; на ({нг. 2 гидравлическая схема привода нагребающид лап и синхронизирующего механизма.
Погрузочное устрсйство состоит на приемного стола 1, ведущих дисков 2 и 3 с нагребающими папами 4 и 5, привода нагребающих лап и синхронизирующего механизма..
Привод левой нагребающей лапы состоитиз двух гидроцилиндров 6 и 7, корпуса которых шарнирно закреплены на приемном столе 1, а штоки шарнирно связаны с ёедущим диском 2, и распределительного устройства, состоящего из кулачка 8, закрепленного на оси ведущего диска 2, и кинематически связанного с двумя четырехходовыми распределителями 9 и 10.
Привод правой лапы выполнен аналогиЧ но - из двух гидроцилиндров 11 и 12 и распределительного механизма, состоящего из кулачка 13 и двух четырехходовых распредеяителей 14 и 15.
Синхронизирующий механизм выполнен в виде двух следящих устройств, состоящих из кулачков 16 и 17, закрепленных на осях ведущих дисков 2 и 3, кинематическн связанных с двухходовыми распределителями 18 и 19.
В магистрали гидроцилиндров 7 и 2 Г связанных с двухходовыми распределителями 18 и 1 9, встроены обратные клапаны i 20 и 21.
Привод каждой лапы осуществляется следующим образом.
Кулачок 13 установлен относительно распределителей 14 и 15 и гидроцилиндров
11и 12, что переключает четырехходовые распределители 14 и 15 в моменты прохождения поршнями гидроцилинпров 11 и
12верхних или нижних мер-геьгх точек. В положении, указанном на фнг.2, рабочая жидкость под давлением поступает одновременно в поршневую полость гидроцилиндра
12 и штоковую полость пвдроцилиндра 11. Когда поршень гидротшливдра 11 дойдет до верхней мертвой точки, кулачок 13 переключит четырехходовой распределитель 14, соединив поршневую полость пвдроци-. линпра 11 с напорной магистралью, а штоковую - со сливом. Аналогичная картина произойдет и с гидроцилиндром 12. Когда его поршень достигнет нижней метггвой точки, кулачок 13 переключит четырехходовой распределитель 15, соединив поршневую полость со сливом, а штоковую - с напор,
ной магистралью. Следующее переключеие распределителя 14 пр(жзсйдет, когда поршень шдрошалнндра 11 дойдет до нижней мертвой точ$ш, а распределителя 15, когда поршень гидроаипиндра 12 дойдет до верхней мертвой точки и т.д. Таким образом осуществляется непрерьгеное вращение ведущего диска.
Синхронизирующий механизм работает следующим образом.
Кулачки 16 и 17 следящих устройств устанавливаются так, что при заданном движении ведущих дисков распределители 18 и 1 9 разъединяют поршневые полости пздроцилиндров 7 и 11 от сливной мапяо рали или запирают их одновременно или несколько раньше,, чем распределитегш 10 и 14 подают туда давление или, соответс- венно, соединяют их со сливом.
Если например , ведущий диск 3 при вращении к моменту достижения поршнем гидроципиндра 7 верхней мертвой точки отстает от своего зада гаого положения, то кулачок 8 переключит распределители 1О гидроцилиндра 7 раньше, чем кулачок 17 переключит распределитель 19, и напорная магистраль левой лапы через распределитель 1 9 соединится со сливом, Ведущий диск 2 левой папы остановится и будет стоять до того момента, пока ведущий диск 3 не займет заданного положения. В этот момент кулачок 17 переключит распределитель 19 и разъединит напорную магасрраль левой лапы от слива, после чего во зобновится согласованное двгокение ведущих дисков.
Если ведущий диск 3 при вращении к моменту дос-гежения поршнем гидроцилиндра 7 гзижней мертвой точки отстает от своего заданного положения, то кулачок 8 переключит распределитель 10 гидропилинда 7 раньше, чем кулачок 17 переключит распределитель 19, и сливная магистраль левой лапы будет заперта распределителем19.
Ведущий диск 2 левой лапы остановится и будет стоять до того момента, пока ведущий диск 3 не займе-г заданного положения. В этот момент кулачок 17 переключит распредепитень 19 и соединит полость гидроцилиндра 7 со сливом, после чего возобновится согласованное, движение ведущих дисков.
Предлагаемьй привод проще в изготовл&нии, так как изготовление гидрсщилиндров менее трудоемко, чем изготовление многостз пенчатых редукторов. Кроме того, на всех современных погрузочных машинах имеется гидропривод, так что установка допопнител ных гидроцилиндров привода нагребающих лап не приведет к появлению нового вида
