.(54) УСТРОЙСТВО СИНХРОНИЗАЦИИ ДВИЖЕНИЯ ГИДРОЦИЛИНДРОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический пресс | 1977 |
|
SU737242A1 |
| ГИДРОПРИВОД ФРЕЗЕРНОГО СТАНКА | 1973 |
|
SU386758A1 |
| Устройство управления грузоподъемным краном | 1980 |
|
SU965966A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1993 |
|
RU2061914C1 |
| Гидросистема синхронизации гидроцилиндров листогибочной машины | 1988 |
|
SU1539401A1 |
| Система синхронизации штоков двух гидроцилиндров | 1977 |
|
SU691613A1 |
| Механизм регулирования закрытой высоты пресса с гидравлическим предохранителем от перегрузки | 1981 |
|
SU1027062A1 |
| НАТЯЖНОЕ УСТРОЙСТВО СКРЕБКОВОГО КОНВЕЙЕРА ПОГРУЗОЧНОЙ МАШИНЫ | 1992 |
|
RU2057695C1 |
| Гидропривод | 1972 |
|
SU567855A1 |
| Пневмогидравлический мультипликатор | 1985 |
|
SU1315664A1 |
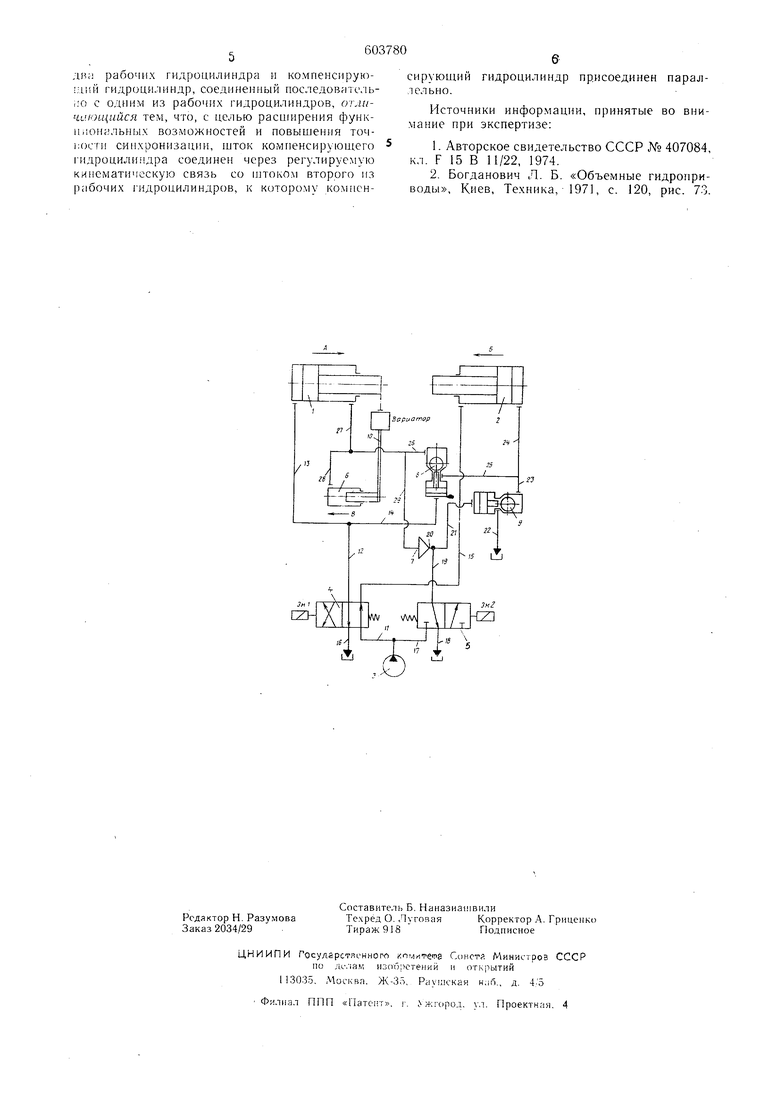
Изобретение относится к устройствам, обеспечивающим возвратно-поступательное синхронизированное движение рабочих органов различных машин, в частности гидропрессоров. Известно устройство синхронизации движения гидроцилиндров, поршневые полости которых сообшены между собой через редукционные клапаны, которые, в свою очередь, сообш,ены между собой и через дополнительный редукционный клапан с источником давления 1. Недостатком этого устройства является .то, что на точность синхронизации .оказывают влияние нестабильная работа редукционных клапанов, имеющих значительный разброс по характеристике, а их регулировка и компенсация влияния разброса характеристик плохо поддаются автоматизации. Наиболее близким техническим решением является устройство синхронизации движения гидроцилиндров, содержащее источник давления, два рабочих гидроцилиндра и компенсирующий гидроцилиндр, соединенный последовательно с одним из рабочих гидроцилиндров 2. Недостатком этого устройства является то, что на точность синхронизации оказывают влияние истинные размеры диаметров цилиндров и штоков всех трех гидроцилиндров, которые имеют разные величины в пределах допуска,, а также то, что размеры компенсирующего гидроцилиндра должны быть одинаковыми с размерами рабочих гидроцилиндров, в результате чего значительно возрастают габариты всего устройства. Кроме того, точность синхронизации снижается за счет объемных потерь в гидроцилиндрах. Цель изобретения - расширение функциональных возможностей устройства и повышение точности синхронизации. Это достигается тем, что шток компенсирую.щего гидроцилиндра соединен через регулируемую кинематическую связь со штоком второго из рабочих гидроцилиндров, к которому компенсирующий гидроцилиндр подсоединен параллельно. На чертеже представлена гидравлическаясхема устройства. Оно состоит из двух гидроцилиндров 1 и 2, источника давления 3, реверсирующего четырехходового распределителя 4 и трех.ходового реверсирующего распределителя 5 для пополнения утечек в гидросистеме, компенсирующего гидроцилиндра 6, обратного клапана 7, двух гидрозамков 8 и 9 и регулируемой кинематической связи 10. Элементы устройства линиями связи (трубопроводами) объедипоиы в единую идросистему.
Источник давления (насос) -3 линией П соединен с подводом четырехходового |)еве|)сируклдего рнсаределигеля 4, который выходом 12 и линией 13 соединен с гюрнпевой полостью цилиндра , линией 14 -- с уиравленпем гидрозамка 8. Второй отвод раснределите.тя 4 линией 5 соединен со штоковой полостью цилиндра 2, а третий - ,1инией 16 с баком.
Трехходовой реверсирующий распределитель 5 линией 17 соединен с источником давления, а лшшей 8 - с баком, его выход 19 линией 20 соединен с подводом к обратному клапану 7, а линией 21 - с управлением гидрозамка 9. Отвод гидрозамка 9 линией 22 соедине:- с баком, подвод 23 л. 24 соединеп с норшпевой полостью гидроцилипдра 2, а Л1пп-1ей 25 -- с подводом к гидрозамку 8. Отвод 26 гидрозамка 8 линией 27 соедппен со iHiOKOBO.; гюлостью гидроппл.индра I, .линией 28 --- с :,1мненсирую1цим ндроцилиндP(JM 6 и Л1н.ией 29 -- с отв()Д(;м обратного клапана 7. Регулируемая кинемат1 ческая связь 10 служ1 т для соединения штока рабочего гидронилиндра 1 с LHTOICOM компенсирую цего : 1дроцмл11ндра 6.
Работает устройство с.тедуюшим образом.
11еобходимо синхронизировать движения двух последовательно соединеп11ых гидроцилинд}М)в, эффективные полости которых имеют произво;(ьные размеры. Для этого со штоком гидроцл.тиндра 1, имеюпито меш-лную эффективную нлон.адь, соединяют ипок компенсиpyioiueio 1идроиилиндра 6 Крез регу.П1руемую кииематическую связь 10, например вариатор рычажную систему с изменяемым (регулируемым) соотношением плеч рыча1ов. От иеточпика давления 3 через, реверсирующий распределитель 4 по линиям 12 и 13 в поршневую нолост гидроцилиндра 1 при включепном электромагните Эм1 подается поток масла под давлением, о.хновременпо этим же давлением но линии 14 гринудительно открывается гидрозамок 8. При двпже){ии норшня гидроцилиндра 1 но стреле А из его пггоковой по,:1ости .масло выдавливается по линиям 27, 26, 25, 24, в иоршневую полость цилиндра 2, заставляя неремеи1,аться его поршень но стрелке Б е определенной скоростью, меньшей скорости движения поршня гидроцилиндра I.
Движение поршня н штока гидроцилиндра 1 вызовет также неремешепие штока компенсируюшегс гидроцилиндра 6 но стрелке В, так как последний связан кинематически со штоком гидроцилиндра 1. Скорость движения плунжера компенсирующего гидроцилипдра 6 зависит от передаточного отношения регулируемой кинематической связи 10 (вариатора или рычажной системы). Поток масла от компенсирующего гидроцилипдра 6 но линиям 28, 26, 25, 24 талже ностунает в поршневую полость гидроцилиндра 2, увеличивая его скорость. Точная дозировка масла, комненсируюП1ая необходпмое из.менение скорости гидро-.
цилиндра 2 и устрапя1оп1ая влияние отличия размеров пилипдро-поршиевых групп гидроцн.липдров в иреде.тах ;к)пуска, обеснеч11ваетс/ ре1улнруемой кинематическсж связью И) ()ычажной системой с рег лнрующим COOTHOHIPнием плеч рычигов и варианто.м), которая позво.пяет рег Л11роват з ве.тпчипу п.отока .масл;. выдавливаемого в рабочую нолоссть гидроцмлиндра 2 из полости кол1пе 1снруюпхего гидроцн.1индра за счет 3 ieпeIП Я скоростн cio движения.
Кроме того, появляется возможпост1, используя сисгему срав ;ения электрических снгна.тов датчиков скоростей д1Л1жепия поршней гкдроцнлиндров, управлять через усилитель исно.1ппте.тьным механизмом, из.меняюшим коэф5 (нщиент пе|)едачи регулг п-емой кинематической связи. Для отвода но(лнней в исходное поло/кепие от1.1ючас-1ся э..1ек1ро.магпит Эм 1 ревсрснрук..; раснределпте,ля 4. Alac.io от пс1оч;: 1КУ дав.чения 3 псктчпает в штоконую полость гндроци.чиндра 2, а из
0 его поршневой нолостп выдавливается в штоковую но.лость г1;дроцп;1И - дра 1 п компенсирующий 1-.идроцплипдр 6, движение которых будет пр01и:ходить по то.му же закону, что и при пря.чом ходе; при .м рсгулируемая ки5нематическая связь 10 выполняет ту же функцию.
В конце хода включается электромагнит Эм2 трехходово1о ревереирующего распределителя 5 для восстановления утечек в замкнутом объеме последовательно соединенных гидг
0 роцнлиндров. При включен.чом электромагните Эм2 .масло от источП1н :а давления 3 по .тиниям 19,21 Г1ринуд1гге,льно откроет гидроза.мок 9, сообгцнв норншевую полость гидрг)цилиндра 2 но лп1П1ям 24, 23, 22 с баком.
Одповременно с иссточнпком давления 3
5 соединяется штоковая гюлость гидроцнлиндра 1 по линиям 19, 20, 29, 27, а поршневая его полость лп}1иями 3, 12, 16 соединена с баком. при это.м кo ileпcиpyюц ий гидрон,н. iHHHn 28 также соединяется с источником . 3.
Механизмы занимают исходное ноложешк: н готовы д.тя HOBTOpiiOio пря.мого хода.
Таким образом, устройство расширяет функциональные возможности установок, так как позволяет просты.м н надежньгм способом не
5 то.тько повысить точность синхронизации, по и обеснечить любое cooTnonieiiJie скоростей движепия гидропилиндроБ, включая равенство скоростей, а также нзмепягь это соотпошение п автоматически поддерживать его в про0цессе движеьия, незавнсимр от утечек и сжатия .масла. Оно может быть использовано в машинах, где рабочий орган, приводимый в движение двумя гидронилиндрами, должен соверпшть как взаи.мпо параллельные перемеш,ения, так и движения, при которых любая сторона могла бы опережать в движении другую сторону этого органа.
Формула изобретения
Устройство синхронизации движения роцилипдров, содержащее источник дав-ления. ли; рабочих гидроцилиндра и комиеисируюций гидроцилиндр, соедннеиный иоследовате.1Ьiio с одним из рабочих гидроцилиндров, отличающийся тем, что, с целью расширения функп.юнггльных возможностей и повышения точпосги синхронизации, шток компенсирующего |идроцили дра соединен через регулируемую кинематическую связь со IJJTOKOM второго из рабочих 1ндроцилиндров, к которому комиенCZbгидроцилнндр присоединен паралсирующиилельно. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР № 407084, кл. F 15 В 11/22, 1974. 2.Богданович Л. Б. «Объемные гидроприводы, Киев, Техника, 1971, с. 120, рис. 73.
