Изобретение относится к эпектрическигл машинам и может быть использовано в быстродействующих бесконтактных электроприводах.
Известны управляемые вентильные эпе&тродвигатели, секции обмотки якоря которых 5 соединены с источником питания через мостовой полупроводниковый коммутатор, а входы ключей коммутатора связаны с выходами датчика положения р отора через логическое устройство 1, И и З.10
Двигатель, описанный в 3J, по решаемой задаче и те шической сущности является наиболее близким к изобретению. Он содержит мостовой полупроводниковый коммутатор, 15 управляющие цепи ключей которого связаны с чувствительными элементами датчика положения ротора с шириной сигнального сектора 180 эл. град, через ;логические элементы Запрет.20
Общим недостатком известных двигателей является низкий уровень динамических показателей, обусловленный тем, что в паузе между управляющими импульсами двигатель тормозится лишь моментом нагрузки, который 25
может быть мал, особенно, в области, блиэкой к холостому ходу.
Целью изобретения является повышение динамических показателей двигателя.
Это достигается тем, что двигатель снабжен дополнительно элементами ИЛИ-НЕ, причем один из входов каждого элемента ИЛИ-НЕ соединен выходами соответствующего элемента Запрет первой руппы, другой вход - с цепью сигнала управления, а выходы соединены с входами соответствующего силового Ключа второй группы.
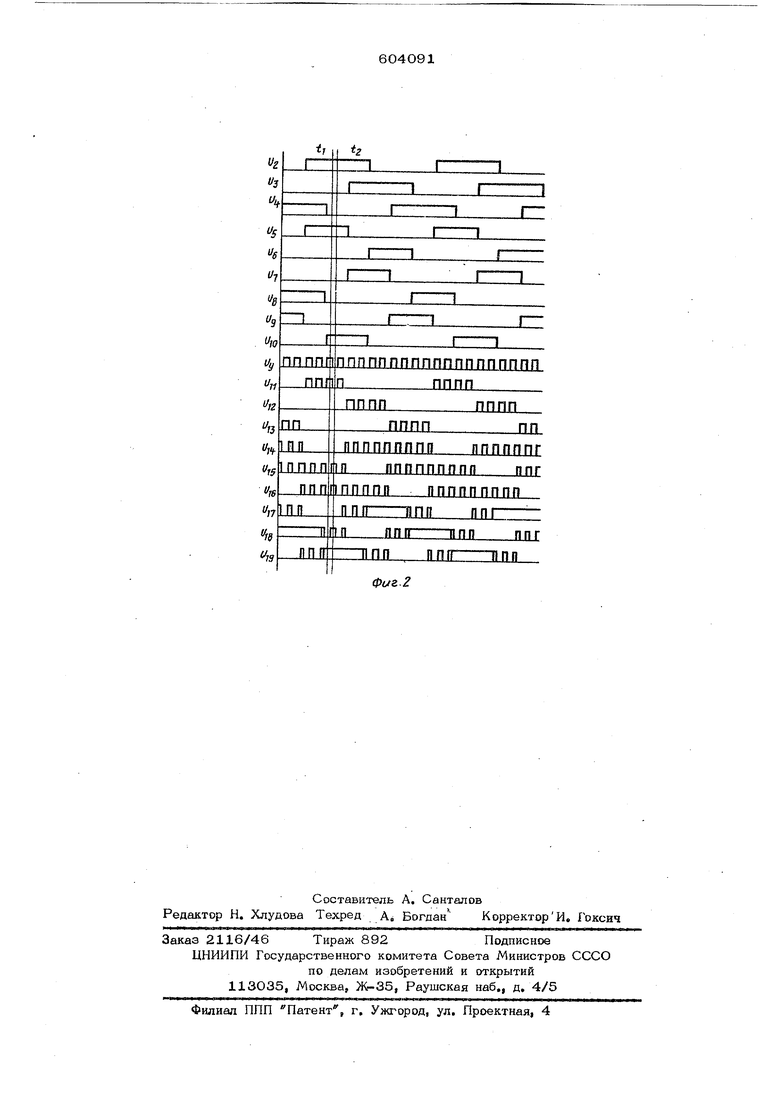
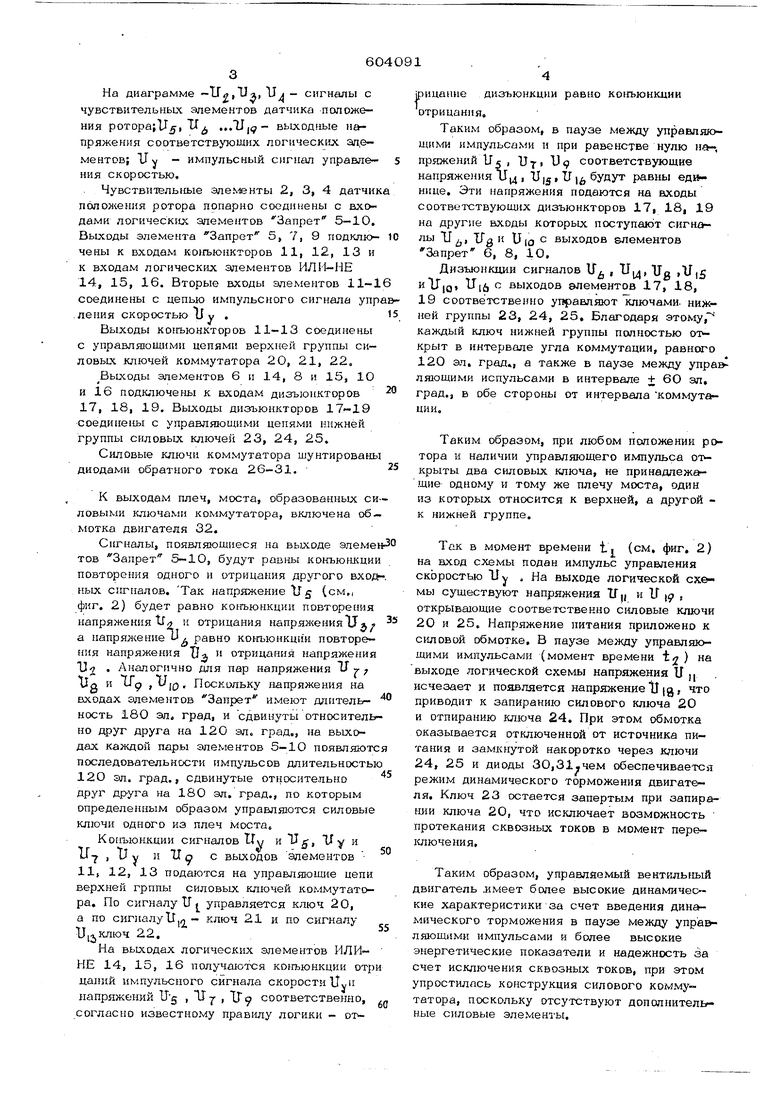
На фиг. 1 представлена схема предлагаемого двигателя, на фиг. 2 - диаграммы работы отдельных элементов схемы двигателя
На фиг. 1 приняты следующие обозначения: 1 - сигнальный сектор якоря датчика положения ротора; 2-4 - чувствительные элементы; 5-1О - логические элементы Запрет, 11-13 - конъюнкторы; 14-16погические элементы ИЛИ-НЕ; 17-19 дизъюнкторы; 20-25 - силовые ключи коммутаторов; 26-31 - диоды обратного тока; 32 - силовая обмотка двигателя. На диаграмме -ISaiU, И - сигналы с чувствительнььх элементов датчика положения poTopajlT i tf ... выходные напряжения соответствующих логических ал.ементов; Uv - импульсный сигнал управления скоростью. Чувствительные эле.юнты 2, 3, 4 датчик положения ротора попарно соединены с входами логическ(1Х элементов Запрет 5-10. Выходы элемента Запрет 5, 7, 9 подключены к входам конъюнкторов 11, 12, 13 и к входам логических элементов ИЛ1-1-НЕ 14, 15, 16. Вторые входы элементов 11-1 соединены с цепью импульсного сигнала упр .ления скоростью iFy . Выходы конъюнкторов 11-13 соединены с управляющими цепями верхней группы сиnoBbLX ключей коммутатора 2О, 21, 22. Выходы элементов 6 и 14, 8 и 15, 10 и 16 подключены к входам дизъюнкторов 17, 18, 19. Выходы дизъюнкторов 17-19 соединены с управляющими цепями нижней группы силовых ключей 23, 24, 25. Силовые ключи коммутатора шунтированы диодами обратного тока 26-31. К выходам плеч, моста, образованных си ловыми ключами коммутатора, включена об - мотка двигателя 32. Сигналы, появляющиеся на выходе элеме тов Запрет 5-10, будут рав11ы конъюьшции повторения одного и отрицания другого вход ных сигналов. Так напряжение Ifg (см,, фиг. 2) будет равно конъюнкции повторения напряжения tr2 и отрицания напряженияЦ а напряжение и равно кo rьюнкшш повторения напряжения Ц отрицания напряжения ТЛ- . Аналогично для пар напряжения TJ г Ug и Up , , Поскольку напряжения на входах элементов Запрет имеют длительность 180 эл. град, и сдвинуты относитель но друг друга на 120 ал. град., на выходах каждой пары элементов 5-10 появляютс последовательности импульсов длительностью 12О эл. град., сдвинутые относительно друг друга на ISO эл. град., по которым определенным образом управляются силовые ключи одного из плеч моста. Конъюнкции сигналов ТГу и U У и IT- , tl у и 11 о с выходов элементов 11, 12, 13 подаются на управляющие цепи верхней грппы силовых ключей коммутатора. По сигналу и j управляется ключ 20, а по сигиалу11,,2 - ключ 21 и по сигналу и|аключ 22. На выходах логических элементов ИЛИНЕ 14, 15, 16 получаются конъюнкции отр цапли импульсного сигнала скоростиUy напряжений 115 9 соответственно, согласно известному правилу логики - от ицанне дизъюнкции равЕю конъюнкции отрицания, Таким образом, в паузе между управляк щими импульсами п при равенстве нулю на-, пряжений lie 1 Ut 9 соответствующие напряжения 11 , ili51 U i, будут равны единице. Эти напряжения подаются на входы соответствующих дизъюнкторов 17| 18, 19 на другие входы которых поступают сигналы 11, Vi jQ С выходов елементов Запрет 6, 8, 10. Дизъюнкции сигналов If , U|, Ug ,1Г, иТГцз tlif) с выходов элементов 17, 18, 19соответственно управляют ключами, нижней группы 23, 24, 25, Благодаря этомуР каждый ключ нижней группы полностью открыт в интервале угла коммутации, равного 120 ап. град., а также в паузе между управ лдаощимн испульсами в интервале + 60 эл, град., в обе стороны от интервала коммутации. Таким образом, при любом положении ротора и наличии управляющего импульса от крыты два силовых ключа, не принадпежа .щие одному и тому же плечу моста, один из которых относится к верхней, а другой к нижней группе. Так в момент времени t, (см. фиг, 2) на вход с.хемы подан импульс управления скоростью If у .На выходе логической сх& мы существуют напряжения 1Гц и IT ( , открывающие соответственно силовые ключи 20и 25. Напряжение питания приложено к силовой обмотке. В паузе между управляющими импульсами (момент времени t ) на выходе логической схемы напряжения U л исчезает и появляется напряжение tl|g, что приводит к запиранию силового ключа 20 и отпиранию ключа 24. При этом обмотка оказывается отключенной от источника питания и замкнутой накфотко через ключи 24, 25 и диоды 30,31.чем обеспечиваете а режим динамического торможения двигателя. Ключ 23 остается запертым при запирании ключа 20, что исключает возможность протекания сквозных токов в момент пере1слючения, Таким образом, управляемый вентильный двигатель .имеет более высокие динамические характеристики за счет введения динамического торможения в паузе между управляющими импульсами и более высокие энергетические показатели и надежность за счет исключения сквозных токов, при этом упростилась конструкция силового коммутатора, поскольку отсутствуют дополнительные силовые элементы.
Формула изобретения
5правляемый вентильный электродвигатель, содержаишй обмотку жоря, соединенную с источником питания через мостовой попупро- 5 водниковый коммутатор, каждому силовому ключу анодной и катодной группы которого соответствует логический элемент Запрет, причем элементы Запрет образуют пераую и вторую группы, входы силовых ключей10
первой, например, анодной группы полупроводникового коммутатора связаны с. выходами первой группы логических элементов Запрет, входы второй группы силовых ключей - с выходами второй группы элемента Запрет , 15 а входы элементов Запрет, относящихся к ключам одного плеча коммутатора, связаны с чувствительными элементами датчика поло-. жения ротора с углом сигнального сектора
180 эл, град., и цепь импульсного сигнала управления, отличающийся тем, что, с целью повышения динамических показателей, он снабжен дополнительно логическими элементами , причем один из входов каждого элемента ИЛИ-НЕ соединен с выходами соответствующего элемента Запрет первой группы, другой вход - с цепью сигнала управления, а выходы соединены с входами соответствующего силового ключа второй группы,
Источники информации, принятые во внимание при экпертизе:
1.Патент США № 3.783.359, кл. 3181254, 1973.
2.Патент Японии № 46-31692, кл. кл. 55 А 42, 1971.
3.Патент США № 3581.702, кл. 318138, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Управляемый вентильный электродвигатель | 1976 |
|
SU741383A1 |
| Реверсивный вентильный электродвигатель | 1975 |
|
SU663036A1 |
| Стабилизатор переменного напряжения | 1982 |
|
SU1026123A1 |
| Вентильный электродвигатель | 1974 |
|
SU663034A1 |
| Способ управления высокоскоростным бесконтактным двигателем постоянного тока | 1974 |
|
SU660159A1 |
| Управляемый вентильный электродвигатель | 1977 |
|
SU668047A1 |
| УСТРОЙСТВО ВЫПОЛНЕНИЯ ЛОГИЧЕСКИХ ОПЕРАЦИЙ | 2005 |
|
RU2288500C1 |
| Вычислительный модуль логических операций | 2019 |
|
RU2716026C1 |
| Устройство для программирования микросхем памяти | 1986 |
|
SU1381592A1 |
| Вентильный электродвигатель | 1976 |
|
SU650170A1 |