(54) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ
ВОЗБУЖДЕНИЯ СИНХРОННОГО ДВИГАТЕ..ПЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с синхронным двигателем | 1976 |
|
SU603082A2 |
| Электропривод с синхронным двигателем | 1975 |
|
SU809460A2 |
| Электропривод с синхронным двигателем | 1976 |
|
SU615583A2 |
| Устройство для управления электроприводом переменного тока | 1980 |
|
SU983958A1 |
| Устройство для автоматического регулирования тока возбуждения синхронного двигателя | 1989 |
|
SU1663728A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1973 |
|
SU517126A1 |
| СПОСОБ УПРАВЛЕНИЯ ТОКОМ ВОЗБУЖДЕНИЯ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2239936C2 |
| Регулируемый электропривод с асинхронизированным синхронным двигателем | 1972 |
|
SU490247A1 |
| Электропривод с регулированием активной и реактивной энергии от сети ограниченной мощности | 1975 |
|
SU699644A1 |
| Электропривод с синхронным двигателем | 1974 |
|
SU658690A1 |
Изобретение касается металлургического электропривода, в частности автоматического регулирования возбуждения сетевых синхронных двигателей, работающих с резко переменной нагрузкой на валу, например, С1П1хрониых двигателей прокатных станов.
Известны системы автоматпческо|-о регу:1ирования, которые воздействуют па реактивную соста ляюа1ую тока статора синхронного двигагеля и тем самым улучн ают некоторые тех||ико-эконо п1ческие показатели сипхронного двигателя и гштающей установки 1.
Недостатком этих систем является то, чтс) они не повышают д1И)ампческой устойчивости, синхроиного двигателя при кратковремеиных ударах нагрузки.
Известны устройства автоматического регулирования возбуждения синхронного двигателя, которые содержат как контуры регу.чированпя активного и реактивндго токов статора, так и тока возбуждении ротора и напряже1П1Я сети 2. Ие.Юстатком этих устройств яв.чяется слабое демпфирование качаннй ротора синхронного дви1ателя.
Целью изобретения яв.;|яется улучиюнне (|)ирования качаний ротора синхропно-о Д15И ателя.
Это дости1ается тем, чго li иред.юженнос устройство введен блок коррскц 1 о-;ффг:И1КНтов нс-редачи контуров peiA.iiipoBainisi активного ч реактивного гоков 1.,;то)а, BX)..i.,i irvciрого |10дклк)чены к контурам ре -улирования тока статс ра к датчикам i; наиряжения стетопа .двигателя, при Я)тол; И)1лОД1)1 VToro б. ioка подключены к контуру рчм -лироп;л 1я тока и()зб ждення.
Б.юк кор 5екнин может состоять из ис.Hiiitib кого элемента с синусоида.ibiion xapai icp:icTHKoii с элементом лиоячения на ,и . пе. 1иlieiiHoro элемента с косинусоида.тиНой xapaixfc рнстикой с элементо.м у.хпюжения на выходе, датчика yi.ia , выход когорого нодключ(.-н ко входам уномя1|уп 1х не.ишейных э.тс-меитов. н|;)и этом элемент )Жения с iic.iii.иеЙ1и.М э.:1е 1енто ; с синхсои щ. ;ipai Teрнст1н ой нрсд азначеп д.мя вклмчепня ii uoi; тур регулнрования актнвного т(1ка статора, i элемент умножения с ислилтейным элеметчл: с косинусоидальиой характеристикой - д,1я вк.почения в контур регу.:и1ро; апия j)eaKTii;;iH)IO тока статора.
,1.1и обеснече)П1я астатического pcryiHpoвани-/; ;:1еактивно|-о тока статора в контхр регу1и;1)в;1мия активного тока cvaTOjui, С.1Д.;;|-j
ший пропорциональный регулятор активного тока, введены усилитель, датчик с регулятором скольжения, выход которого нодключен ко входу регулятора активного тока, а входы нодключены к выходам датчика скольжения и вновь введенного усилителя, при этом вход последнего соединен с выходом регулятора тока.
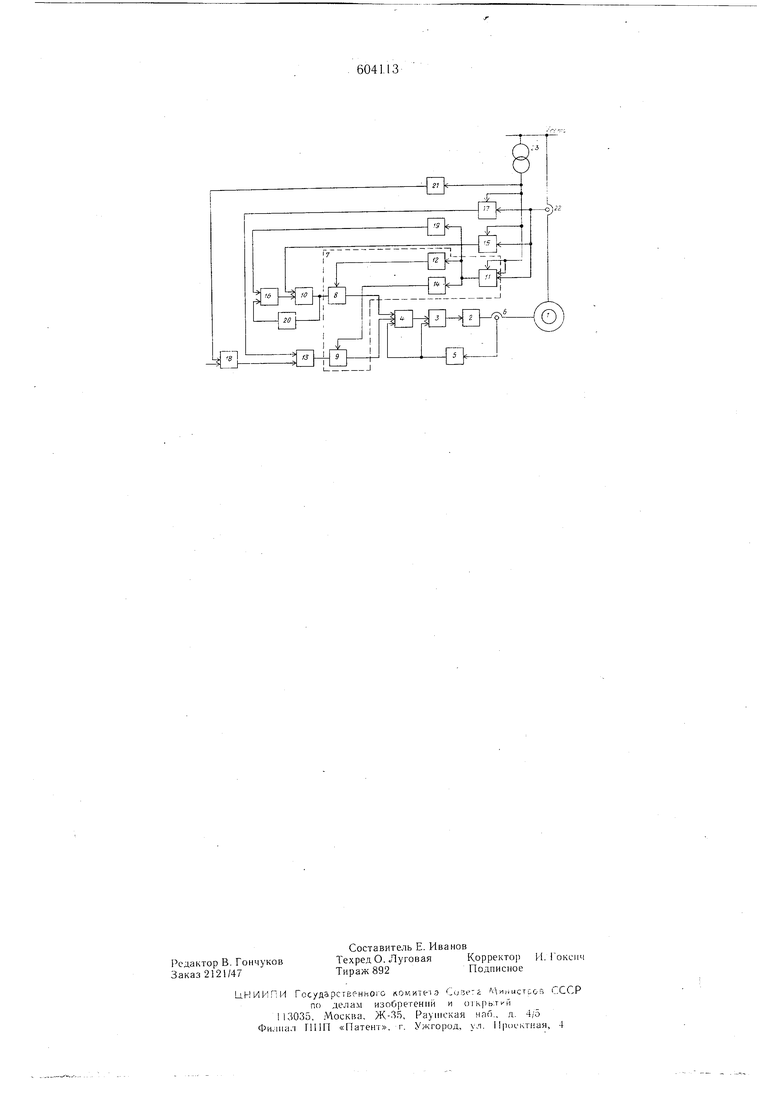
На чертеже нредставлена функциональная схема предложенного устройства д.ля регулирования возбуждения синхронного двигателя.
Обмотка возбуждения синхронного двигателя 1 нитается от тиристорного возбудлтеля 2. Задающий вход тиристорного возбудителя подключен к пропорционально-интегрально-дифференциальному регулятору 3 продольного тока статора. К задающе.му входу регулятора продольного тока статора нодключен элемент ограинчения 4, посредством которого осуп1ествляется ограничение тока возбуждения синхронного двигателя сверху и снизу. Ко входу обратной связи регулятора продольного тока подключена цепь отрицательной обратной связи по току возбуждения синхронного двигателя, состоящая из датчика 5 тока возбуждения и шунта 6. К дополнительному Езходу элемента ограничения 4 подключена цепь положительной обратной связи по току возбуждения, содержащая ;1атчик 5 и шунт 6, которая компенсирует отрицательную обратную связь ио току возбуждения на входе регуля.тора продольного тока, когда ток возбуждения находится в заданном диапазоне.
Ко входам элемента ограничения 4 подключается выход блока коррекцни 7. Основиыми узлами блока коррекции являются множительные элементы 8, и 9. Ко входам множительного элемента 9 подключены пропорциональный регулятор активного тока 10 и выход .датчика 11 внутреннего угла синхронного двигателя через нелинейный элемент 12, имеющий синусоидальную характеристику. Ко входам множительного элемента 9 подключены пропорциональный рег лятор 13 реактивного тока и выход датчика 1 i внутреннего угла через нелинейный элe.vтeнт 14, и.меющий косинусоидальную характеристику.
Ко входам регулятора 10 активного тока подключена цепь отрицательной обратной связи по активной составляющей тока статора синхронного двигателя, содержащая датчик 15 активного тока, и выход г роиорциона;пьно-интегрального регулятора скольжения 16. Ко входам регулятора 13 подключены датчик 17 реактивного тока и регулятор 18 напряжения. К одному входу регулятора скольжения 16 подключена цепь отрицательной обратной связи, содержащая датчик скольжения 19. К другому входу регулятора 16 подключена цепь отрицательной обратной связи, содержащая усилительинвертор 20, вход которого соединен .с выходом регулятора 10. К одному входу регулятора напряжения 18 подключен задатчик сигнала задания, к другому - цепь отрицательной обратной связи, содержащая датчик напряжения 21. Датчики тока и напряжения 22 и 23 подключены к блокам 11, 15, 17 и 21. Питание устройства осуществляется от Сети.
Датчики 15 и 17 активной и реактивной составляющих тока статора построены по принципу выпря.мления с по.мошью фазочувствительного усилителя. Коммутирующее напряжение фазочувствительного усилителя синфазно с фазным напряжением при измерении активной составляющей тока и отстает на 90 эл. град от фазного напряжения при измерении реактивной составляющей. Датчик 11 внутреннего угла 0 синхронного двигателя представляет собой фазочувствительный усилитель, на входы которого вводятся два напряжения: опорлое, представляющее собой сумму двух напря.жений, (напряжение, пропорциональное напряжению сети и пропорциональное току статора) и напряжение на измерительном входе, пропорциональное напряжению сети.
В это.м случае, с некоторыми допущениями напряжение на выходе датчика. 11 пропорционально углу .между ЭДС за поперечной реактивностью и напряжением сети. Этот угол близок к рабочему углу синхронной мащины &.
Сигнал, пропорциональный скольжению, получается после дифференцирования напряжения с выхода датчика угла нагрузки П.
Устройство работает следующим образом.
Результирующий сигнал, подаваемый на вход регулятора продольного .тока 3, определяется выражением (i;,j-ij)cos0 + (i«..)siTi© ij, ( I )
где ij - продольная составляющая тока статора;
if,, ia - реактивная и активная составляющие тока статора;
iff, lag - заданные значения реактивной и активной составляющих тока статора синхронного двигателя;
lay - заданное значение продольной составляющей тока статора синхронного двигателя.
Таким образом, посредством возбуждения синхронного двигателя ведется регулирование продольной составляющей тока статора.
При отсутствии нагрузки на валу активная составляющая тока статора и ее задание равны нулю. Фактическое значение реактивной составляющей тока статора равно заданному, выходной сигнал регулятора 13 реактивного тока равен нулю.
За счет интегральной составляющей части пропорционально-интегрально-дифференциального регулятора 3 продольного тока продольная составляющая тока статора синхронного двигателя равна заданному значению реактивного тока.
При наличии нагрузки на валу синхронного двигателя, за счет отрицательной обратной связи по выходу регулятора 10 активного тока, подаваемый на регулятор скольжения 16 выходной сигнал регулятора активного тока равен нулю, выходной сигнал пропорциональноинтегрального регулятора 16 скольжения, за счет интегральной части, равен фактическо.му значению-активной составляющей тока статора синхронного двигателя.
Интегральная часть пропорционально-интегрально-дифференциального регулятора 3 продольного тока обеспечивает такую величину продольной составляющей тока статора синхронного двигателя независимо от нагрузки, что фактическое значение реактивной составляющей тока статора равно заданному и выходной сигнал регулятора 13 реактивного тока равен нулю.
Такое построение системы подчиненного регулирования возбуждения синхронного двигателя обеспечивает астатическое регулирование реактивного тока.
Динамику работы синхронного двигателя при набросах и сбросах нагрузки с предлагаемой системой подчиненного регулирования возбуждения определяют следующим образом.
Для выбора передаточных функций регулято ров применяют общие методы синтеза системы подч иненного регулирования с последовательной коррекцией. Посредством возбуждения регулируют активную и реактивную составляющие тока статора синхронного двигателя согласно их влиянию на продольную составляющую тока в соответствии с выражением 1.
В результате при наличии нагрузки на валу предпочтение отдается регулированию активной составляющей тока статора, а в режиме холостого хода - реактивной составляющей тока. Такое регулирование соответствует физической сущности синхронного двигателя с обмоткой возбуждения по продольной оси. Поэтому переходные процессы при набросах нагрузки (по активной составляющей тока и скольжению синхронного двигателя) приближаются по характеру к переходным процессам, имеющим место в приводах постоянного тока с системами подчиненного регулирования. Колебания ротора и активной составляющей тока статора синхронного двигателя существенно задемпфированы. Отклонения реактивной составляю цей тока статора синхронного двигателя от заданного весьма незначительны. При сбросах нагрузки реактивная составляющая тока статора практически поддерживается на заданном уровне, колебания ротора несколько задемпфированы. Кроме того, регулирование по активной составляющей тока цепи статора искольжению синхронного двигателя повыщает его динамическую перегрузочную способность до максимально возможной.
Предложенное устройство для регулирования возбуждения синхронного двигателя наряду с выдачей экономически выгодной величины реактивной мощности и стабилизацией напряжения питающего узла нагрузки по величине позволяет уменьщить качания ротора в переходных режимах, увеличить динамическую устойчивость синхронного двигателя при ударах нагрузки на валу, уменьщить колебания частоты напряжения питающего узла нагрузки, т. е. стабилизировать напряжение по фазе.
Формула изобретения
. 3. Устройство по пп. 1 и 2, отличающееся тем, что, с целью обеспечения астатического регулирования реактивного тока статора, в контур регулирования активного, тока статора, содержащ.ий пропорциональный регулятор активного тока, введены усилитель, датчик и регулятор скольжения, выход которого подключен ко входу регулятора активного тока, а входы - к выходам датчика скольжения и усилителя, при этом вход последнего соединен с выходом регулятора тока.
Источники информации, принятые во внимание при экспертизе:
1 Петелин Д. П. Автоматическое управление синхронными электроприводами, М., «Энергия, 1968, с. 89-102, 117-134.
