(54) ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ
держания основного потока, поэтому для двухзонного регулирования скорос ти применимо комбинированное регулирование поля возбуждения: с поддержанием полного потокосцепления статора в зоне ослабления и ограничением основного потока в зазоре.
Целью настоящего изобретения является улучшение регулировочных харакч тёристик при двухзонном регулировании скорости.
Поставленная цель достигается Tejy) что предлагаемое вычислительное устройство выполнено в виде трех решающих блоков, входы третьего из кот рых подключены-К - блоку регулирования скорости, а выходы - к первому и второму решающим блокам, причем второй решающий блок подключен входами и выходами к первому, а выходами с сигналами, пропорциональными гармоническим функциям угла между осью потока и продольной осью машины, - к соответствующим.входам первого и третьего решающих блоков; третий решающий блок содержит координатный преобразователь, два нелинейных элементна и элемент деления, вход делимого которого подключен к выходу блока регулирования скорости с заданием момента, а выход - к первому решающему блоку и через первый из нелинейных элементов с характеристикой усилительного звена с регулируемым органичением - к одному HJ вхбдов координатного преобразователя, при этом вход делителя элемента деления, второй вход координатного преобразователя и вход второго нелинейного элемента с характеристикой типа квадратного корня подключены к выходу блока регулирования скорости с заданием потокосцепления, а третий и четвертый входы координатного преобразователя подключены ко второму решающему блоку.
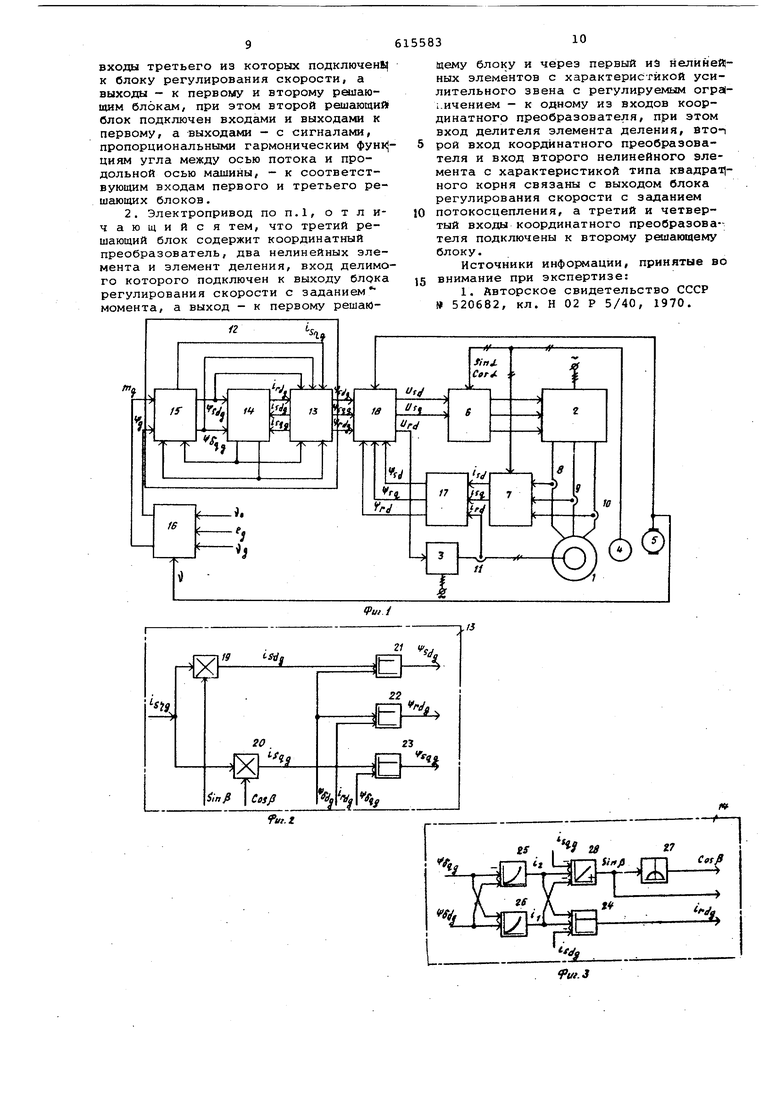
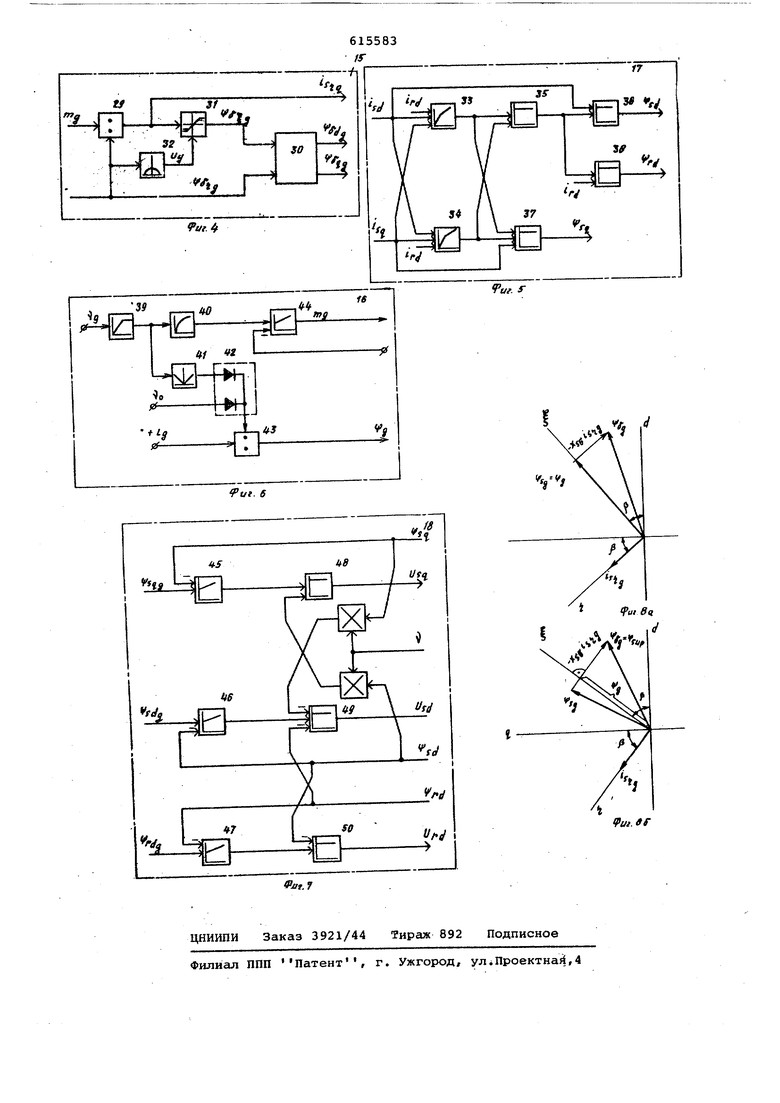
На фиг. 1 представлена структурная схема системы регулирования; на 1)ИГ. 2 - первый решающий блок; на фиг. 3 - второй решающий блок; на фиг, 4 - третий решающий блок; на фиг, 5 - блок формирования действительных потокосцеплений; на фиг. 6 - блок регулирования скорости; на фиг. 7- блок регуляторов потокосцеплений; на фиг. 8 а,б - векторная диаграмма синхронного двигателя.
Предлагаемый электропривод содержит синхронный двигатель 1, тиристор ный преобразователь 2 частоты, тириЬторный возбудитель 3, датчик 4 положения, датчик 5 скорости, координатный преобразователь 6 от продольной и поперечной к фазовым компонентам, координатный преобразователь 7 от фазовых к продольной и поперечной компонентам, датчики 8-11 токов статора и ротора, вычислительное устройство 12, первый решающий блок 13,
второй решающий блок 14, третий реиаюший блок 15, блок 16 регулирования скорости, блок 17 формирования действительных потокосцеплений, Ллок 18 регуляторов потокосцеплений, умног жители 19 и 20, усилительные элементы 21-24, нелинейные элементы 25-27, интегрирующий элемент 28, делительный элемент 29, координатный преобразователь 30, нелинейные элементы 31-34, усилители 35-38, задатчик 39
0 интенсивности, фильтр 40, нелинейные элементы 41 и 42, делитель 43, регуляторы 44-47 скорости и потокосцепления и усилители 45-50.
В предлагаемом электроприводе обмотки фаз статора синхронного двигателя 1 подключены к тиристорному npeiобразователю 2 частоты, а обмотка возбуждения синхронного двигателя 1 подключена к тиристорному возбудителю 3. На валу ротора двигателя 1 имеется датчик 4, углового положения с выходными сигналами,пропорциональными тригонометрическим функциям углового положения ротора, и датчик 5
скорости.
Управляющие входы преобразователя. 2 связаны с выходами координатного преобразователя 6, который состоит из типовых множительных и суммирующих элементов и реализует прямое преобразование.
На входы координатного преобразователя 6 подключены выходы датчика 4 углового положения и выходы блока 18 регуляторов потокосцеплений
5 {фиг.1), состоящего из интегропропорционапьных регуляторов 45-47 (фиг.7) продольной и поперечной составляющих потокосцеплений статора и ротора и суммирующих усилителей 48-50 для ком0. пенсации перекрестных связей (фиг.7). Сигналы задания на регуляторы 45-47 пос.тупают с блока 16 через вычислительное .устройство 12.
Обратные связи по поперечной и
5 продольной составляющим.потокосцепления статора и ротора подаются с выхода блока 17 формирования действительных значений потокосцеплений (фиг.1), входы которого связаны с выходами ординатного преобразователя 7 и датчиками 8-11 тока ротора. Координатный преобразователь 7 состоит из типовых умножителей и суммирующих элементов и реализует преобразование (обратное).
Блок 16 регулирования скорости (фиг.1). включает в себя регулятор 44 скорости (фиг.6), делительный элемент 43 и нелинейные элементы 41 и 42. На вход регулятора 44 подается сигнал задания с выхода задатчика 39 интенсивности через фильтр 40-и сигнал отрицательной обратной связи по скорости с выхода датчика 5 скорости. Первый решающий блок 13 реализуется при помощи умножителей 19 и 20 и
усилительных элементов 21-23 (фиг.2) второй решающий блок 14 обеспечивает учет насыщения магнитной цепи двигателя 1 при формировании заданных значений потокосцеплений (фиг.З), а третий решающий блок 15 (фиг.14) формирует заданные значения составляющих потокосцеплений воздушного зазора и обеспечивает плавный переход of режима с поддержанием полного потокосцепления статора на поддержание основного потока с ограничением последнего на заданном уровне в зависимости от величины нагрузки и заданного потокосцепления.
Третий решающий блок 15 (фиг.1) содержит координатный преобразовател 30 (фиг.4), делитель 29 и два нелинейных элемента 31 и 32.
Блок 17 формирования действительных потокосцеплений (фиг.5) формирует сигнал обратных связей с учетом насыщения магнитной цепи.
При наличии нагрузки на валу двигателя 1 имеется сигнал задания момента тп на выходе регулятора скорости . При заданной скорости , двигателя i ниже основной скоростиУ
о
-I С1
--t
т.е. система регулирования заданную
величину потокосцепления поддержива ет постоянной, la co-nst . При скорое ти привода выше основной
Г -1±
заданная величина потокосцепления sfC изменяется обратнопропорционально за данной скорости.
Выход делителя 29 ( j определяет проекцию тока статора на ось v|
(фиг. 8) тяя
1
19 i
Нелинейный элемент 31 настраивается таким образом, что его выход определяет проекцию основного потока
Т на ось Т 4«j ,
I frn
,
- максимальная величина осгде:
f новного потока rij. - реактанц рассеяния статора.
Проекция основного потока 5k на ось определяется заданной величиной потокосцепления
.
Г
Нелинейный элемент 32 настраивается так, что его выхс дной сигнал
определяет напряжение управления Uy нелин ейным элементом 31.
и - «г
Jy .р -3
Таким образом, в случае поддержания полного потокаГд, проекции основного потока fy и ЧЧ определяются (фиг.8,а) Ц I
X
д
т Ч
%
(Г,
h
с увеличением нагрузки, если
/X i / vjri % ST.- )
то система регулирования обеспечивает режим работы с ограничением основного потока Т , т.е. составляющие основного потока по осям ( , )
определяются
Г .Ут -Yi
°Па Р Ч
20
Далее составляющие основного потока по осям ( . ) поступают в координатный преобразователь 30, который состоит из типовых множительных и суммирующих элементов и осуществляет переход из осей потока (t, & ) в оси ротора ( cL, а ) по следующим соотношениям
,
Т
-vrjb+re.cobf. Выходные сигналы координатного преобразователя 30 поступают на входы нелинейных элементов 25 и 26, имеющие одинаковые характеристики и определяющие зависимость результирующей силы от основного потока для данного синхронного двигателя,
.ГЧг)Относительный поток одной полови- ны полюса Ttq. определяется суммой составляющих основного потокосцепле- ния, а другой . - разностью, т.е.
% -Ч, ,
Выходы нелинейных элементов 26 и 27 соответствуют намагничивающим силам (н.с.) половин полюса i
Г
.j f Cii) ч -ГЧгг)
Связь H.c.t,a, составляющими н.с по продольной и поперечной осям определяется зависимостями id,-0.5 (1,.4)
ЧГ° а-Ч,).
Составляющая н.с по оси cL опреде ляется суммой н.с от составляющих тока статора по осис1 и тока ротора .Масштабы, по входам усилительного элемента 24 выбраны так, что его вы ход определяет заданный ток ротора d, ,Mg и поступает на вход усилительного элемента 22 первого решающего блока Связь составляющей и.с по оси 4. с .составляющей тока статора по же оси определяется где mflL 1-7 ненасыщенные значения реактивной взаимоиндук ции статора- и ротора п осям d,cj. Масштабные коэффициенты на входа усилительного элемента 28 выбираются таким образом, что суммарный сиг нал на выходе элемент-а 28 опрвдвляет stn где f - угол между осью потока и продольной осью; - постоянная интегрирования. Выход нелинейного элемента 34 определяет и поступат на вход вычислительного устройства 12 усилителя 15. Составляющие токов статора igj -t определяются г - ic sin ft, Sdg Ht 4, 1 Масштабные коэффициенты на входа усилительных элементов 21-23 выбира ются таким образом, что суммарный сигнал на выходах составляет на вых де усилительного элемента 21 Па . . Га f -d - на выходе усилительного элемента 22 на выходе усилительного элемента 23 s. - я «- х -л, П 5 где - реактанц -рассеяния обмот ки ротора. Полученные сигналы заданных значений потокосцеплений статора и poT ра подаются на входы блока 18 регулирования потокосцеплений (фиг.7). Формирование действительных пото косцеплений осуществляется в блоке 17 формирования действительных пото косцеплений (фиг.6). Нелинейные элементы 33 и 34 име.ют одинаковые характеристики и опре деляют зависимость основного потока Y от .результирующей намагничивающе силы 1 , т.е. y,f Ci) Намагничивающие силы-i i одной полосы определяются суммой н.с о продольной и поперечной осям (фиг.5) ,,i,J. ЪА Гс1 другой н.с. . ij разностью тпа V JTHM намагничивающим силам соответтвуют потокосцепления т , TJ т.е. ыходы нелинейных элементов 33 и 34 ). .ЧгМСч).сл1табные коэффициенты на Bxoflatx силителей 35-38 выбираются таким бразом, что суммарные сигналы на ыходах этих усилителей определяются ыражениями J4-0,5(r,rJ, .S(r,-r)-X г, а s.r г т, га а -de- d при этом выходы усилителей 36-38 подключены к входам блока 18 регуляторов потокосцеплений в качестве обратных связей. В установившемся режиме заданные и действительные значения потокосцеплений равны. За счет интегральных составляющих на выходах регуляторов 45-47 вырабатывается необходимый сигнал, обеспечивающий на статоре синхронного двигателя напряжение, требуемое для поддержания заданного момента тпп. и скорости Vij,, а напряжение на обмотке возбуждения обеспечивает заданную величину потока Tij.. Динамика предлагаемого электропривода обеспечивается соответствующим выбором передаточных функций регуляторов потокосцеплений, регулятора скорости и компенсации внутренних перекрестных связей. Предлагаемая система регулированияобеспечивает двухзонное регулирование скорости с комбинированным регулированием возбуждения: с поддержанием полного потокосцепления статора и ограничением основного потока в зазоре. Формула изобретения 1. Электропривод с синхронным двигателем по авт.св. 520682, отличающийся тем, что, с целью улучшения регулировочных характеристик при двухзонном регулировании ско рости, вычислительное устройство выполнено в виде трех решающих блоков,
входы третьего из которых подключен к блоку регулирования скорости, а выходы - к первому и второму решающим блокам, при этом второй решающи блок подключен входами и выходами к первому, а выходами - с сигналами, пропорциональными гармоническим функ|циям угла между осью потока и продольной осью машины, - к соответствующим входам первого и третьего решающих блоков,
2. Электропривод по п.1, отличающийся тем, что третий решающий блок содержит координатный преобразователь, два нелинейных элемента и элемент деления, вход делимого которого подключен к выходу блока регулирования скорости с заданием момента, а выход - к первому решающему блоку и через первый иЭ нелиней ных элементов с характеристикой усилительного звена с регулируемым огра(;.ичением - к одному из входов координатного преобразователя, при этом вход делителя элемента деления, втоп
рой вход координатного преобразователя и вход второго нелинейного элемента с характеристикой типа квадрат ного корня связаны с выходом блока регулирования скорости с заданием
потокосцепления, а третий и четвертый входы координатного преобразователя подключены к второму ретиающему блоку.
Источники информации, принятые во
внимание при экспертизе:
1. Авторское свидетельство СССР 520682, кл. Н 02 Р 5/40, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с синхронным двигателем | 1976 |
|
SU603082A2 |
| Электропривод с синхронным двигателем | 1975 |
|
SU809460A2 |
| Устройство для управления электроприводом переменного тока | 1980 |
|
SU983958A1 |
| Способ управления электроприводом переменного тока и устройство для его осуществления | 1976 |
|
SU656175A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Электропривод с асинхронной машиной с фазным ротором | 1973 |
|
SU517126A1 |
| Электропривод с асинхронным короткозамкнутым двигателем | 1976 |
|
SU615584A1 |
| Устройство для компенсации эдс в синхронном частотно-управляемом электроприводе | 1974 |
|
SU688976A1 |
| Система электроснабжения узла нагрузки | 1981 |
|
SU1103324A1 |
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |
L.
w.J
