1
Изобретение относится к промышленному регулируемому электроприводу с частотноуправляемым синхронным двигателем сред., ней и большой мощности с высокими требо ваниями к качеству и диапазону регулв-т рования cKopcJcTH.
Преимушественные области применения изобретения; главные приводы прокатных станков, летучие гильотинные ножницы, нажимные устройства, линейные манипуляторы. моталки.листопрокатных етанков и другие механизмы черней и цветной металлургии, где требуется вьюокая перегрузочная способность электропривода, а также шаровые помольные мельницы в цементной и гopнoдoбывающей промышленности, где требуется большая мощность приводньпс двигателей,
По основному авт. св. М 520682 известен электропривод с синхронным двигателем содержащий блок обратного преобразования с выходами сигналов поперечной и продольной составляющих тока статора, два пропорционально-ингегральных регулятора поперечной и продольной составляющих тока статооа блок извлечения кавадратного корня, блок
Еозведения в квадрат и В|-лчислнтельное устройст§,р, вход кот-орого подключен к регуля-тору скорости, а его выходы сигналов управления поперечной и продольной составляющих тока статора соединены с блоком прямого пробразования через соответствующие пропорционально-интегральные регуляторы, к вко, дам которых подсоединены соответствующие вькоды блока обратного преобразования,- вход которого подключены к датчикам тока статора и формирователю гармонических функций, при этом выход сигнала продольной сооугавляющей тока статора блока обратного преобразования соединен также с регулятором возбуждения, один из входов которого подключен к вьгходу сигнала управления поперечнойсоставляющей тока статора вычислительного устройства через блоки извлечения квадратного корня и возведения в квадрат, а другой вход подключен к выходу сигнала управления продольной составляющей тока статоравычислительного устройства. Этот электропривод построен в пренебрежении насьядением Магнитной цепи синхронного двигателя.
.Целью изобретения является повьпиение качества регулирования при насыщенной магнитной цепи двигателя. Это достигается тем что в предлагаемом электроприводе вьяислительное устройство вьтолнено в виде двух решающих блоков, вход второго из которых подключен к первому решающему блоку и блоку регулирования скорости, а выход - к первому решающему блоку, при этом каждый из формирователей продольной и поперечной составляющих потокосцепления статора содержит на входе нелинейный элемент с характеристикой зависимости основного потока от результирующей намагничивакжей силы, подключенный к выходам блока обратног преобразования по продольной и попе{#ечной coтавляюшим тэк-д статора и к датчику тока рото
Второй решающий блок содержит два нелинейных элемента с характеристиками зависимости результирующей намагничивающей силы от основного потока, один из которых включен в замкнутый контур с интегрирующим элементом и умножителем, а другой последовательно с усилительным элементом при этом входы второго нелинейного, интегрирующего и усилительного элементов, а также выходы умножителя и усилительного элемента подключень) к первому решающему блоку, второй вход умножителя - к блоку регулирования скорости, а входы нелинейных интегрирующего и усилительного элементов связаны между собой перекрестными связями.
Па фиг, 1 представлена структурная схема системы регулирования описываемого электропривода} на фиг. 2 - блок регулирования скорости} на фиг. 3 - первый решающий блок; на фиг, 4 - второй решающий блок; на фиг, 5 - блок регуляторов, потокосцеплений; на фиг. в - блок формирования действительных потокосцеплений; на фиг, 7-i упрощенная картина магнитного поля синхронной машины.
Электропривод .содержит синхронный авигатель 1, тиристорный преобразователь частоты 2, тиристорный возбудитель 3, д&тчики 4 и 5 углового положения и скорости, соответственно координатный преобразователь б от продольных и поперечньтх к фазовым компонентам, координатньЛ преобразователь 7 от фазовых « продольным и поперечным компонентам, датчики 8 - 11 токов статора и ротора, вьяислительное устройство 12, вьшолнённое в вице двух решающих блоков 13 и 14, блок 15 регулированияя скорости, блок 16 формирования действительных потокосцеплений, блок 17 регуляторов пбтокосцеплений, делительный элемент 18, умножители 19 - 21, нелинейньте 22 - 25, усилительные 26 - 29 и интегрируюший 30 элементы, задатчик интенсивности 31, фильтр 32, регулятор скорости 33, делительный элемент 34, нелинейные 35 - 3 и усилительные 40- 43 элементы, регуляторы потокосцеплений 44 - 46, усилительные элементы 47 - 49 и умножители ВО и 51.
В описьюаемом электроприводе обмотки фаз статора синхронного двигателя 1 подключены к тиристорному преобразователю частоты 2, а обмотка возбуждения - к тиристорному возбудителю 3, На валу ротора двигателя имеется датчик 4 углового положения, выходные сигналы которого пропор1 хшональны тригонометрическим функциям углового положения ротора. Кроме того, на валу двигателя установлен датчик 5 скороти.
Управляющие входы тиристорного преобразователя частоты 2 связаны с выходами координатного преобразователя 6, который состоит из типовых множительных и суммирующих элементов и реализует прямое преобразование.
Сигналы задания на регуляторы, потокосцеплений поступают с блока 15 регулирования скорости через вьяислитепьное устройство 12, включающее в себя первый 13 и второй 14 решаюшие блоки.
Обратные связи по поперечной и продольной составлякщим потокосцепления статора и ротора подаются с выхода блока 16 формирования действительиьтх аначений потокосцеплений, входы которого связаны с выходами координатного преобразоватепя 7 и датчиком 11 тока ротора, КоординатньА преобразователь 7 состоит из типовьк множительных и суммирующих элементов и реализует обратное преобразование.
На входы преобразователя 6 подключены вьпсоды датчика 4 урп.ового ло.лонсения и блока 17 регуляторов дбт;окосцепленнй,
БЛОК 17 СОСТОИТ . 83 пропорйионайьноинтегральных регуляторов продольной и поперечной составлнюших потокосцеплений статора и ротора, а также из суммирующих усилителей для компенсации перекрестных свяэей.
Первый решающий блок 13 (см, фиг, 3) реализуется при помощи двух умножителей 19 и 20, одного делительного 18, двух нелинейных 22 и 23 и трех усилительных элементов 26-28.
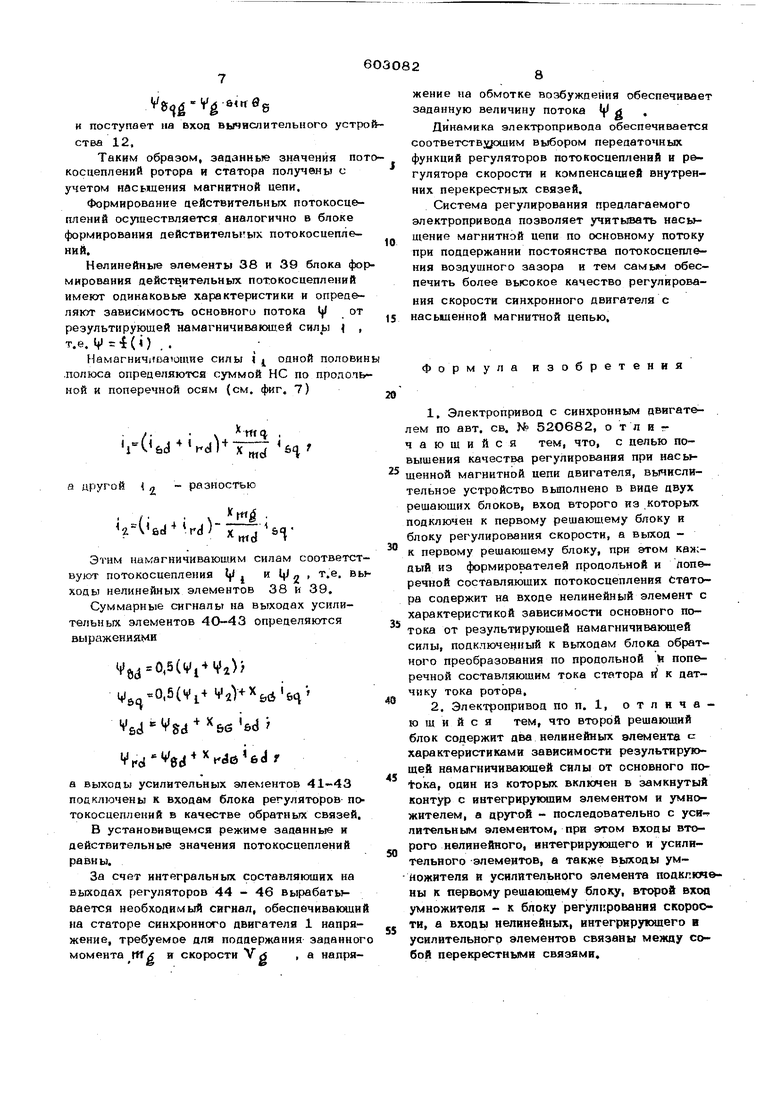
Второй решакядий блок 14 обеспечивает учет насыдения магнитной цепи синхронного двигателя 1 при формировании заданньрс значений потокоспеплений Ve V Vrdfi При наличии нагрузки на валу синхронн цввгателя 1 имеется сигнал на вьгхопе регупятора скорости, При зааавной скорости Vd синхронного двигателя 1 ниже основной V . т.е. .Система регулирования поддерживае УХ «Const. При скорости привоца вьтаё основной t,e, систему регулирования поддерживает . ocjPoaiiCTBD ЭДС, Выходные сигналы умно жителей 19 и 20 определяют составляющи тока статора по.проаольной и поперечной осям. ,. -6 . ttlx g -«e-4,|%g V.i ё выходе нелинейного элемента 35 MMg-l .vl-v основного no Vgdg -Составляющая no продолжутокосцепленияной оси; V -составляющая основного пртокосцеплеиия по поперечной оси. Суммарный -сигнал не выходе усилнте ногр элемента 26 fcdg 8d| 66 sagf. на выходе усилительного элемента 27 на выходе усилительного элемента 28 %Й Н бй б ; где KQJ. - реактанц рассеяния обмотки ст тора} X Jf - реактанц рассеяния обмотки ро тора. Полученные сигналы заданных значений потокосцеплений статора и ротора подаются на входы регулиторов блока регулирования потокосцеплений (см, , 5), Принцип учета насьндения магнитной цеп Ф решающем блоке блецукнций, Нелинейные элементы 24 и 25 (см, фиг имеют характеристики, определяюшие зависимость результирующей намагничивающей силыот основного потока ( пля данного синхронного двигателя, т.е. i ((||). Как видно из фиг. 7, относительный поток одной половины полюса IjJ определяется суммой составляющих осн(№ного потокосцепления, а другой Vgo разностью, т.е. Вьгходы нелинейных элементов 24 и 25 соответствуют намагничивающим силам (НС) половин полюсаCl, в (Vi.) (v,), Связь НС i 6. 2 и - соответст вующими НС по 1фоаольнй5 и поперечной осям определяются зависимостями ij 0,5(,. ..-0.5(i.-(,). Составляющая НС по оси 4 определяется суммой НС от составляющей тока ста Р tJx п° d и Toita ротора .,, 5dg °й Масштабы по входам усилительного элемента 29 вь1браиы так, что его вьпсод определяют заданный ток ротора. M -6ci, поступает на входусилительного члемента 27 вычислительного устройства. Связь составляющей НС по оси ( с составляющей тока статора по той же оси опрееляютсяае Y,«j и - иенасыпенные знаения реактивной взаимоиндукции статора и OTOpa по осям о и « , Суммарный сигнал на выходе интегриующего эпемеита 30 определяет б4«б8 «««8 Я( де 8 g - угол между вектором основного потока и продольной осью; постоянная интегрирования. Выход Множителя 21 определяет; состав яюшую основного потокосцепления по оси Q. .. в4пвб и поступает на вход вычислительного устро ства 12, Таким образом, заданные значения пот косцеплений ротора и статора пол 1внь1 с учетом иасьжцения магнитной цепи. Формирование цействительных потокосцеплений осуществляется аналогично в блоке формирования действителыых потокосцеплений. Нелинейные элементы 38 и 39 блока фор мирования действ,ительнь1Х потокосцеплений имеют одинаковые характеристики и определяют зависимость основноги потока 1|/ от результирующей намагничивающей силы , т.е. М -i() . . ИамагниЧ1 11ающие силы | одной половин .полюса определяются суммой НС по продольной и поперечной осям (см. фиг. 7)
X
/ Шс ,
rOerVdVTZJ
Xmc( n
а цругой { п разностью
r-(6d
f
&V
md
Этим намагничивающим
силам соответствуют потокосцепления Ij/ и Ц1 я , т.е. Bbfходы нелинейных элементов 38 и 39.
Суммарные сигналы на вькодах усилительных элементов 4О-43 определяются вь рс1жениями
,5() М.)
Msct-0-5(
4-х
&Й
.
Vsd
Мгс1 вс| ««бб г
а выходы усилительных элементов 41-43 подключены к входам блока регуляторов потокосцеплений в качестве обратных связей,
В установивщемся режиме заданные и действительные значения потокосцеплений равны.
За счет интегральных составляющих на выходах регуляторов 44 - 46 вырабатььвается необходимый сигнал, обеспечивающий на статоре синхронного двигателя 1 напряжение, требуемое для поддержания заданного момента rtf л и скорости Vd , а напря1,Электропривод с синхронным двигателем по авт. св. № 52О682, отличающийся тем, что, с целью повышения качества регулирования при нась щенной магнитной цепи двигателя, вьтчислительное устройство выполнено в виде двух решающих блоков, вход второго из которых подключен к первому решающему блоку и блоку регулирования скорости, а выход к первому решающему блоку, при этом кам;дый из формирователей продольной и поперечной составляющих потокосцепления Статора содержит на входе нелинейный элемент с характеристикой зависимости основного потока от результирующей намагничивающей силы, подключенный к выходам блока обратного преобразования по продольной h поперечной составляющим тока статора rf к датчику тока ротора,
2.Электропривод по п. 1, отлнчаю щ и и с я тем, что второй решающий блок содержит два нелинейных элемента « характеристиками зависимости результирующей намагничивающей силы от основного поtoKa, один из которых включен в замкнутый контур с интегрирующим элементом и умножителем, а другой - последовательно с усилитепьным элементом, при этом входы второго нелинейного, интегрирующего и усилительного элементов, а также выходы умножителя и усилительного элемента подкг.кявны к первому решающему блоку, второй вход умножителя - к блоку регулирования скорости, а входы нелинейных, интегрирующего в усилительного элементов связаны между собой перекрестными связями. жение на обмотке возбуждения обеспечивает заданную величину потока V и Динамика электропривода обеспечивается соответствзуошим выбором передаточных функций регуляторов потокосцепленвй и регулятора скорости и компенсацией внутренних перекрестных связей. Система регулирования предлагаемого электропривода позволяет учитывать насыщение магнитной цепи по основному потоку при поддержании постоянства потокосцепления воздушного зазора и тем самым обеспечить более высокое качество регулирования скорости синхронного двигателя с насыценной магнитной цепью. Формула изобретения
/7
Z
/
S9

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с синхронным двигателем | 1976 |
|
SU615583A2 |
| Электропривод с асинхронным короткозамкнутым двигателем | 1976 |
|
SU615584A1 |
| Электропривод с синхронным двигателем | 1975 |
|
SU809460A2 |
| Асинхронный электропривод | 1975 |
|
SU809461A1 |
| Электропривод с синхронным двигателем | 1973 |
|
SU551785A1 |
| Электропривод с синхронным двигателем | 1970 |
|
SU520682A1 |
| Электропривод с синхронным двигателем | 1972 |
|
SU518851A1 |
| Электропривод с асинхронным двигателем с фазным ротором | 1982 |
|
SU1083320A1 |
| Устройство для регулирования возбуждения синхронного двигателя | 1975 |
|
SU604113A1 |
| Устройство для управления электроприводом переменного тока | 1980 |
|
SU983958A1 |


.46
raa
,49
rrf
V
