1
Изобретение относится к электротехнике и может быть использовано в электроприводе с синхронным двигателем.
По основному авт. св. 520682 известен электропривод, в котором питания многофазной обмотки статора синхронного двигателя осуществляется от преобразователя частоты с непосредственной связью, а питание однофазной обмотки возбуждения - от регулируемого возбудителя.
Преобразователь частоты управляется регуляторами продольной и поперечной составляющих тока статора в координатах, жестко связанных с продольной и поперечной осями ротора. Это преобразование осуществляется с помощью подключенного к блоку прямог преобразования координат фор1 рователя гармонических функций угла поворота ротора. На входы регуляторов продольной и поперечной составляющих тока статора подаются сигналы заданных значений продольной и поперечной составляющих тока статора, сигналы действительных значений продольной и поперечной составляющих тока статора получаемых с датчиков фазовых токов через блок обратного преобразования.
и сигналы компенсации ЭДС вращения. Для получения сигнала ЭДС вращения в приводе применяются формирователи прдольной и поперечной составляющих 5 потокосцепления статора, два блока умножения, управляемых от датчика скорости ротора, и два динамических
звена.
Регулируеьвлй возбудитель управляется от регулятора возбуждения, выпопненного в виде регулятора потокосцепления возбуждения. Электропривод обеспечивает cos 4 1 самого двигателя и постоянство (независимо от
15 нагрузки на валу) абсолютной величины потокосцеплеиия статора, для чего в систему регулирования включен вычислительный блок для формирования заданных значений составляющих тока
20 статора, установленное между регулятором скорости и регуляторами составляющих тока статора и потокосцепления возбуждения и реализующее соответствующие зависимости между напряжениями на выходах и напряжением
на входе.
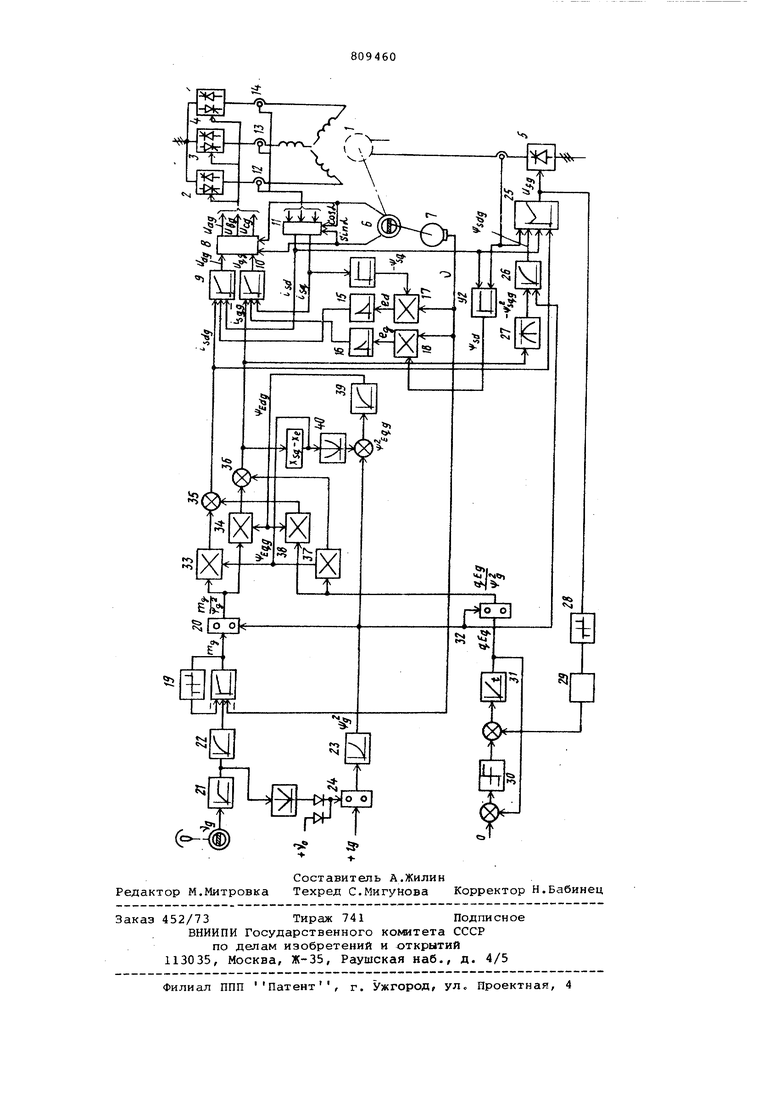
Для управления и регулирования скорости применяется регулятор скорости, на вход которого подается заданное значение ск -:г-ости с выхода задатчика интенсивности и действите ное значение скорости с выхода датчика скорости ротора. Система регулирования предусматривает регулирование скорости ослаблением поля, дл чего применены блоки деления, элемент ИЛИ, нелинейных элемент , блок возведения в квадрат и зсщатчик пос тоянного сигнала опорной скорости 1 . Гeдocтaткoм данного электроприво да является то, что поддержание во всех режимах нагрузки потокосцепяения статора , равным номинальному значению Ч-ц потокосцепления статора и поддержание 1 требует при больамх ударных нагрузках большого запаса по напряжению возбудителя-и высоковольтного исполнения ротора. Ограничение напряжения возбудителя для выполнения указанных режимов пр водит к колебательности систекы при больших ударных перегрузках. Цель изобретения - улучшение регулировочных характеристик электропривода и повьаиение перегрузочной способности синхронного двигателя при ограниченном напряжении возбудителя . Поставленная цель достигается те что в известный электропривод допол нитель-HQ введен формирователь сигна ла заданного реактивного момента синхронного двигателя, входы которо соединены с задатчиком потокосцепле ния и с регулятором возбуждения, а выход подключен к вычислительнол блоку, причем вычислительный блок с блоками умножения в каждой из цепей формирования сигналов управления по перечной и продольной составляющих тока статора и формирователями сигналов защанного потокосцеппения по продольной и поперечной осям содержит дополнительно два сук атора и два блока умножения, первые входы к торых соединены с выходом формирова теля сигнсшов заданного потокосцепления по осям, при этом выходы всех указанных блоков умножения через упо мянутые сумматоры подсоединены ко входам регуляторов продольной и поперечной составля 01дих тока статора. Кроме того, формирователь сигнала заданного реактивного момента синхро ного двигателя содержит последовательно включенные релейный элемент, динамическое звэно,задатчик интенсивности и блок деления, вход деления которого соединен с задатчиком потокосцепления, а выход - с вычислительным блоком, при этом вход релейного элемента соединен с выходом регулятора возбуждения. На чертеже представлена функциональная электрическая схема электро.привода. Кгикдая фаза статора синхронного двигателя 1 питается от реверсивного регулируемого источника питания 2-4 соответствекно. Обмо- ка возбуждения синхронного двигателя 1 питается от I регулируемого возбудителя 5. На валу синхронного двигателя имеется датчик 6 углового положения ротора, выходные сигнсшы которого пропорционсшьны тригонометрическим функциям угла поворота ротора синхронного двигателя cos оС и sin ОС, где о - электрический угол поворота ротора. Кроме того,на валу синхронного двигателя 1 имеется датчик скорости - тахогенератор 7. Управляющие входы источников питания 2-4 подключены к выходам блока 8 прямого преобразования, который переводит управляющие сигналы из координат, связанных с ротором синхронного двигателя, к фазовым координатам. На входы блока прямого преобразования подключены выходы датчика 6 и выходы регуляторов продольной 9 и поперечной 10 составляющих тока статора. На вход регуляторов 9 и 10 подаются сигналы отрицательной обратной связи соответственно по продольной и поперечной составляющим тока статора. Сигналы отрицательной обратной связи по составляюощм тока статора снимаются с выхода блока 11 обратного преобразования, котоЕ 1Я осуществляет преобразование фазных токов статора в продольную и поперечную составляющие тока статора. На входы блока 11 подаются сигналы с выхода датчиков 12-14 тока фаз статора синхронного двигателя и сигналы с выхода датчика 6. Кроме того, на входы регуляторов 9 и 10 через соответствующие диналмческие звенья 15 и 16 подгиотся сигналы компенсации ЭДС вращения ро-. тора синхронного двигателя. На выходе у| «ожителя 17 получают сигналы: Ufewx ed -Iisq.- хзя a на выходе умножителя 18 Ufet,, eq где ej, ец - ЭДС вращения ротора синхронного двигателя по продольной и поперечной осям соответственно; V - скорость вращения ротора двигателя; - ток статора синхронного двигателя по поперечной оси; Xjo - реактанц статора по поперечной оси; Yj, V - потокосцепления статора по продольной и поперечной осям соответственно (все переменные здесь и далее даны в относительHnjx единицах) . При этом Hjd. Xsd-isd + if где Xj - реактанц статора по продольной оси; lyj - ток статора по продольной оси; wd реактанц взаимоиндукции статора и ротора; i| - ток возбуждения двигателя Сигналы задания на регуляторы 9 и 10 подаются с выхода вычислительного блока, на входы которого подаются сигналы с выхода регулятора скорости и формирователя сигнала защанного реактивного момента синхронного двигателя. Узел регулятора скорости вкл чает в себя собственно регулятор 19 и блок 20 деления. На вход регулятора 19 подается сигнал задания с выхода задатчика 21 интенсивности через фильтр 22 и сигнал отрицательной обратной связи по скорости с выхода тахогенератора 7. На один из входов блока 20 деления подается сигнал mq с выхода регулятора 19, а на другой вход подается сигнал квадрата заданного потокосцеплени и у с выхода нелинейного элемента 23. На вход нелинейного элемента 23 подается сигнал с выхода делителя 24. Для скорости синхронного движения ниже основной сигнал на выходе делителя эаписываL. ется: и Ч W сигналы заданной ЭДС и основной скорости синхронного двигателя, т.е. система регулирования поддерживает заданное потокосцепление У const. При скорости привода вьлЬе основной сигнал на выходе делителя 24 записывается:Ь,, т.е. система регулирования поддержи вает постоянство ЭДС, так как в это случае е„-Уп tVtCOhSt. УправляюЕЦИй вход возбудителя 5 подсоединен к выходу регулятора 25, ко торый выполняет роль регулятора потокосцепления возбуждения. На вход регулятора 25 (в общем случае интег ропропорцион сшьно-дифференциального подается отрицательная обратная свя по потокосцеплению и сигнал задания Обратная связь потокосцеплению формируется путем суммирования на вход регулятора 25 сигналов, поступающих с блока 11 обратного преобразования и с датчика тока статора таким образом, чтобы суммарный сигнал обрат ной связи был бы равен; f md-4d где У потокосцепление возбуждения Xj- реактанц обмотки возубждени Сигнал задания на регулятор 25 формируется суммированием на его вх де сигналов с выхода нелинейного эл мента 26 и с выхода узла формирования заданных значений тока статора аким образом, чтобы и ш - f 1 . Л13---- fsdc} -Т-- «dqi md X fi-id где 4f{o - заданное значение потокосцепления возбуждения; Xjj- переходный реактанц по продольной оси; заданное значение продольной составляющей тока статора. На выходе нелинейного элемента 26 получают сигнал, равный Ы, где V / %,-j - заданные значения по токосцеплений статора по Поперечной и продольным осям со, соответственно. Сигнал подается н& вход нелинейного элемента 26 с выхода нелинейного элемента 27, который выполняет функцию: i Ubbin (Jsg 549 Дополнительно введенный в систему регулирования электроприводом формирователь сигнала заданного реактивного момента синхронного двигателя содержит последоватепьно включенные релейный элемент 28, динамическое звено 29 с передаточной функцией, вид которой определяется для каждого конкретного электропривода, задатчик интенсивности с пропорциональным звеном 30 и интегратором 31, а также блок 32 деления. На вход пропорционального звена 30 подается нулевой сигнал, а на вход интегратора 31 - сигнал с выхода регулятора 25 через релейный элемент 28 и динамическое звено 30 таким образом, чтобы на выходе задатчика интенсивности появился сигнал заданного реактивного момента д при выходном сигнале регулятора 25, соответствующем максимальному напряжению возбудителя 5. Сигнал делится в блоке 32 деления на квЪдрат заданного потокосцепЛенин Уа Вычислительный блок с блоками 33 и 34 умножения в каждой из цепей формирования сигналов задания поперечной и продольной составляющих тока статора и формирователями сигналов заданного потокосцегшения по продольной и поперечной осям содержит дополнительно два сумматора 35 и 36 и два блока 37.и 38 умножения, первые входы которых соединены с выходом формирователя сигнала згшанного реактивного момента синхронного двигателя, а вторые - с выходами соответствующих формирователей сигналов заданного потокосцепления поосям, при чтом выходы всех укааапних блоков Умножения через упомянутые сумматоры подсоединены к входам регуляторо 9 и 10. На выходе блока умножения 37 получают сигнал: bl,u -;р- «Ч9-Сигнал Yjq формируется по зависимос ( «V}где Хе - произвольный реактанц; ijon, - заданное значение тока статора по поперечной о На выходе блока умножения 38 палуч ют сигнал: b.., формирование сигнала Yida ется нелинейными элементами 39 и 4 по зависимости: ,4На входы сумматора 35 подаются сигн лы с выходов блоков умножения 33 и при зтом на его выходе появляется сигнал iscfij, заданного значения тока статора по продольной оси: -t-, . ( На входы сумматора 36 подаются сигналы с выходов блоков 37 и 34 умнож ния, при этом на его выходе появляется сигнал заданного значения тока статора по поперечной оси: , 1 .,,.., 7 U Электропривод работает следующим образом. При ударном приложении нагрузки .к валу двигатель развивает момент благодаря тому, что возрастает зада ние на ток статора и ток возбуждени Так как напряжение возбудителя огра ничено, то он выходит на ограничени раньше, чем двигатель развивает тре буемый момент, при этом на выходе релейного элемента 28 появляется си нал, служащий заданием интегратору 31, на выходе которого с заданным темпом нарастания появляется сигнал заданного значения реактивного момента двигателя, который делится. на квадрат заданного потокосцеплени fn и является составной частью задания составляющих тока статора. Таким образом, для обеспечения требуемого момента асинхронного двигателя ограниченные возможности по форьдарованию возбуждения компенсируются дополнительным формированием тока статора. Электропривод позволяет использовать возбудители с меньшим запасом по напряжению. Кроме того, увеличивается быстродействие система.вследствие меньшей инерционности цепи статора по сравнению с цепью возбуждения. При этом обеспечивается режим работы электропривода, при котором в установившемся режиме потокосцепление статора УЗ поддерживается равным номинальному Чн также поддерживается cos Ч 1. В переходном режиме осуществляется дополнительное формирование тока статора и поддержание потокосцепления в воздушном зазоре Ч , равном Уц. При этом cosf 1. Требования по запасу напряжения возбудителя снижаются, и при ограниченном напряжении возбудителя характер переходных процессов сохраняется близким к оптимальному. Формула изобретения 1.Электропривод с синхронным двигателем по авт. св. № 520682, отличающийся тем, что, с целью улучшения регулировочных характеристик и повышения перегрузочной способности синхронного двигателя при ограниченном напряжении возбудителя, в него дополнительно введен форЛмрователь сигнала заданного реактивного момента синхронного двигателя, входы которого соединены с задатчиком потокосцепления и с регулятором возбуждения, а выход подключен к вычислительному блоку. 2.Электропривод по п. 1, отличающий ся тем, что вычислительный блок с блоками умножения в каждой из цепей формирования сигналов управления поперечной и продольной составляющих тока статора и формирователями сигналов заданного потокосцепления по продольной и поперечной осям содержит дополнительно два сумматора и два блока умножения, первые входы которых соединены с выходом формирователя сигналов заданного потокосцепления по осям, при зтом выходы всех указанных блоков умножения через упомянутые сумматоры подсоединены ко входам регуляторов продольной и поперечной составляющих токп статора. 3.Электропривод по пп. 1 и 2, о-тличающийся тем, что формироватсУ1Ь сигнала заданного реактивного момента синхронного двигат.еля содержит последовательно включенные репейный элемент, динамическое звено, задатчик интенсивности и блок деления, вход деления которого соединен с задатчиком потокосцепления. а выход - при этом соединен декия. 980946010 с вычислительным блоком.Источники информации, вход релейного элементапринятые во внимание при экспертизе с выходом регулятора воэбуж- 1. Авторское свидетельство СССР . 520682, кл. Н 02 Р 5/40, 1970.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с синхронным двигателем | 1976 |
|
SU615583A2 |
| Электропривод с синхронным двигателем | 1976 |
|
SU603082A2 |
| Вентильный электропривод | 1984 |
|
SU1205246A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Устройство для компенсации эдс в синхронном частотно-управляемом электроприводе | 1974 |
|
SU688976A1 |
| Электропривод с синхронным двигателем | 1974 |
|
SU658690A1 |
| Электропривод | 1979 |
|
SU875566A1 |
| Электропривод | 1983 |
|
SU1167688A1 |
| Электропривод с синхронным двигателем | 1970 |
|
SU520682A1 |
| Вентильный электропривод | 1987 |
|
SU1439727A1 |