систему регулирования скорости вращения, iie уступающую но качеству регулирования приводам ностоянного тока.
2.Привод должен иметь перегрузочную снособность, ограничиваемую лищь мощностью источников питания, а не динамическими свойствами двигателя.
3.Привод должен иметь автоматическую систему регулирования реактивной мощности цени статора с тем, чтобы поддерживать ее на экономически целесообразном уровне.
Цель изобретения - расщирение диапазона регулирования скорости и регулируемой моцдностц и повыщение качества регулирования скорости в динамике.
Особенность предлагаемого электропривода заключается в следующем.
Система регулирования построена не в фазных координатах, как это делается обычно, а в синхронно вращающихся коордииатах а, р, для чего в систему введены блоки прямого и обратного преобразования переменпых. В координатах а, (3 при установивщихся режимах все величины, характеризующие работу двигателя, постоянны. Следовательг10, регулнрование, построенное в указанных координатах при установивщихся режимах, исключает появление фазовых погрешностей, т. е. фильтры в системе регулирования не влияют на установившийся режим.
Для воздействия на ток статора разде/пяю регулируются его составляющие по осям а н р, для чего в систему введены регуляторы токов но осям. Это дает возможность раздельно (независимо) воздействовать на электромолнитный вращающий момент двигателя (через регулятор тока /д ), и на его реактивную мощность (через регулятор тока /з ).
Воздействие на вращающий момент и реактивную мощность двигателя может быть осуществлено также и через составляющие но осям тока ценн ротора (регуляторы тока iу,, и 13/-)- Это дает возможность построить несколько вариантов регулирования АСД, например: по току статора, по току ротора, комбинироваиные варианты.
Для нридания электроприводу с АСД свойств электропривода постоянного тока, регулируемого по скорости, в систему введен регулятор скорости с задатчиком интенсивности. Это обеспечивает, во-первых, возможность автоматического поддержания скорости АСД на уровне задания независимо от нагрузки на валу, и во-вторых, дает возможность включить электропривод в систему автоматического унравления скоростью АСД.
Для придания электроприводу с АСД свойств синхронного компенсатора, регулируемого по реактивной мощности, в систему введен измеритель тока по оси р, т. е. задания реактивного тока статора. Это обеспечивает при помощи регулятора тока но оси р, во-нервых, возможность автоматического поддержания реактивной мощности статора АСД на
уровне задания независимо от нагрузки на валу и скорости вращения, и во-вторых, дает возможность включить электропривод в систему автоматического управления реактивной
мощностью АСД.
В системе регулирования предусмотрена компенсация вредного влияния э. д. с. скольжения на динамику электропривода, для чего введены измерители потокоснеплепий ротора
но ося.м ц, р, измеритель скольжения и множнтельиые элементы с динамическими звеньями.
Система регулирования построена по нрин; ципу систем подчинеггного регулирования с
последовательной коррекнией так, что регуляторы тока и регулятор скорости компенсируют основные электромеханические и электромагнитные инерционности АСД. Это дает возможность выполнить э;1ектропривод с высоКИМ быстродействием и обеспечить высокую его перегрузочную снособность, величина которой ограничена мощностью источников ннтания цепей статора и ротора, а не динамическими свойствами АСД.
Поскольку система регулирования АСД ностроена па использовании медленно меняющихся величин (составляющие по осям а, р), то она может б1)1ть реалнзовапа па ociroBe элементов УБСР, разработаннЕлх д.тя электронривода ностоянного тока.
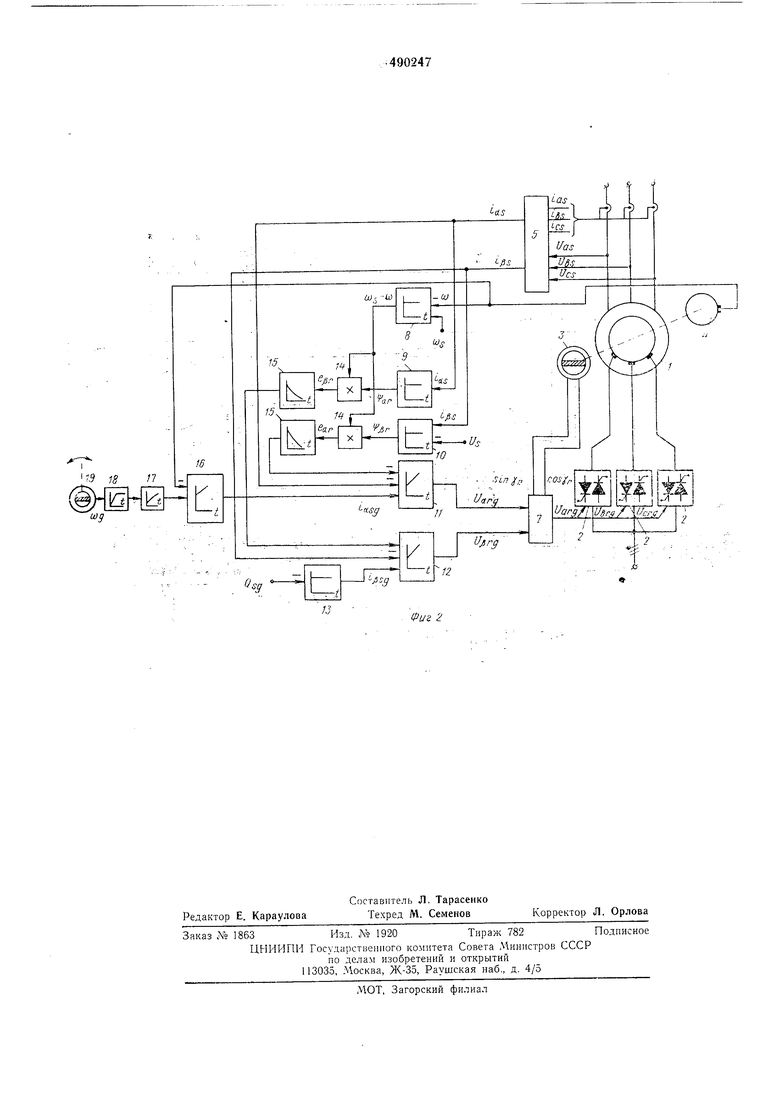
Па фиг. 1 представлена функциональная схема предлагаемого электропривода с АСД, регулируемого по токам статора н но тока.м ротора (вариант I); на фиг. 2 - схема унрощенного варианта регулирования по токам статора (вариант И).
Схема содержит асинхроннзированный синхронный двигатель (АСД) 1, статические реверсивные регулируемые источ1 ики питания 2 фаз
ротора АСД, датчик углового ноложения 3 ротора АСД, датчик скорости АСД (тахогенератор) 4, блок прямого преобразования 5 токов статора от фазных величин к синхронно вращающимся координатам а, р, блок нря.мого
преобразования 6 токов ротора от фазных ве.1НЧНН к синхронно вращающимся координатам, блок обратного преобразования 7 от синхронно вращающихся координат к фазным, измеритель разности скоростей: син.хронной и
ротора (измеритель скольжения) 8, измеритель потокосценления 9 обмотки ротора в оси а, измеритель потокоснепления 10 обмотки ротора в оси р, регулятор тока 11 статора по оси а, регулятор тока 12 статора по оси р, преобразователь тока задания 13 по оси р (источник задания по реактивной мощности статора АСД), мнол ительиые элементы 14, динамические звенья 15 в цепях положительных связей по э. д. с. вращения, регулятор скорости (источник задания но моменту вращения АСД) 16, фильтры 17 в цепи задания скорости, задатчик сигнала 18 задаиия скорости, источник сигнала 19 задания скоростн.
Обмотка статора АСД 1 питается от источиика симметричного трехфазного спнусондальиого напряжения с постоянной угловой частотой coj . Каждая фаза ротора АСД питается от одного из реверсивных регулируемых источников питания 2. Источники питания фаз ротора имеют линейную зависимость между входным управляющим напряжением и выпрямленным напряжением. На валу АСД имеется датчик углового положения 3 ротора относительно синхронно вращающихся осей а, Р, выходные сигналы которого пропорциональны тригонометрическим функциям углового положения ротора АСД и cos у г (где Y ;. - электрический угол положения ротора по отношению к осям а, р). Кроме того, на валу АСД имеется датчик скорости 4.
Входные блоки 5 и 6 выполняют прямые преобразования от фазных координат «а, Ь, с к координатам а, Р: блок 5 - для токов статора
2 о- f ,, а, Cos 0) t + i t,,- Cos/co, +
(co, + |-) ;
- - i й4-Sinco /+ t,. -510( 2n
2n ч , . „. / , 2л 1 -)-Ь co, 4- -jj ,
3
6 - для токов ротора
2л
7 lie/CosY + it,r-Cos.iy , - j) +
+ f,,.cos(Y. + f-) ;
i V - r+ iir-Sin Y r |) +
+ t,,.Sin(Y. +f )
Выходной блок 7 выполняет обратное преобразование от координат ц, р к фазным координатам «а, Ь,
и„,, и
COSY,- fya - -Sin-Y, ;
arg
j.rg
и:,.., {/,.„. Cos (Y,-2i)-t/o.SinX
0
.X2л
)
erg и arg- Cos (Y . -by ) - f Sra-SinX
X(,.Hf).
Управляющие входы источников питания 2 фаз ротора АСД подключены к выходам блока обратного преобразования 7. На входы этого блока, кроме выходов датчика углового положения 3 ротора, подключены выходы регулятора 11 тока статора по оси а и регулятора 12 тока статора по оси р.
На вход пропорционально-интегрального регулятора 11 подаются отрицательная обратная связь по току статора в оси а и сигнал задания. Этот сигнал поступает от пропорционального или пропорционально-интегрального регулятора скорости 16. На вход регулятора скорости подается отрицательная обратная связь по скорости от датчика скорости 4 АСД и сигнал задания. Сигнал задания поступает
от источника сигнала 19 ручного или автоматического управления приводом через задатчик сигнала 18 и фильтр 17, так же это осуществляется в регулируемом электроприводе постоянного тока.
, На вход пропорционально-интегрального регулятора 12 подаются отрицательная обратная связь по току статора в оси р и сигнал задания. Этот сигнал поступает от преобразователя тока задания 13, на вход которого подается сигнал задания по реактивной мощности для статорной цепи АСД. Указанный сигнал поступает от органа ручного или автоматического управления реактивной мощностью привода.
Обратные связи по токам статора в осях а и р поступают на регуляторы 11 и 12 от входного блока 5, функции которого описаны выше. Кроме того, на входы указанных регуляторов подаются положительные обратные связи по составляющим по осям а, и р э. д. с. скольжения ротора АСД от множительных элементов 14 через динамические звенья 15. Передаточные функции звеньев 15 выбираются обратными передаточным функциям регуляторов 11 и 12 соответственно.
Входы множительных элементов 14 подключены к измерителю 8 (измеритель скольжения) разности скоростей синхронной и скорости ротора, а также к измерителям 9 и 10
потокосцепления ротора по осям а и р. На входы измерителей потокосцеплений подаются составляющие по осям токов статора и ротора от входных блоков 5 и 6.
Ниже рассмотрены установившиеся режимы работы предлагаемого электропривода (все переменные взяты в относительных единицах) .
Вращающий момент АСД и реактивную мощность его статорной цепи можно определить по следующим соотношениям:
ijf
W
.
3s
as
:ts
w - w
Q. 5
I Ic
Is
55 в случае достаточно мощной питающей сети допустимо полагать, что
/„ (У, const, t/3 -0.
Кроме того, при малом активном сопротивлении обмотки статора АСД получается, что
ЪО1
as О, f, const.
tOs
65 7/ s ys Q; -. /«. При отсутствии иагрузки на валу АСД фактическое значение скорости ю равно задаииому значению со, за счет работы регулятора скорости 16. Сигнал на выходе этого регулятора равен нулю, и, следовательно, равен нулю статорный ток по оси а за счет работы регулятора тока 11: iyg iaso- О, т. е. т 0. За счет работы регулятора тока 12 в статоре но оси |3 поддерживается ток i.,,, г g- т. е. реактивная мощность статорной цепи равна заданному значению: Р Q . При наличии нагрузки на валу АСД на выходе регулятора скорости появляется сигнал (О . Регулятор тока 11 нодзадания г , держивает , п.. Регулятор тока 12 работает так же, как было описано выше. За счет положительных связей по . и ез,регуляторы 11 и 12 обеспечивают в установившихся режимах электропривода компенсацию э. д. с. скольжения в обмотках ротора по осям аир. Соответствуюш,им выборам передаточных функций регуляторов токов и скорости электропривода придаются динамические свойства, аналогичные свойствам электропривода постоянного тока, регулируемого по скорости. Для выбора передаточных функций регуляторов применены методы синтеза систем подчиненного регулирования с последовательной коррекцией. На фиг. 2 представлен упрош,енный варнант предлагаемого электропривода. Упрон,ение достигнуто за счет устранения б;1ока прямого преобразования 6 токов ротора от фазных величин к синхронно вращающимся координатам. В схеме на фиг. 1 этот блок используется при вычислении потокосцеплений Ч й (измерители 9 и 10). В упрощенной схе.ме указанные потокосцеплення вычисляются упрощенно (нзмерители 9 и 10) с использованием только токов статора i .j, и г . Как указывалось выще, возможно построение системы регулирования на основе только токов ротора, т. е. без блока преобразования 5, но с сохранением блока преобразования 6. Все остальные элементы остаются без изменений. Предмет изобретения 1.Регулируемый электропривод с асинхронизированным синхронным двигателем, содержащий реверсивные регулируемые источники питания фаз ротора двигателя, датчик углового положения ротора относительно синхронно вращающейся системы координат, датчики скорости и скольжения, регуляторы и датчики активной и реактивной составляющих тока статора, отличающийся тем, что, с целью расширения диапазона регулирования скорости, повышения качества регулирования в динамике, регуляторы активной и реактивной составляющих тока статора выполнены в виде пропорционально-интегральных регуляторов, дополнительный вход регулятора активной составляющей тока статора через динамическое звено гибкой связи подключен к выходу множительного элемента, входы которого подключены к измерителю составляющей потокосцепления ротора по оси РНК датчику скольжения, дополнительный вход регулятора реактивной составляющей тока статора через динамическое звено гибкой связи подключен к выходу второго .множительного элемента, входы которого подключены к измерителю составляющей потокосцепления ротора по оси а и к датчику скольжения, при этом в качестве измерителей составляющих потокосцеплений ротора по осям аир при.менены су.ммирующие элементы, первые входы которых подключены соответственно к выходам датчиков активного и реактивного токов статора, вторые входы - к выходам дополнительного преобразователя переменных, входы которого подключены к выходам датчиков тока фаз ротора и к выходам датчика углового положения ротора относительно синхронно вращающихся осей координат. 2.Электропривод по п. I, отличающийся тем, что вход задания регулятора активной составляющей тока статора подключен к выходу регулятора скорости (пропорционального или пропорционально-интегрального). fc 77Г I I I r rP r


| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1986 |
|
SU1390762A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |
| Электропривод с регулированием активной и реактивной энергии от сети ограниченной мощности | 1975 |
|
SU699644A1 |
| Электропривод с регулированием активной и реактивной энергии от сети ограниченной мощности | 1978 |
|
SU884065A2 |
| Электропривод с синхронным двигателем | 1975 |
|
SU809460A2 |
| Электропривод переменного тока | 1984 |
|
SU1185528A1 |
| Электропривод | 1987 |
|
SU1439729A1 |
| Устройство управления электроприводом переменного тока | 1976 |
|
SU657558A1 |
| Электропривод | 1983 |
|
SU1167688A1 |