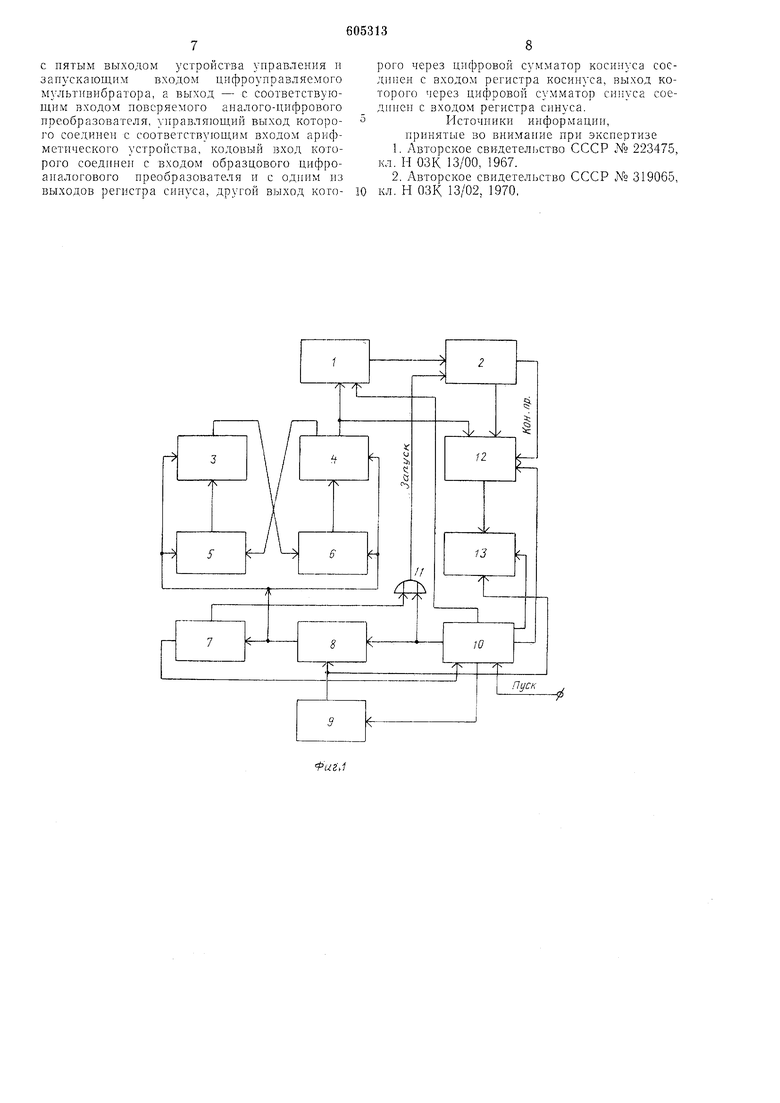
Целью изобретения является измереыне динамической иогрешности (ее характеристик) АЦП как функции частоты входното гармонического сигнала. Поставленная цель достигается тем, что в устройство, содержащее новеряемый аналогоцифровой нреобразователь, образцовый цифро-аналоговый иреобразователь, арифметическое устройство, устройство управления, блок регистрации, причем выход образцового цифро-аналогового иреобразователя соединен с измерительным входом поверяемого аналого-цифрового иреобразователя, кодовый выход которого связаи с одним из входов арифметического устройства, выход которого соединен с блоком регистрации, три выхода устройства управления соединены с соответствующими входами арифметического устройства, блок регистрации и образцового цифроаналогового иреобразователя, введены два цифровых сумматора и два регистра синуса и косинуса, счетчик числа итераций, цифроуиравляемый мультивибратор, регистр частоты, элемент ИЛИ, ири этом четвертый выход устройства уиравления соединен через регистр частоты с входом блока регистрации и цифроунравляемого мультивибратора, выход которого соединен с управляющими входами двух цифровых сумматоров и двух регистров синуса и косинуса, а через счетчик числа итераций - с входом устройства управления и с одним из входов элемента ИЛИ, другой вход которого связан с пятым выходом устройства управления и запускающим входом цифроуправляемого мультивибратора, а выход - с соответствующим входом поверяемого аналого-цифрового преобразователя, управляющий выход которого соединеи с соответствущим входом арифметического устройства, кодовый вход которого соединен с входом образцового цифро-аналогового иреобразователя и с одним из выходов регистра синуса, другой выход которого через сумматор косинуса соединен с входом регистра косинуса, выход которого через цифровой сумматор синуса соединен с входом регистра синуса. Па фиг, 1 представлена блок-схема предлагаемого устройства; на фиг. 2 - временная диаграмма его работы. Устройство содержит образцовый цифроаналоговый преобразователь 1 (ЦАП), новеряемый аналого-цифровой преобразователь 2, регистр 3 косинуса и регистр 4 синуса, цифровой сумматор 5 косинуса и цифровой сумматор 6 синуса, счетчик 7 числа итераций, цифроуправляемый мультивибратор 8, регистр 9 частоты, устройство 10 управления, элемент, ИЛИ 11, арифметическое устройство 12, блок 13 регистрации. При этом один выход устройства 10 связан с управляющим входом преобразователя 1, другой выход - с управляющим входом блока 13, третий соединен с управляющим входом арифметического устройства 12, четвертый связан с входом регистра частоты 9, а иятый через элемеит ИЛИ 11-с управляющим входом преобразователя 2, другой вход элемента ИЛИ 11 соединен с выходом счетчика 7, другой выход которого соединен с входом устройства 10. Кодовый выход регистра 9 частоты через мультивибратор 8 связан с входом счетчика 7 и с управляющими входами цифровых сумматоров 5 и 6 и регистров 3 и 4 синуса и косинуса. Кодовые выходы сумматоров 5 и 6 соединены с соответствующими входами регистров 3 и 4, и выходы регистров 3 и 4 с входами сумматоров 6 и 5 соответственно. Выход регистра 4 соединен с входом цифро-аналогового преобразователя 1, аналоговый выход которого поступает на измерительный вход поверяемого преобразователя 2, а кодовый выход-на вход устройства 12, другой вход которого соединен с входом иреобразователя 1, а управляющий вход - с управляющим выходом преобразователя 2. Кодовый выход устройства 12 связан с кодовым входом блока 13, другой вход которого соединен с выходом регистра 9 частоты. Работа устройства осуществляется следующим образом. По сигналу «Пуск в момент о происходит сброс регистров 3 и 4, сумматоров 5 и 6 в исходное состояние, а на регистре 9 устанавливается начальное значение интервала Ato, соответствующее минимальной частоте генерируемого образцового сигнала шо. Затем по сигналу с устройства управления 10 через элемент ИЛИ 11 происходит первый запуск преобразователя 2 и запуск мультивибратора 8. Мультивибратор 8 генерирует тактовые импульсы с периодом следования . задаваемым в регистре 9. Тактовые импульсы мультивибратора 8 управляют работой сумматоров 5 и 6 и регистров 3 и 4, которые формируют дискретные значения гармонического сигнала x(t) для моментов времени t, L-i () 1 С частотой со - где п - число формируемых значений x(t) за период синусоиды. Формирование значений x(ti) сигнала А:() осуществляется на основе итерационного алгоритма. Вычисление значений x(ti) осуществляется последовательно во времени, .начиная с момена toj когда x(to)Q, по следующей итерационной формуле X (t X ( + у (). ± , д, о y(t).y()-x(ti-i)., у, а I шагов.
Значения кодов x(ti-i} и (/(i-i) хранятся в сумматорах б и 5, а значения
У(-1 и (f-l)
в регистрах 3 И 4 соответственно, где нроисходит деление кодов ) и j/(i-i) на число п.
В каждый момент времени ti, определяемый мультивибратором 8, происходит суммирование кодов регистра 3 (4) и сумматора 6 (5) в сумматоре 6(5), при этом в сумматоре 6 вычисляются значения sinoin i, а в сумматоре 5 значения coscoo i. Таким образом, с частотой мо, задаваемой мультивибратором 8, процедура, записанная в формуле (1), позволяет за п шагов итерации сформировать п цифровых значений за период гармонического сигнала x{t). При этом с момента to счетчик 7 производит подсчет числа шагов итераций 1, а цифро-аналоговый преобразователь 1 производит текущее Преобразование каждого значения x(ti} регистра 3 в аналоговую форму и„ sin (Оо ti,
с последующей аппроксимацией в интервалах i,, i+il. По импульсу «запуск с выхода элемента 11 аналоговый сигнал
f/ Slnco,Z, +ЛрЬ
Преобразуется в преобразователе 2 за время /пр в цифровой эквивалент y{to+tnn, который из-за динамических свойств преобразователя 2 отличается от образцового х() на величину динамической погрещности
У (t. +4р) - (. + пр) А (0 + пр). (2)
Определение динамической погрещности Af n+inp) осуществляется в устройстве 12.
По импульсу аналого-цифрового преобразователя 2 «Конец преобразования коды .г(го4- пр) образцового сигнала из регистра 3 и код (/() из преобразователя 2 считываются в устройство 12, где происходит определение разности по формуле (2).
Следующий «Запуск преобразователя 2 определяется счетчиком 7, в котором задается частота запуска и ее соизмеримость с частотой измеряемого сигнала шоВ момент in через элемент ИЛИ 11 (, nln-k происходит второй запуск преобразователя, на вход которого подается синусоидальный сигнал
/ 8Шш„#, ii.tl tl+t,
и в устройстве 12 определяется (аналогично описанному) новое значение динамической погрещности A(t +t-ffp}. После k преобразований различных участков гармонического сигнала (не обязательно в течение одного периода) в арифметическом устройстве (его памяти) будет накоплено k значений текущей динамической погрепигости, которые по импульсам устройства управления могут подвергаться в арифметическом устройстве текущей статистической обработке.
В момент
( „ М,-п,
определяемый счетчиком 7, на выходе устройства 12 будет вычислена некоторая статистическая динамической погрешности fo(A) (среднее по МОДУЛЮ, средний квадрат и т. д. для частоты соо, задаваемой регистром 9. Затем значение частоты (пп вместе с соответствующей характеристикой fo(A) считываются имЦЗ ЛБСОМ устройства 10 в блок 13. где регистрируются.
После этого описанный процесс повторяется для нового значения частоты coi, задаваемой в регистре 9 с помощью устройства 10.
Таким образом, процесс поверки повторяется для заданного набора частот {co.i} и позволяет снять зависимость ff(A) от (о,-.
Процесс поверки может быть прекращен при достижении характеристики fj(A) заданного значения /зал.
Определение момента достижения возможно визуально по регистратору (блоку) 13 или автоматически в арифметическом устройстве 12. Соответствующая частота со,- будет указывать на допустимую частоту входного сигнала.
Амплитуда Um гармонического сигнала f/msinco регулируется выключением соответствующих разрядов преобразователя 1 по сигналу устройства управления.
Формула изобретения
Автоматическое устройство для измерения
5 динал ических характеристик аналого-цифровых преобразователей, содержащее поверяемый аналого-цифровой преобразователь, образцовый цифро-аналоговый преобразователь, арифметическое устройство, устройство управления, блок регистрации, выход образцового цифро-аналогового преобразователя соединен с измерительным входом поверяемого аналого-цифрового преобразователя, кодовый выход которого соединен с одним из входов арифметического устройства, выход которого соединен с блоком регистрации, три выхода устройства управления соединены с соответствующими входами арифметического устройства, блока регистрации и образцового цифро-аналогового преобразователя, отличающееся тем, что, с целью измерения зависимости динамической погрешности от частоты входного сигнала, в него введены два цифровых сумматора и два регистра синуса и косинуса, счетчик числа итераций, цифроупавляемый мультивибратор, регистр частоты, элемент ИЛИ, при этом четвертый выход устройства управления соединен через регистр частоты с входом блока регистрации и цифроуправляемого
мультивибратора, выход которого соединен с управляющими входами ДВУХ цифровых сумматоров и двух регистров синУса и косинуса, а через счетчик числа итераций - с входом устройства управления и с одним из входов
5 элемента ИЛИ, другой вход которого связан
с пятым выходом устройства управления и запускающим входом цифроуправляемого мультивибратора, а выход - с соответствующим входом поверяемого аналого-цифрового преобразователя, управляющий выход которого соединен € соответствующим входом арифметического устройства, кодовый вход которого соединен с входом образцового цифроаналогового преобразователя и с одним нз выходов регистра синуса, другой выход которого через цифровой сумматор косинуса соединен с входом регистра косинуса, выход которого через цифровой сумматор синуса соединен с входом регистра синуса. Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 223475, кл. Н ОЗК 13/00, 1967.
2.Авторское свидетельство СССР № 319065, кл. Н ОЗК 13/02, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения динамических характеристик аналого-цифровых преобразователей | 1977 |
|
SU660232A1 |
| Функциональный аналого-цифровой преобразователь | 1977 |
|
SU588626A1 |
| Устройство для измерения динамических характеристик аналого-цифровых преобразователей | 1978 |
|
SU738151A1 |
| Устройство для измерения динамических характеристик аналого-цифровых преобразователей | 1982 |
|
SU1067598A1 |
| Устройство для функционального преобразования | 1978 |
|
SU734712A1 |
| Устройство аналого-цифрового преобразования | 1977 |
|
SU641646A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1312737A1 |
| Адаптивный групповой приемник многочастотного кода с импульсно-кодовой модуляцией | 1989 |
|
SU1830632A1 |
| Устройство для регистрации информации | 1985 |
|
SU1304170A1 |
| Аналого-цифровой преобразователь | 1989 |
|
SU1690195A1 |

x()
J(i) / A(t/ Vtffp) MI I
: Mil ()
.
- I
Hi -i
/itol
I -i--r x л
L-toti t,-. -tn
Пуск , I
,KOH. преобразования
и т SinMot
