1
Изобретение относится к сельскохозяйственному машиностроению, а именно к системам автоматического управления загрузкой мобильных сельскохозяйственных машин, в частности картофелеубороч-5 Hhox комбайнов .
Известны устройства для атоматического управления загрузкой мобильных сельскохозяйственных машин, включающие датчик толщины слоя материала, узел 10 настройки сепаратора, узел определения физико-механических свойств материала по косвенному параметру и исполнительные механизмы ,
15
Известны также устройства, включающие датчик толщины слоя клубненосной массы, регулятор динамического режима первого сепаратора с узлом на- go стройки и регулятор поступательной скорости комбайна ,i
Однако известные устройства не обеспечивают необходимую точность подлер- 25 жания оптимального режима нагрузки картофелеуборочного комбайна при переменных значениях физико-механических свойств сепарируемого почвенного пласта.30
Цель изобретения - повышение точности поддержания оптимального режима загрузки.
Это достигается тем, что устройство выполнено с анализатором физико-механинических свойств сепарируемого почвенного пласта, датчиком посева почвы, установленным на конечном участке первого сепаратора, и регулятором динамического режима второго сепаратора, при зтом вход анализатора соединен с датчиком толщины слоя и датчиком просева, а выход - со входом узла настройки регулятора первого сепаратора и входами регуляторов поступательной скорости и динамического режима второго сепаратора.
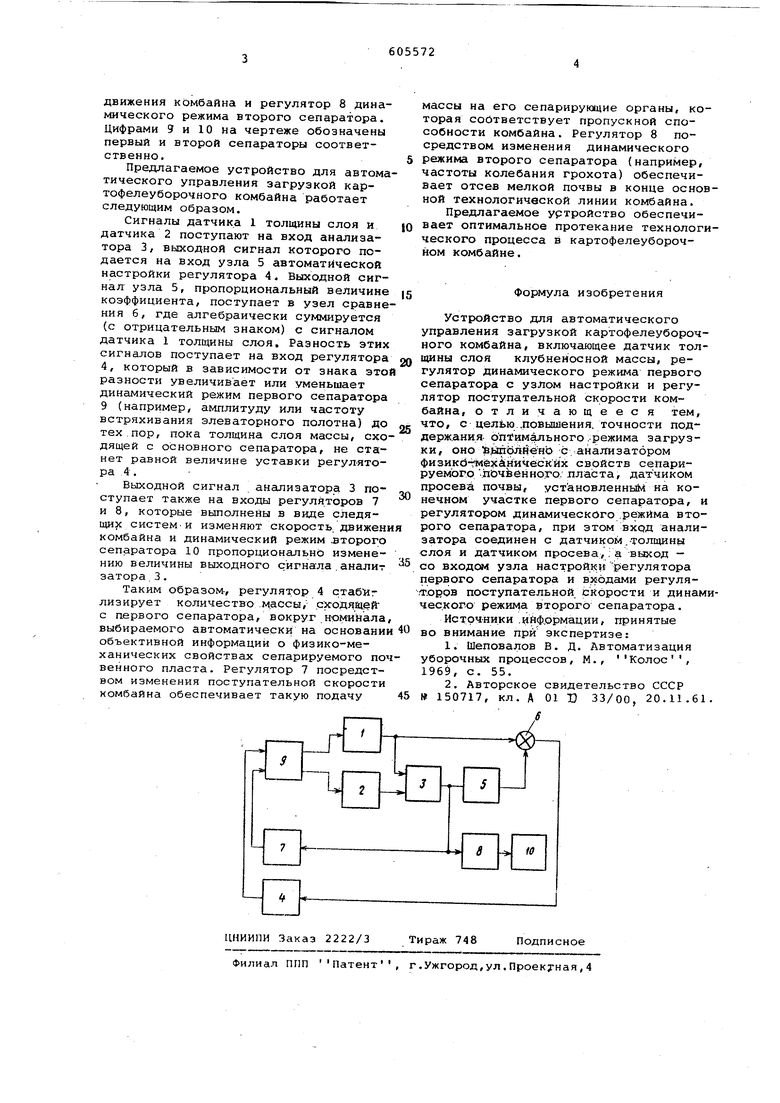
На чертеже приведена функциональная схема предлагаемого устройства.
Устройство включает датчик 1 толщины слоя клубненосной массы, датчик 2 просева почвы на конечном участке основного сепаратора, анализатор 3 физико-механических свойств сепарируемого почвенного пласта, регулятор 4 динамического режима первого сепаратора, узел автоматической настройки 5 регулятора 4, узел сравнения 6, регулятор 7 поступательной скорости движения комбайна и регулятор 8 динамического режима второго сепаратора. Цифрами 9 и 10 на чертеже обозначены первый и второй сепараторы соответственно. Предлагаемое устройство для автома тического управления загрузкой картофелеуборочного комбайна работает следующим образом. Сигналы датчика 1 толщины слоя и датчика 2 поступают на вход анализатора 3, выходной сигнал которого подается на вход узла 5 автоматической настройки регулятора 4. Выходной сигнал узла 5, пропорциональный величине коэффициента, поступает в узел сравне ния б, где алгебраически суммируется (с отрицательным знаком) с сигналом датчика 1 толщины слоя. Разность этих сигналов поступает на вход регулятора 4, который в зависимости от знака это разности увеличивает или уменьшает динамический режим первого сепаратора 9 (например, амплитуду или частоту встряхивания элеваторного полотна) до тех пор, пока толщина слоя массы, схо дящей с основного сепаратора, не станет равной величине уставки регул-ятора .4 , Выходной сигнал анализатора 3 поступает также на входы регуляторов 7 и 8, которые выполнены в виде следящиз систем-и изменяют скорость, движен комбайна и динамический режим второго сепаратора 10 пропорционально изменению величины выходного сигнала.аналит затора.3. Таким образом-, регулятор 4 стабйг лизирует количество .массы, сХОДЯЩ ей с первого сепаратора, вокруг номинала выбираемого автоматически на основани объективной информации о физико-механических свойствах сепарируемого по венного пласта. Регулятор 7 посредством изменения поступательной скорости комбайна обеспечивает такую подачу массы на его сепарирующие органы, которая соответствует пропускной способности комбайна. Регулятор 8 посредством изменения динамического режима второго сепаратора (например, частоты колебания грохота) обеспечивает отсев мелкой почвы в конце основной технологической линии комбайна. Предлагаемое уртройство обеспечивает оптимальное протекание технологического процесса в картофелеуборочном комбайне. Формула изобретения Устройство для автоматического управления загрузкой картофелеуборочного комбайна, включающее датчик толщины слоя клубненосной массы, регулятор динамического режима первого сепаратора с узлом настройки и регулятор поступательной скорости комбайна, отличающеес я тем, что, с целью..повышения, точности под держания- оп имфпьного ; режима загрузки, оно й шрлЙ-енЬ с. анализатором физикб-даёхаинЧёских свойств сепарируемого .пЬчйенного, лласта, датчиком просева почвы, установленным на конечном участке первого сепаратора, и регулятором динамического .режима второго сепаратора, при этом вход анализатора соединен с датчиком.-толщины слоя и датчиком просева,.а выход - со входом узла настройки регулятора первого сепаратора и входами регуляторов поступательной скорости и динамического режи1 а второго сепаратора. Источники .информации, принятые во внимание при экспертизе: 1.Шеповалов В. Д. Автоматизация уборочных процессов, М., Колос, 1969, с. 55. 2.Авторское свидетельство СССР 150717, кл. А 01 D 33/00, 20.11.61.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления загрузкой картофелеуборочного комбайна | 1983 |
|
SU1132826A1 |
| СПОСОБ ИНТЕНСИФИКАЦИИ СЕПАРАЦИИ ПОЧВЫ В КАРТОФЕЛЕУБОРОЧНОМ КОМБАЙНЕ И РОТОРНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2700433C2 |
| Устройство автоматической стабилизации загрузки самоходного картофелеуборочного комбайна | 1982 |
|
SU1102513A1 |
| Автоматическое самонастраивающееся устройство для поддержания оптимальной нагрузки картофелеуборочного комбайна | 1977 |
|
SU919626A1 |
| Устройство автоматического управления загрузкой самоходной уборочной машины | 1980 |
|
SU886801A1 |
| КАРТОФЕЛЕУБОРОЧНАЯ МАШИНА | 2010 |
|
RU2440711C2 |
| Устройство для автоматического регулирования технологического режима корнеклубнеуборочной машины | 1981 |
|
SU986333A1 |
| СПОСОБ УБОРКИ КАРТОФЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2479981C2 |
| КАРТОФЕЛЕУБОРОЧНАЯ МАШИНА | 2013 |
|
RU2541384C2 |
| КАРТОФЕЛЕУБОРОЧНЫЙ КОМБАЙН | 1966 |
|
SU429772A1 |
