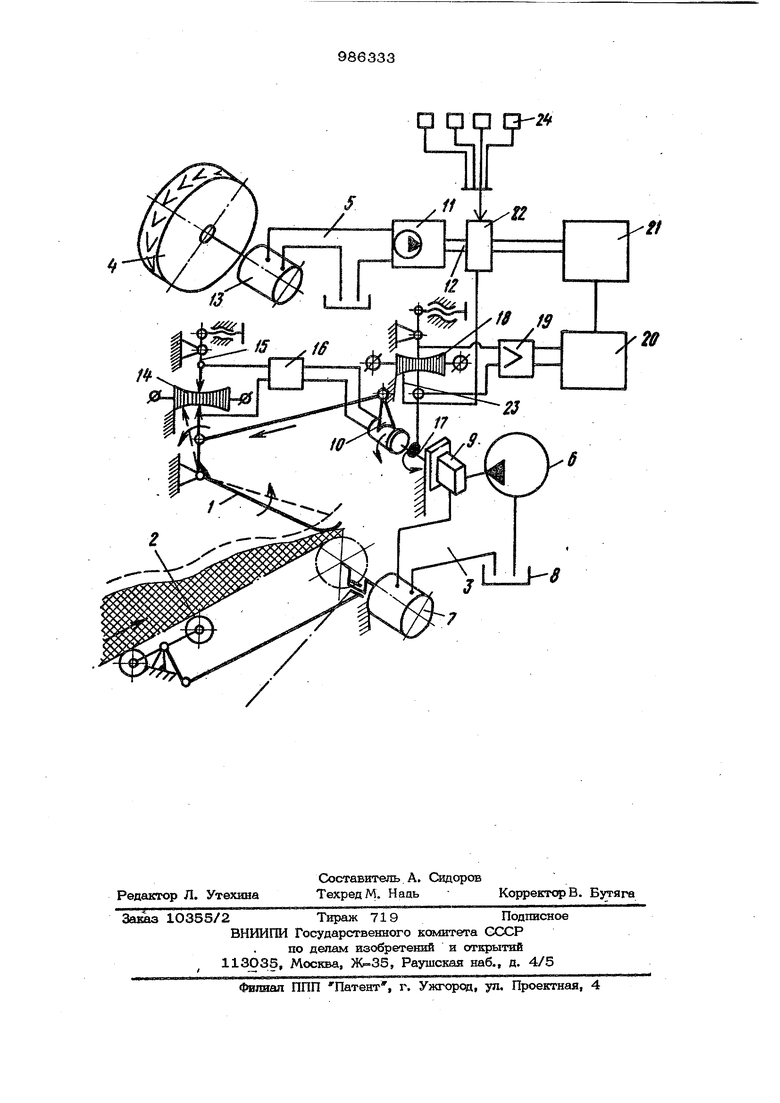
(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО РЕЖИМА КОРНЕКЛУБНЕУБОРОЧНСЙ МАШИНЫ Изобретение относится к области сезт скохозяйственного машиностроения и может быть использовано в самоходных кор. иеклубнеуборочных машинах с бесступенчатым изменением скорости перемещения, например, оснащенных гиаротрансмиссией типа Зауэр. Известно устройство для автоматичеокого управления загрузкой самоходной корнеубс зочной машины, содержащее уотановленный над сепарирующим рабочим оргавом. датчик толпшны слоя, механизмы сравнения и преобразования управляю щего сигнала 11 В этом устройстве преобразованй:е управляющего сигнала осуществляется м&ханическим путем воздействием на рычаг управления производительностью гидронасоса гидростатической трансмиссией. Недостатком устройства является то, что оно представляет собой сх&лу прямого усиления, т. е. исвлючает интехтрируюшие цепи управления, что приводит к существенному статизму при регулировавши и что на каждое изменение загрузки рабочих органов осуществляется коррекция . скорости всего комбайна, вес которого порядка 10 т. В результате возник 1ют дополнительные нагрузки на трансмиссию ; и ходовую часть ксмбайна. При этом с&парирующие рабочие органы комбайна зачастую работают в недогруженном режиме, особенно на легких почвах. Наиболее близким по технической сущности к изобретению является устройство для автоматического регулирования технологического режима корнею неуборочной машины, содержащее гидротрансмиссию привода ведущих колес с гидронасоссмл и мотором, установленный над сепарирующим рабочим органом датчик толщины слоя, связанный преобразователь, механизм сравнения, усилитель; и мотор-редух тор с гидравлическим щюссело управления исполнительным механизмом привода рабочего органа 121, В этом устройств мотор-редуктор соединен посредством тяги с датчиком толщины сепарирующего слоя и подключен к последнему через механизм сравнения и усилитель, а выход ной вал мотора-редуктора соединен с гидравлическим дросселем управления исполнительного механизма. Недостатку устройства являются oivраниченные функциональные возможности сепарирующего рабочего органа, отсутст вие возможности управлять загрузкой машины в целом и возможность забивания рабочих органов при пиковых перегрузках рабочей массой. Цель изобретения - повышение эффективности работы устройства. Поставленная цель достигается тем, что предложенное устройство снабжено последовательно соединенными преобразователем с регулируемым контактом, усилителем, схемой преобразования, иопоянительным электроприйодом с механиз мом аварийной остановки и датчиками технологического контроля. Дополнительный преобразователь кинематически связан с валом мотор-редуктора. Один вход механизма аварийной остановки соединен с регулируемым контактом;, другой - с выходами датчиков технологического контроля, а выход посредством рычага управ пения гидронасоса - с мотором гидротран миссии ведущих колес. Механизм аварийной остановки выполнен в виде электромагнитной муфты. На чертеже изображена схема предложенного устройства. Устройство содержит датчик толщины слоя 1, устанавливаемый над сепарирующим рабочим органом 2, например « эл. ватором самоходной картофелеуборочной машины (на чертеже не показана), испол нительный механизм 3 привода рабочего органа 2 и мост ведущих колес 4 с гидротрансмиссией 5. Исполнительный механизм 3 содержит насос 6, мотор 7, бак 8. Изменение рас хода жидкости осуществляется гидравлическим дросселем управления 9, управля мого мотором-редуктором 10. Гидротрансмиссия 5 содержит Гйдрона сое 11 с рычагом 12 управления его производительностью , мотор 13 и мост ведущих колес 4. Датчик 1 связан через преобразователь 14, механизм сравнения 15 и ус&. лктель 16 с моторс -редуктором 10, соединенным валом 17 с дросселем упра ления 9. Корпус мотора-редуктора 10 кшгематически связан с датчиком 1, а 98 34 вал 17 кинематически соединен с движком преобразователя 18, выход которого связан через усилитель 19, схему преобразования 20 с исполнительным электроприводом 21 и через механизм аварийной остановки 22 с рычагом 12. Преобразователь 18 имеет регулируемый контакт 23 для фиксации максимально допустимого отклонения датчика 1. Для контроля сбива режима на рабочих органах установлены датчики технологического контроля 24. В качестве датчиков 24 может быть использована система автоматического контроля УСАК - 13, выход со звукового сигнала которой подсоединяется ко входу механизма аварийной остановки 22, другой вход которого электрически соединен с регулируемым контактом 23 преобразователя 18. Устройство работает следующим о разом. При работе уборочной машины в режиме автомата по рабочим органам 2 движется рабочая масса. При отклонении датчика 1 от заданнснго значения поворачивается связанный с ним корпус мотора-редуктора 10. Иоза большого передаточного числа понижающего редуктора с поворотом корпуса поворачивается и вал 17, соединенный с дросселем управления 9, изменяя расход масла в гидросистеме и тем самым обороты исполнительного механизма 3. Кроме того, механическое перемешение датчика преобразуется через преобразова-тель 14 в электрический сигнал, который усиливается усилителем 16, и включая мотор-редуктор 1О, дополнительно поворачивает вал дросселя в ту же сторону. Настройка регулируемой толщины на заданное значение производится смещением механизма сравнения 15. Вследствие того, что вал дросселя перемещается пропорционально отклоненшо слоя, так же изменяется расход маола в гидравлической системе, а следовательно и оборота исполнительного м&ханизма. Однако из-за крайней неоднородности почвенных условий для поддержания определенной толщины слоя требуются разные значений режима, следовательно, и разные значения поворота вала дросселя, добиться чего без оста новки машины и изменения кинематики невозможно. Этим объясняется наличие второго канала регулирования, посредством которого вал мотора-редуктора останавливается только лишь при нулевом 59 (настроечном) положении датчика относительно преобразователя. Таким образом, скорость регулирования увеличивается, и достигается тот режим, при котором поддерживается установленная толщина сепарируемого слоя на элеваторе независимо от почвенных условий,, т.е. повысится точность регулирования. Однако при резких изменениях физикомеханических свойств поступающей рабочей массы, например, при наличии участков с легкой почвой и наоборот, диапазон изменения режима рабочего органа недостаточно и возникает потребность умень шить (повысить) скорость движения машины для изменения загрузки. В этом .случае вал мотора-редуктора 10 дост№гает критических углов поворюта и ки- нематически передвигает рвижок преобрт- зователя 18. Сигнал с преобразователя через усилитель 19 и схему преобразования 20 воздействует на исполнительный электропривод 21 и посредством механизма аварийной остановки 22 действует на рычаг 12 гидронасоса 11, изменяя поступательную скорость, а следовательно, и загрузку машины. В случае превышения максимально допустимого уровня загрузки с целью (Предотвращения .а абивания рабочих , сигнал с регулируемого контакта 23 поступает на механизм аварийной остановки 22, воздействуя на электромагнитный разъединяющий элемент, и тем самым освобождая рычааг 12, который, возвращаясь в нулевое положение, останавливает машину. Доработка уже поступившей рабочей массы происходит на месте, что исключает перегрузку ра бочих органов машины. Аналогичная остановка осуществляет ся при наличии сигнала с одного из датчиков 24 или системы УСАК. Применение устройства позволит подвысить точность и эффективность регулирования процесса сепарашш в корнекпуб336неуборочных машинах, что улучшит качеотво уборки и повысит Производительность уборочной машины и увеличит долговечность узлов. формула изобретения 1. Устройство для автоматического регулирования технологического режима корнеклубнеуборочной машины, содержащее гидротрансмиссию привода ведзгщнх колес с гидронасосом и мотором, установленный над сепарирующим рабочим органом датчин толщины слоя, связанный через преобразователь, механизм сравнения, усилитель. и мотор-редуктор с гидравлическим дрооселем управления исполнительным меха- низмом привода рабочего органа, отлияающееся тем, что, с целью повышения эффективности работы, оно дополнительно снабжено последовательно соединенными прео&разователем с регулируемым контактом, усилителем, схемой преобразования, исполнительным электроприводом с механизмом аварийной остановки и датчиками технологического контроля, причем дополнительный преобразователь кинематически связан с валом мотора-редуктора, один вход механизма аварийной остановки соединен с регулируемым контактом преобразователя. другой - с выходами датчиков технологического контроля, а выход связан посредством рычага управления гидронасоса, с мотором гидротрансмиссии ведущих колес. 2. Устройство по п. 1, отличающееся тем, что механизм аварийной остановки вьшолнен в виде электромагнитной муфты. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР по заявке № 2971О4О/30-15, кл. А О1 D 33/08, 198О. 2.Авторское свидетельство СССР по заявке № 2963715/30-15, кл. А О1 U 33/О8, 1980 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования технологического режима сепарирующего органа корнеклубнеуборочной машины | 1980 |
|
SU886796A1 |
| Устройство автоматического управления загрузкой самоходной сельскохозяйственной машины | 1982 |
|
SU1015849A1 |
| Устройство для автоматического регулирования режимов работы рабочего органа сельскохозяйственной машины | 1981 |
|
SU1028268A1 |
| РЕКУПЕРАТИВНАЯ РЕВЕРСИВНАЯ БЕССТУПЕНЧАТАЯ ГИДРОТРАНСМИССИЯ КОЛЕСНОЙ МАШИНЫ | 2003 |
|
RU2259928C2 |
| Механизм сброса частоты вращения гидронасоса гидрообъемной передачи сельскохозяйственной машины | 1982 |
|
SU1302589A1 |
| ШАРНИРНО-СОЧЛЕНЕННАЯ МАШИНА | 1991 |
|
RU2015053C1 |
| ПОГРУЗОЧНАЯ МАШИНА | 1995 |
|
RU2097569C1 |
| МЕХАТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2015 |
|
RU2645487C2 |
| Привод управления исполнительным органом землеройной машины | 1988 |
|
SU1709037A1 |
| Гидрообъемный привод транспортного средства | 1987 |
|
SU1414665A1 |