(Б) АВТОМАТИЧЕСКОЕ САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО
ДЛЯ.ПОДДЕРЖАНИЯ ОПТИМАЛЬНОЙ НАГРУЗКИ
КАРТОФЕЛЕУБОРОЧНОГО КОМБАЙНА
I
Изобретение относится к автоматическим самонастраивающимся системам поддержания оптимальной нагрузки уборочных машин и может быть использовано, в частности, для контроля и управления нагрузкой картофелеуборочных комбайнов.
Известны устройства для регулирования нагрузки уборочной машины, осуществляющие контроль и поддержание необходимого количества технологичес-; кой массы, поступающей в комбайн 1.
Недостатком таких устройств является то, что с их помощью контроли руется только объем поступающей в комбайн массы. Совсем не учитываются ее физико-механические качества, оказывающие существенное влияние на нагрузку рабочих органов комбайна и качество выполнения технологического процесса. Вследствие колебаний профиля грудок, микро- и макронеровностей поверхности поля, нестабильного коэффициента буксования колес трактора периодически происходят измене- . ния объема клубненосной массы, поступающей в комбайн, что является основным возмущением, вызывающим колебания нагрузки. Однако принять определенную толщину в передней части сепаратора за номинал, который следует поддерживать во время работы, не представляется возможным из-за переменных качеств почвы по степени
to сепарации.
Известно также устройство для автоматического поддержания оптимальной нагрузки картофелеуборочного кок байна, содержащее измерительный преISобразователь толщины слоя на сходе рабочего органа и исполнительный механизм изменения режима работы 12.
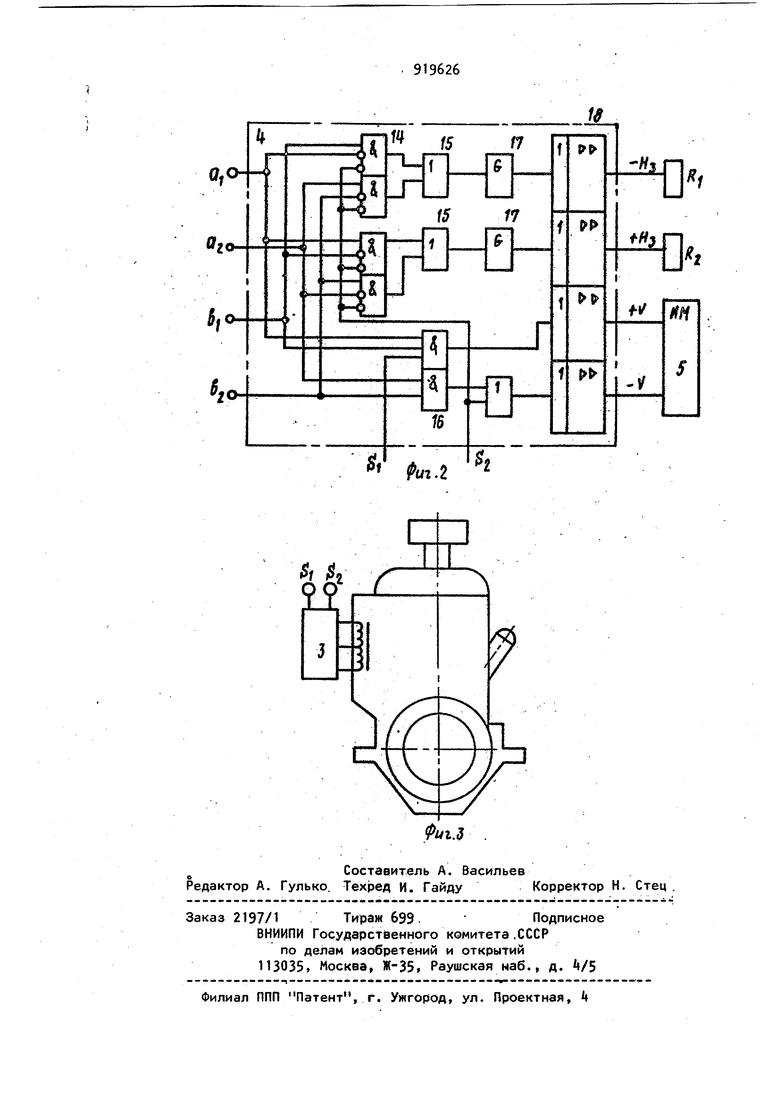
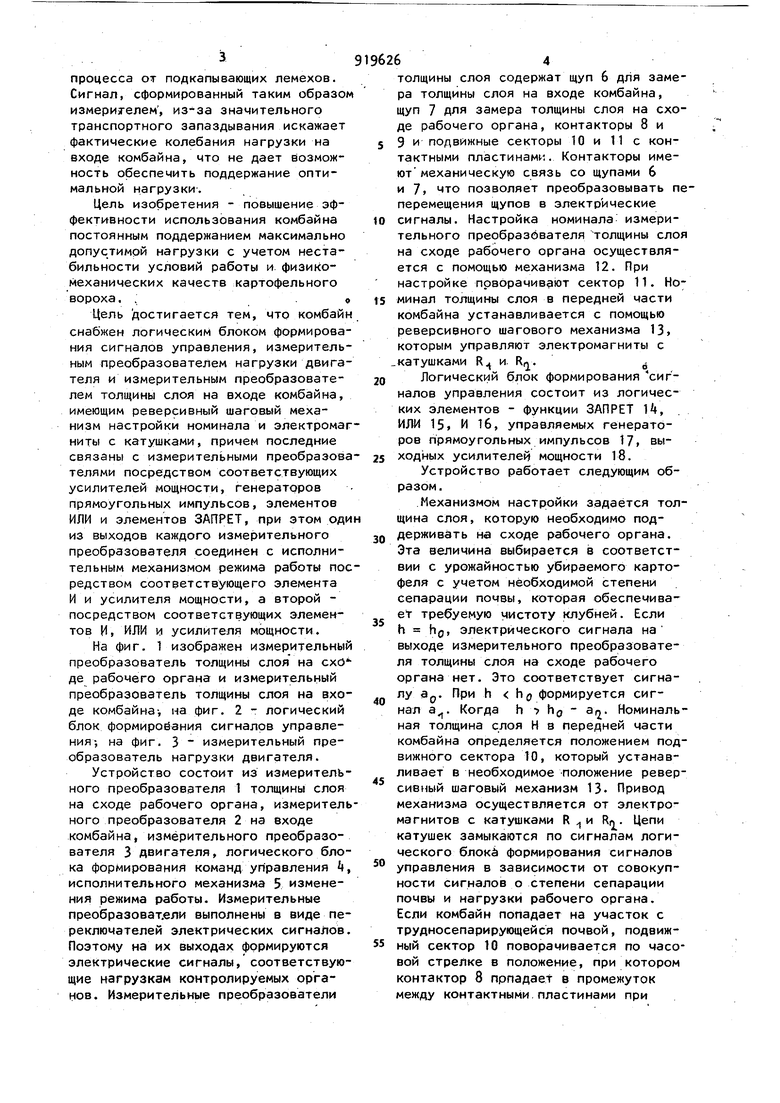
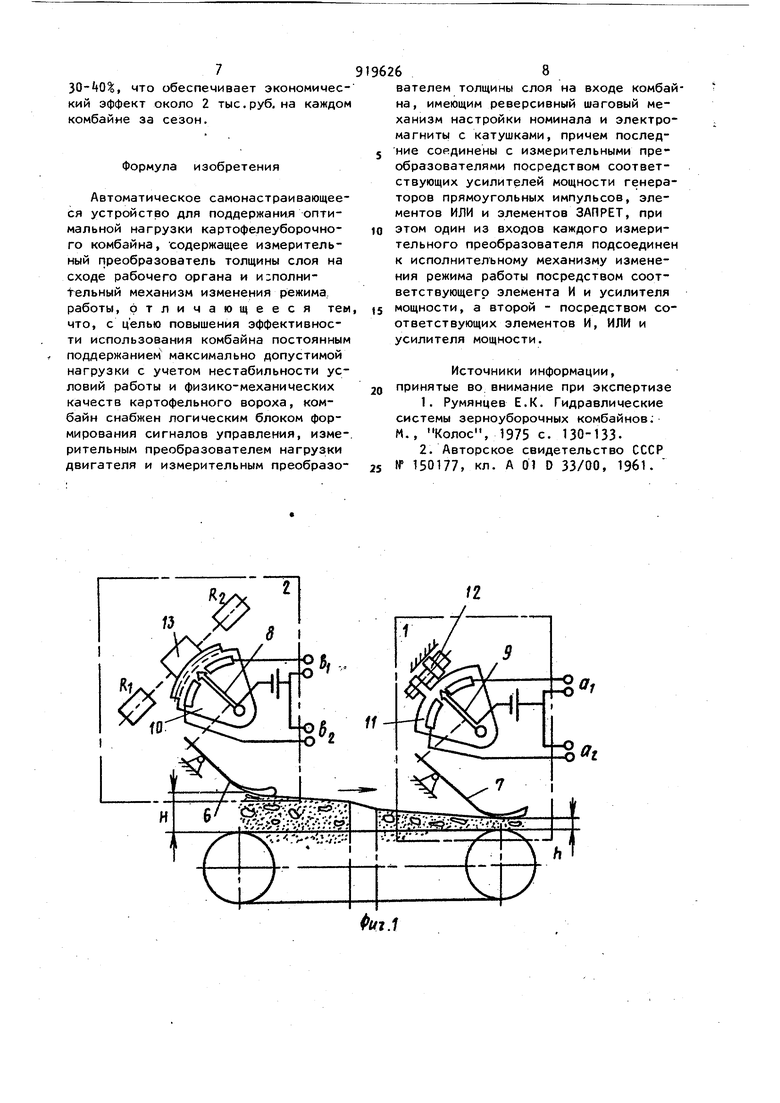
Недостатком этого устройства является то, что сигнал формируется из20мерителем толщины слоя с большим запаздыванием, так как измеритель толщины слоя расположен на значительном расстоянии по ходу технологического процесса от подкапывающих лемехов. Сигнал, сформированный таким образом измерителем , из-за значительного транспортного запаздывания искажает фактические колебания нагрузки на входе комбайна, что не дает бозможность обеспечить поддержание оптимальной нагрузки. Цель изобретения - повышение эффективности использования комбайна постоянным поддержанием максимально допустимой нагрузки с учетом нестабильности условий работы и физикомеханических качеств картофельного вороха. .. о Цель достигается тем, что комбайн снабжен логическим блоком формирования сигналов управления, измерительным преобразователем нагрузки двигателя и измерительным преобразователем толщины слоя на входе комбайна, имеющим реверсивный шаговый механизм настройки номинала и электромаг ниты с катушками, причем последние связаны с измерительными преобразова телями посредством соответствующих усилителей мощности, генераторов прямоугольных импульсов, элементов ИЛИ и элементов ЗАПРЕТ, при этом оди из выходов каждого измерительного преобразователя соединен с исполнительным механизмом режима работы пос редством соответствующего элемента И и усилителя мощности, а второй посредством соответствующих элементов И, ИЛИ и усилителя мощности. На фиг. 1 изображен измерительный преобразователь толщины слоя на схо де рабочего органа и измерительный преобразователь толщины слоя на входе комбайна-, на фиг. 2 - логический блок формирования сигналов управления-, на фиг. 3 измерительный преобразователь нагрузки двигателя. Устройство состоит из измерительного преобразователя 1 толщины слоя на сходе рабочего органа, измеритель ного преобразователя 2 на входе комбайна, измерительного преобразователя 3 двигателя, логического блока формирования команд управления Ц исполнительного механизма 5 изменения режима работы. Измерительные преобразоват.еяи выполнены в виде переключателей электрических сигналов Поэтому на их выходах формируются электрические сигналы, соответствующие нагрузкам контролируемых органов. Измерительные преобразователи 64 толщины слоя содержат щуп 6 для замера толщины слоя на входе комбайна, щуп 7 для замера толщины слоя на сходе рабочего органа, контакторы 8 и 9 и подвижные секторы 10 и 11 с контактными пластинами. Контакторы имеют механическую связь со щупами 6 и 7, что позволяет преобразовывать пеперемещения щупов в электрические сигналы. Настройка номинала измерительного преобразователя толщины слоя на сходе рабочего органа осуществляется с помощью механизма 12. При настройке поворачивают сектор 11. Номинал толщины слоя в передней части комбайна устанавливается с помощью реверсивного шагового механизма 13, которым управляют электромагниты с катушками R и. RQ. Логический блок формирования сигналов управления состоит из логических элементов - функции ЗАПРЕТ Н, ИЛИ 15, И 16, управляемых генераторов прямоугольных импульсов 17, выходных усилителей мощности 18. Устройство работает следующим образом. Механизмом настройки задается толщина слоя, которую необходимо поддерживать на сходе рабочего органа. Эта величина выбирается в соответствии с урожайностью убираемого картофеля с учетом необходимой степени сепарации почвы, которая обеспечиваet требуемую чистоту клубней. Если h h{j, электрического сигнала на выходе измерительного преобразователя толщины слоя на сходе рабочего органа нет. Это соответствует сигналу а. При h HO формируется сигНоминаль. Когда h HO - a,j. нал а. ная толщина слоя Н в передней части комбайна определяется положением подвижного сектора 10, который устанавливает в необходимое положение реверсивный шаговый механизм 13. Привод механизма осуществляется от электромагнитов с катушками R и Rf,. Цепи катушек замыкаются по сигналам логического блоки формирования сигналов управления в зависимости от совокупности сигналов о степени сепарации почвы и нагрузки рабочего органа. Если комбайн попадает на участок с трудносепарирующейся почвой, подвижный сектор 10 поворачивается по часовой стрелке в положение, при котором контактор 8 прпадает в промежуток между контактными,пластинами при 59 меньшей толщине слоя Н. Это приводит к снижению Нд. Следовательно уменьшается поступление клубненосной массы в комбайн, что обеспечивает необходимую степень сепарации. На сходе рабочего органа сохраняется требуема толщина слоя h. При попадании на участок с легко сепарирующейся почвой подвижный сектор 10 поворачивает ся против часовой стрелки, что вызьивает соответственно возрастание HQ. Таким образом, компенсируются колеба ния свойств подкапываемого пласта по степени сепарации. Измерительный преобразователь . толщины слоя на входе сепаратора выдает один из трех сигналов. При Н НО-ВР, Н Н о - & Н -Н о - в При работе комбайна также контролируется нагрузка двигателя. Измер1Ительный преобразователь 3 нагрузки двигателя выдает один из трех сигналов: S при М MQ, SQ при МА. J.D 5 при М MQ. 8 устройстве принята двоийная сис тема выдачи сигналов о нагрузке конт ролируемых рабочих органов. При недогрузке и перегрузке формируются электрические сигналы, которые услов но обозначаются соответственно индек При. номинальной нагрузке сигнал о тсутствует. Условно он обозначается индексом О. Сигналы измерительных преобразователей поступают в логический блок формирования сигналов управления, в котором по сочетанию сигналов формируется сигнал управления, скорость движения и сигнал настройки системы на определенный номинал Нд. Для формирования сигнала может быть задана любай желательная программа. Изучение технологического процесса картофелеуборочного комбайна позволяет на метить программу формирования сигналов управления, которая представлена в таблице. Продолжение табл. В соответствии с приведенной ta iлицей , блок формирует сигнал на увеличение скорости только при недогрузке рабочего органа (h «h), (.Н HO) , а также недогрузке двигателя (наличие сигнала S). Снижение скорости происходит при перегрузке рабочего органа (h h(j и Н ) Нд) или при перегрузке двигателя (наличие сигнала Sij) вне зависимости от нагрузки рабочего органа. 8 остальных случаях сочетания сигналов формируется команда на повышение или понижение Н . Такую программу реализует логический блок формирования команд. Блок выдает один из четырех сигналов: 4 HO или -HO соответственно на повышение или понижение толщины слоя, которую необходимо поддерживать в передней части рабочего органа, 4V или - V - . на увеличение или понижение рабочей скорости. Сигналы +HO и -Нд формируются , из сигналов а и зп, 8 и BO ° мощью цепочки, в которую входят элементы, реализующие функцию ЗАПРЕТ, ИЛИ, а также управляемые генераторы прямоугольных импульсов. Последние превращают непрерывные сигналы в импульсные, что необходимо для работы импульсного реверсивного шагового механизма 13 управления положением подвижного сектора 10. Сигнал +V формируется с помощью элемента И, а сигнал -V с помощью элементов И и ИЛИ, При поступлении сигналов -fV или -V исполнительный механизм 5 производит соответствующее изменение рабочей скорости агрегата. Предлагаемое устройство за счет поддержания максимальной нагрузки ком байна и предотвращения технологических отказов (забиваний) позволяет повысить его производительность на
79
, что обеспечивает экономический эффект около 2 тыс.руб, на каждом комбайне за сезон.
Формула изобретения
Автоматическое самонастраивающееся устройство для поддержания оптимальной нагрузки картофелеуборочного комбайна, содержащее измерительный преобразователь толщины слоя на сходе рабочего органа и исполнительный механизм изменения режима работы, отличающееся тем что, с целью повышения эффективности использования комбайна постоянным поддержанием максимально допустимой нагрузки с учетом нестабильности условий работы и физико-механических качеств картофельного вороха, комбайн снабжен логическим блоком формирования сигналов управления, измерительным преобразователем нагрузки двигателя и измерительным преобразо68
вателем толщины слоя на входе комбайна, имеющим реверсивный шаговый механизм настройки номинала и электромагниту с катушками, причем последние соединены с измерительными преобразователями посредством соответствующих усилителей мощности генераторов прямоугольных импульсов, элементов ИЛИ и элементов ЗАПРЕТ, при
этом один из входов каждого измерительного преобразователя подсоединен к исполнительному механизму изменения режима работы посредством соответствующего элемента И и усилителя
мощности, а второй - посредством соответствующих элементов И, ИЛИ и усилителя мощности.
Источники информации, принятые во внимание при экспертизе
1.Румянцев Е.К. Гидравлические системы зерноуборочных комбайнов. М., Колос, 1975 с. 130-133.
2.Авторское свидетельство СССР № 150177, кл. А 01 D 33/00, 1961. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления загрузкой самоходной уборочной машины | 1987 |
|
SU1628911A1 |
| Система автоматического управления режимами работы уборочной машины | 1983 |
|
SU1281197A1 |
| Устройство для автоматического управления загрузкой картофелеуборочного комбайна | 1976 |
|
SU605572A1 |
| Устройство для автоматического контроля и управления загрузкой корнеклубнеуборочной машины | 1981 |
|
SU986330A1 |
| Устройство автоматической стабилизации загрузки самоходного картофелеуборочного комбайна | 1982 |
|
SU1102513A1 |
| Устройство для автоматического контроля и управления самоходной уборочной машиной | 1977 |
|
SU701569A1 |
| Устройство для автоматического управления загрузкой самоходной уборочной машины | 1989 |
|
SU1743450A1 |
| Устройство для автоматического управления загрузкой картофелеуборочного комбайна | 1983 |
|
SU1132826A1 |
| Устройство автоматического управления выемочной машиной | 1977 |
|
SU750065A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1983 |
|
SU1123021A1 |