Изобретение касается механизмов преобразования вращательного движения в иные виды движения, в частности в равномерное поступательное движение и предназначено для применения в качестве компенсатора колебаний для колесно-шаговых движителей. В различных конструкциях колесно-шаговых движителей предполагается использование различных передвигающихся опор вместо обода колеса. Простейший вариант такого движителя - колесо без обода состоящее из спиц, на которые движитель опирается в процессе своего движения. Отсутствие обода дает определенное преимущество при движении по неровным и нетвердым поверхностям, но приводит к возникновению нежелательных колебаний оси и всей конструкции. Для избавления от данных колебаний необходим дополнительный механизм - компенсатор колебаний.
Известно «Шасси для передвижения по различным опорным поверхностям с колесно-шаговыми движителями» (патент №RU 2628285 С2), в котором предлагается несколько вариантов компенсатора колебаний, возникающих при передвижении опор. В данном патенте шасси транспортного средства содержит колесно-шаговые движители. Каждый колесно-шаговый движитель состоит по меньшей мере из трех опор, закрепленных на общем валу симметрично относительно оси вращения вала и наклонно друг к другу, образуя боковые ребра воображаемой пирамиды. При этом вал расположен под углом к опорной поверхности таким образом, чтобы опорной поверхности касались не более двух опор от каждого колесно-шарового движителя одновременно. Причем вал закреплен подвижно с возможностью поперечных движений и кинематически связан с компенсатором колебаний. Компенсатор колебаний закреплен на шасси.
В одном варианте компенсатора колебаний предполагает использование четного количества колесно-шаговых движителей, каждая пара имеет общий компенсатор колебаний, который состоит из общего рычага, качающегося на неподвижной оси, закрепленной на раме шасси. В этом случае, в каждой паре колесно-шаговых движителей выходные валы приводятся в синхронное вращение от общего привода, а опоры на данных валах устанавливают в противофазе.
Недостатком такого механизма является обязательная синхронизация движения колесно-шаговых движителей в своей паре, что существенно затрудняет перемещение на поверхностях со сложным рельефом. Кроме того, такая схема парного расположения и синхронизации движителей делает невозможной реализацию маневрирования путем поворота отдельных движителей относительно шасси транспортного средства.
Наиболее близким к предлагаемому устройству является вариант компенсатора колебаний (патент №RU 2628285 С2), в котором преобразуют вращение входного вала в сложное вращательно-возвратно-поступательное движение выходного вала, на котором закреплены опоры за счет кулачкового механизма. В данном варианте компенсатор колебаний состоит из рычага, качающегося на неподвижной оси, закрепленной на раме шасси. На свободном конце рычага закреплена ступица, в которой на выходном валу вращаются опоры. Сверху на рычаг действует возвратная пружина, а снизу на рычаг действует кулачковый механизм, состоящий из трех роликов и вращающийся на валу, проходящему через раму шасси. Вал и кулачковый механизм приводятся во вращение от общего привода и вращаются синхронно с одинаковой частотой, что позволяет сгладить вертикальные колебания вала. Кулачковый механизм с помощью роликов поднимает рычаг вверх когда опора, касающаяся поверхности из наклонного положения переходит в вертикальное, а возвратная пружина опускает рычаг вниз когда опора, касающаяся поверхности из вертикального положения переходит в наклонное.
Недостатком такого механизма является быстрый износ кулачкового механизма и пружины, высокий коэффициент трения, а также наличие существенных остаточных вертикальных колебаний выходного вала. В частности, амплитуда данных колебаний составляет не менее 30% от длины опор. Кроме того, прямая передача вращения входного вала на выходной вал создает значительные колебания в скорости перемещения опорных точек на концах опор относительно корпуса механизма, т.к. опоры при вращении касаются поверхности под разным углом (от 30 до 90 градусов для трех опор). Это приводит к возникновению двукратного изменения линейной скорости при постоянной угловой скорости входного вала в зависимости от текущего положения опоры, а соответственно и наличию как минимум двукратных колебаний нагрузки на входном валу. И наконец, работа механизма предполагает постоянное сцепление опор с поверхностью, что не всегда возможно.
Задачей настоящего изобретения является создание принципиально нового способа и устройства компенсации колебаний, в котором будут устранены недостатки прототипа: высокие износ деталей и коэффициент трения, а также максимально снижены вертикальные колебания вала, скоростные колебания и колебания нагрузки на выходном валу.
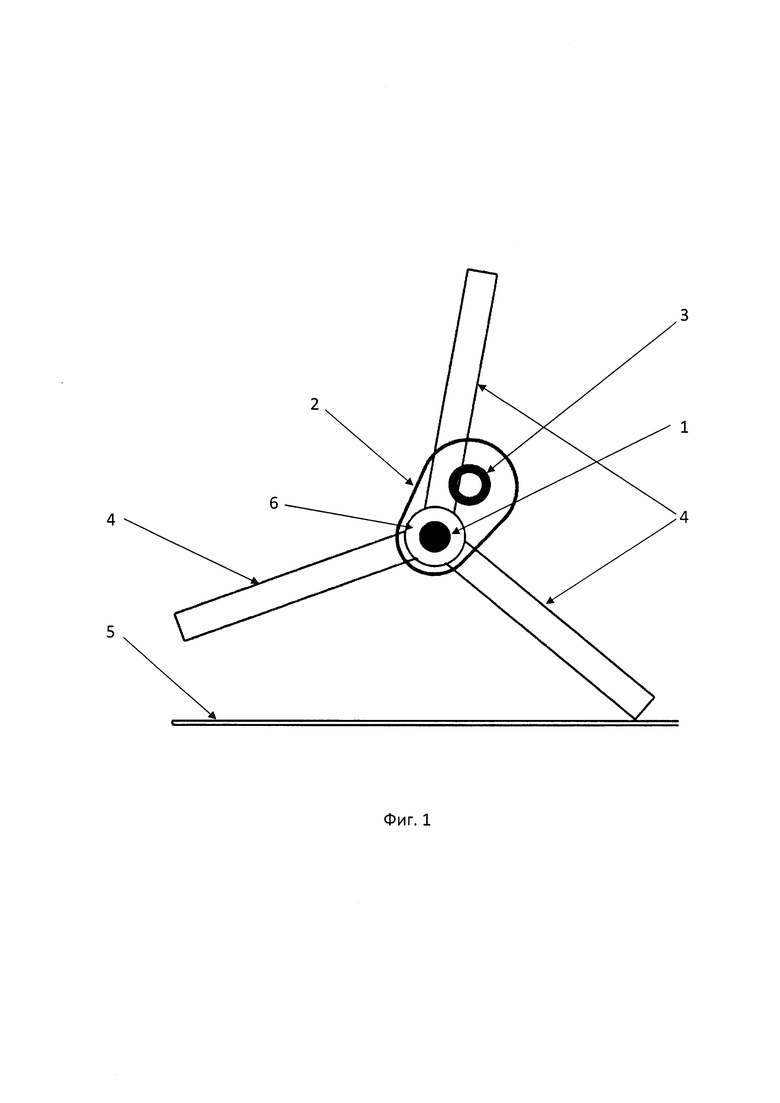
Указанные задачи достигаются тем, что в предлагаемом устройстве компенсации колебаний выходной вал 1 (фиг. 1) закреплен на кривошипе 2, приводимом во вращение входным валом 3. Опоры 4 закреплены на выходном валу 1. При вращении выходного вала 1 одна либо две опоры 4 касаются поверхности 5. Выходной вал 1 приводится во вращение вариатором 6. Вариатор 6 изменяет угловую скорость выходного вала 1 в зависимости от текущего положения кривошипа 2 и его текущей угловой скорости. При этом кривошип 2 и выходной вал 1 выполнены с возможностью вращения в одном направлении, а выходной вал 1 вращается медленнее чем кривошип 2, в частности при количестве опор 4 равном трем за один полный оборот кривошипа 2 выходной вал 1 должен провернуться на 1/3 оборота, но с плавающей угловой скоростью. Максимальную угловую скорость вариатор 6 должен создавать в верхнем положении кривошипа 2, когда одна из опор 4, касающаяся поверхности 5 находится в вертикальном положении, а минимальную угловую скорость - в нижнем положении кривошипа 2, когда две опоры 4 одновременно касаются поверхности 5. При соблюдении данных условий и правильно подобранных параметров обеспечивается решение поставленных задач.
Если выходной вал 1 приводится во вращение отдельным приводом, например электрическим сервоприводом, то для изменения угловой скорости сервопривода может быть использован электронный вариатор. Для регулирования скорости вращения сервопривода - электронный вариант подключается к энкодеру, отслеживающему текущее положение кривошипа 2 и его угловую скорость относительно корпуса устройства компенсации колебаний.
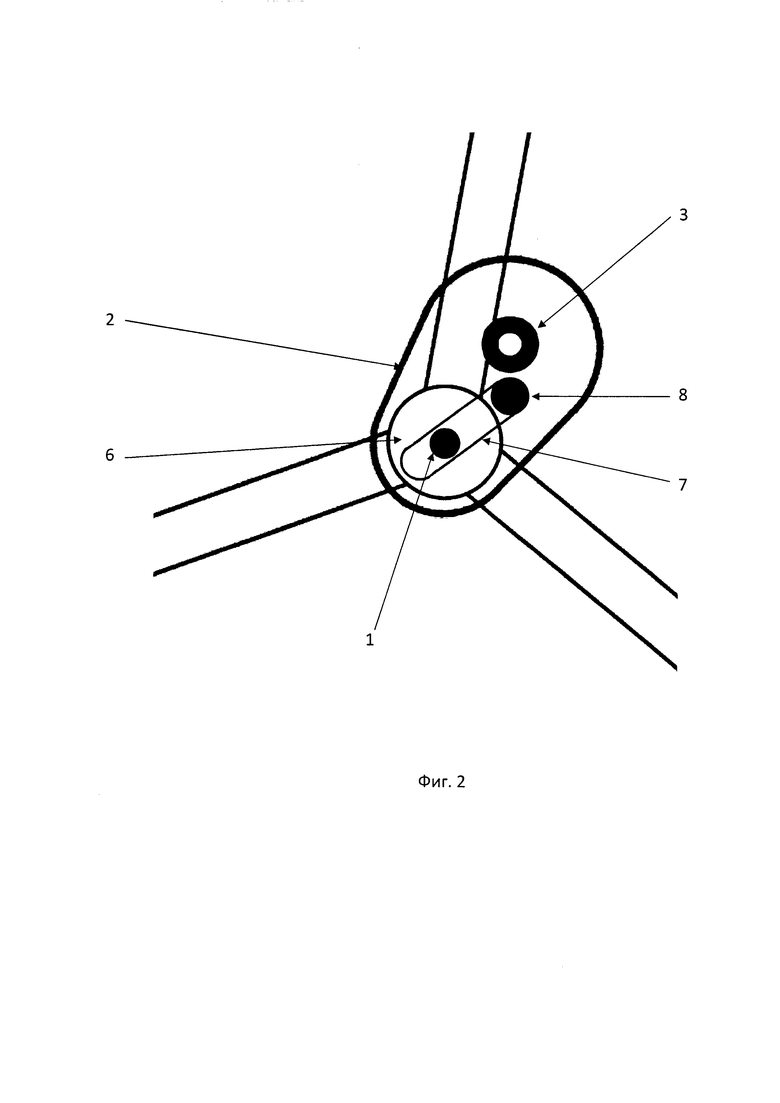
В случае, если выходной вал 1 получает мощность и приводится во вращение от входного вала 3 через трансмиссию и вариатор 6, то для управления вариатором 6 предлагается использовать управляющий шатун 7 (фиг. 2). Для этого ось 8 шатуна 7 должна быть закреплена в корпусе устройства компенсации колебаний на заранее определенном расстоянии от входного вала 3. Данное расстояние позволяет отрегулировать характер изменения угловой скорости выходного вала 1. Другой конец шатуна 7 проходит через ось выходного вала 1. Благодаря данной компоновке угол между шатуном 7 и кривошипом 2 изменяется в соответствии с требуемым изменением угловой скорости выходного вала 1.
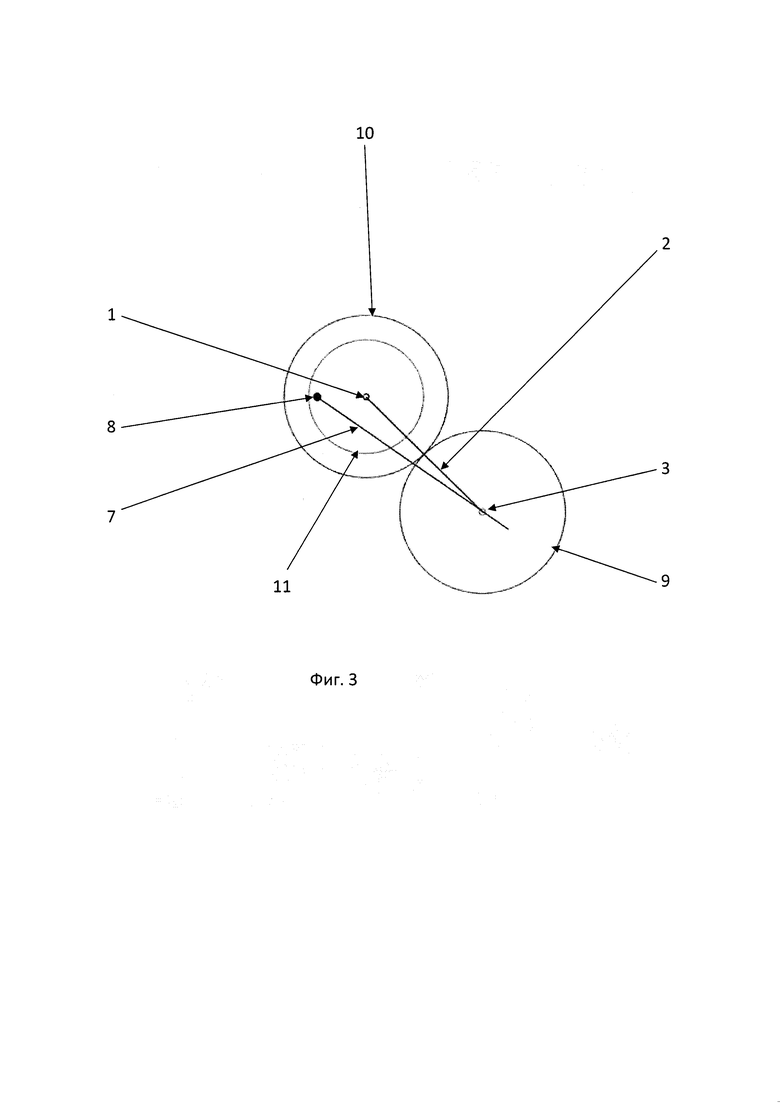
Другой вариант управления угловой скоростью выходного вала 1 возможен с помощью вариатора 6, состоящего из планетарного механизма. Данный планетарный механизм состоит из неподвижной солнечной шестерни 9 (фиг. 3), закрепленной на корпусе устройства компенсации колебаний соосно с входным валом 3 и по меньшей мере одного сателлита 10, закрепленного на водиле. Диаметр сателлита предлагается использовать такого же размера, что и диаметр солнечной шестерни 9. В качестве водила используется кривошип 2. Вращение сателлита может быть использовано для изменения угловой скорости выходного вала 1.
Далее показаны варианты, в которых вариатор заменен на редуктор, управляемый шатуном 7. В общем случае устройство компенсации колебаний включает в себя планетарный механизм, на сателлите 10 планетарного механизма крепится редуктор 11, а выходной вал редуктора 11 является выходным валом 1. Один конец управляющего шатуна 7 взаимодействует с редуктором 11, в частности с одним из его элементов, а второй конец шатуна 7 ограничивается осью, неподвижной относительно корпуса устройства компенсации колебаний. Данная ось может являться входным валом 3. В этом случае конец шатуна 7 имеет направляющую с пазом, который позволяет шатуну 7 проходить через входной вал 3. Возможен вариант, при котором направляющая проходит через ось, отстоящую на заранее определенном расстоянии от входного вала 3. Также возможен вариант, при котором управляющий шатун 7 выполнен с изменяемой длиной, например телескопическим. В этом случае второй конец шатуна свободно крепится на оси входного вала 3 либо на отдельной оси. Для свободного крепления может быть использован подшипник. Механизмы взаимодействия противоположного конца управляющего шатуна 7 с одним из элементов редуктора 11 зависят от типа используемого редуктора. Далее на конкретных примерах показано каким образом могут быть использованы управляющий шатун 7 и планетарный механизм для управления угловой скорости выходного вала 1. Показанные под варианты отличаются типом редуктора 11 и способами крепления управляющего шатуна 7.
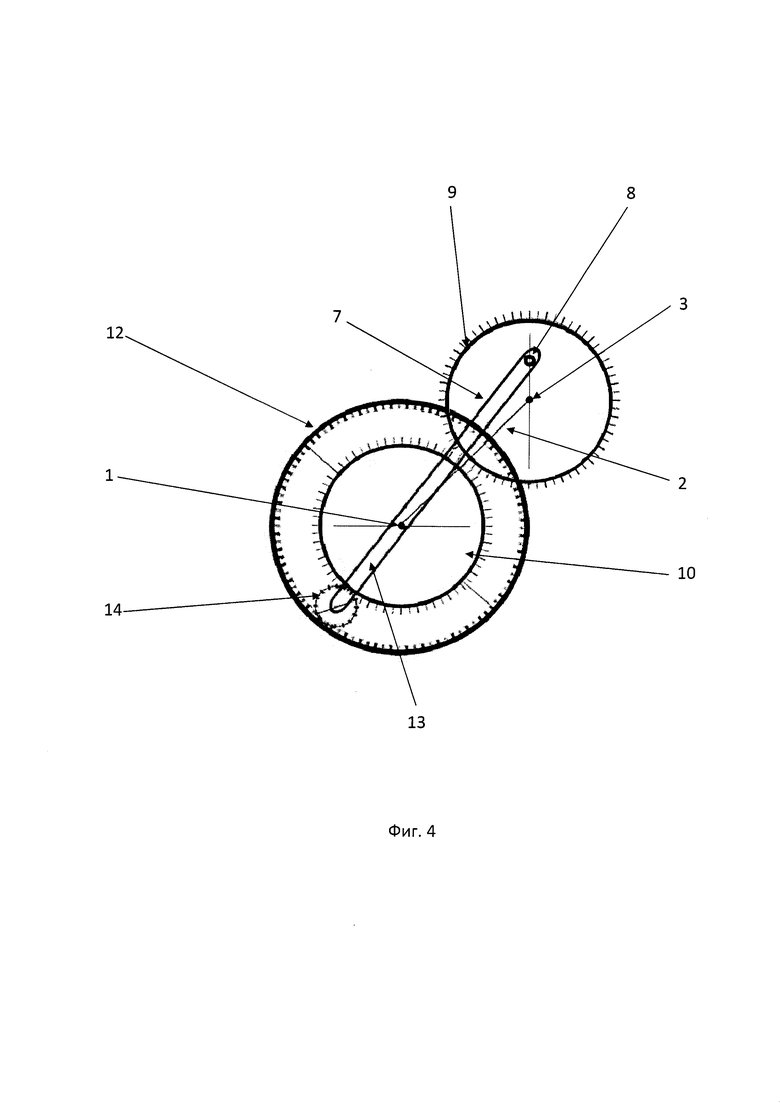
По первому под варианту в качестве редуктора 11 использован планетарный редуктор. Простой планетарный редуктор имеет три основных элемента: центральную солнечную шестерню, водило и экпициклическую центральную шестерню. В показанном примере сателлит 10 (фиг. 4), на котором крепится планетарный редуктор одновременно является центральной солнечной шестерней данного планетарного редуктора. А эпициклическая шестерня 12 планетарного редуктора соединена с выходным валом 1. При этом конец управляющего шатуна 7 фиксируется с водилом 13. На водиле 13 закреплен по меньшей мере один сателлит 14. Для получения необходимого передаточного числа на водиле 13 могут быть использованы парные сателлиты 14 разного диаметра, образуя двухрядный планетарный редуктор. Для того чтобы планетарный механизм и планетарный редуктор не мешали друг другу - сателлит 10 должен выступать над солнечной шестерней 9, чтобы водило 13 с сателлитом 14 могло без препятствий делать обороты вокруг сателлита 10 не задевая солнечную шестерню 9. При количестве опор 4 равном трем и равном диаметре шестерен 9 и 10 - соотношение центральной эпициклической шестерни 12 к центральной солнечной шестерне планетарного редуктора должно составлять 3 к 2. Данное соотношение позволяет получить 1/3 оборота выходного вала 1 за один полный оборот кривошипа 2.
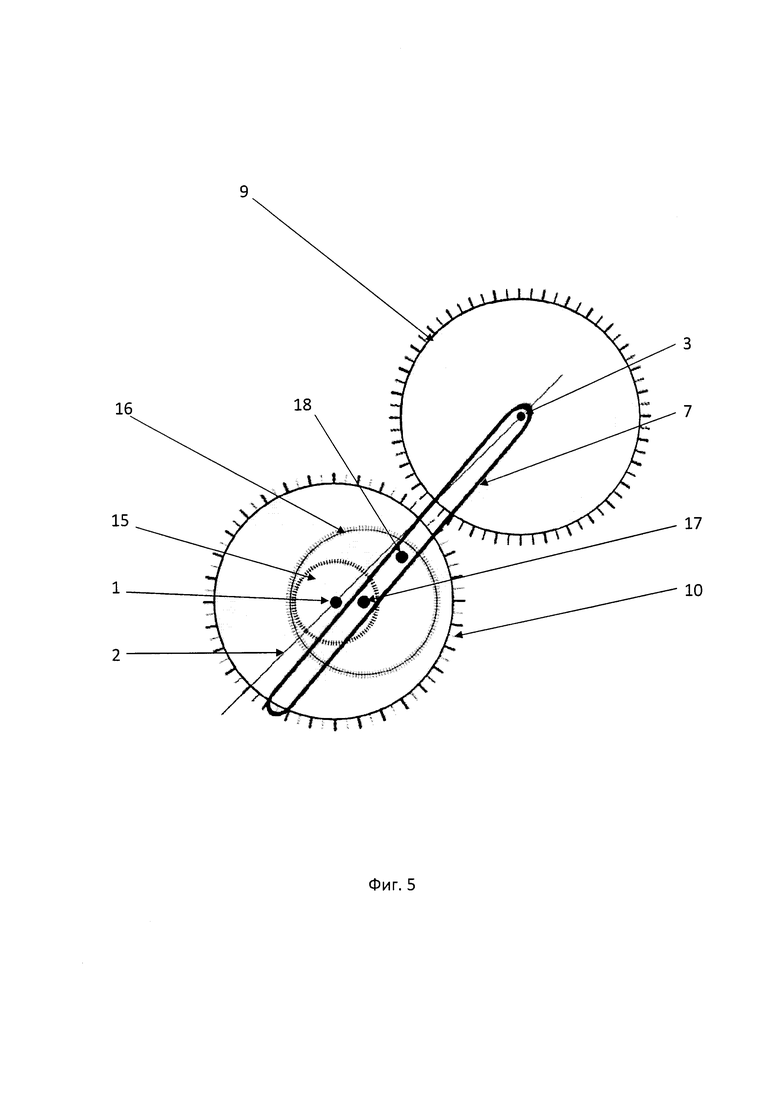
Следующий под вариант предполагает использование иного типа редуктора 11, состоящего из ведомой шестерни 15 (фиг. 5), расположенной соосно с сателлитом 10 и соединенной с выходным валом 1. Редуктор также включает в себя ведущую эпициклическую шестерню 16. Ось 17 данной шестерни крепится эксцентрически на сателлите 10 на заранее определенном расстоянии от выходного вала 1 и зубьями, обращенными внутрь входит в зацепление с ведомой шестерней 15. Расстояние от оси 17 до центра ведомой шестерни 15 влияет на характер изменения угловой скорости выходного вала 3. Конец управляющего шатуна 7 взаимодействует с ведущей эпициклической шестерней 16. Данное взаимодействие заключается в том, что управляющий шатун 7 задает направление ведущей эпициклической шестерне 16. Способов как это может быть сделано есть несколько, каждый из них не меняет сути настоящего изобретение. На фиг. 5 показан способ, при котором на ведущей эпициклической шестерней 16 есть две цапфы 17 и 18, а управляющий шатун 7 имеет паз. Данный паз проходит через обе цапфы 17 и 18, таким образом любой поворот управляющего шатуна 7 автоматически поворачивает эпициклическую шестерню 16 на такой же угол. Такой паз может быть на другом конце управляющего шатуна 7, и он может этим пазом проходить через входной вал 3. В этом случае управляющий шатун 7 может быть жестко зафиксирован с эпициклической шестерней 16. При количестве опор 4 равном трем и равном диаметре шестерен 9 и 10 - соотношение ведущей эпициклической шестерни 16 к ведомой шестерне 15 должно составлять 5 к 3. Данное соотношение позволяет получить 1/3 оборота выходного вала 1 за один полный оборот кривошипа 2.
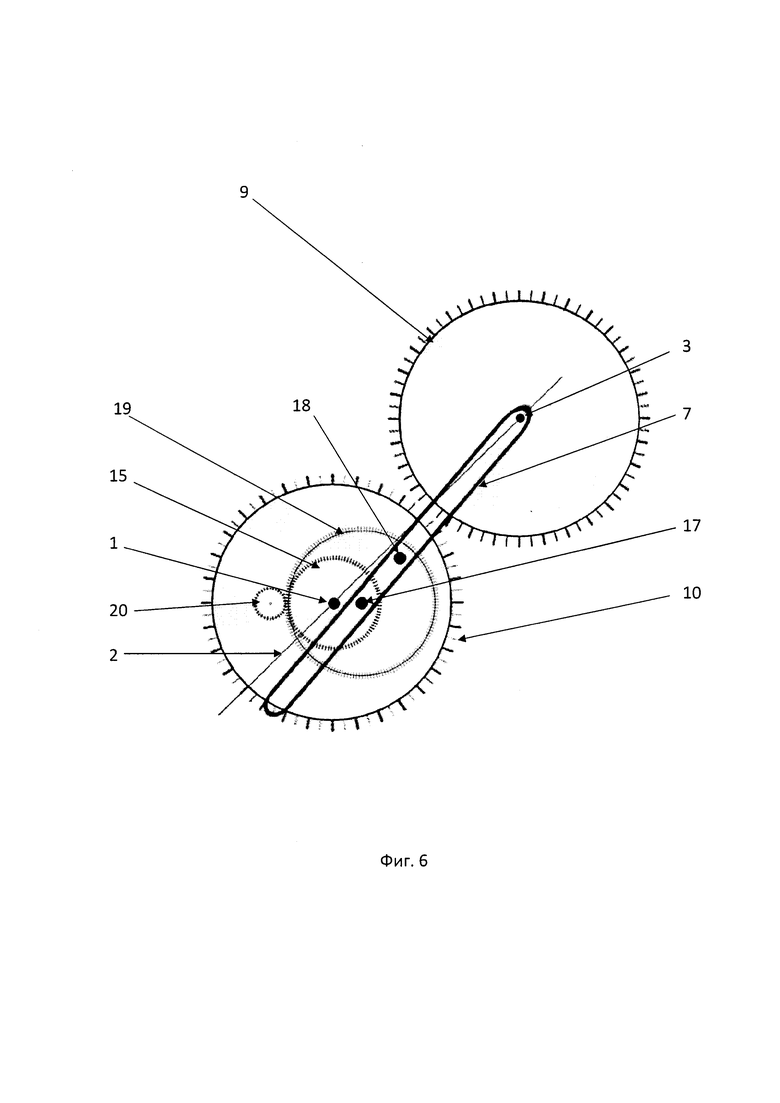
Следующий под вариант отличается от предыдущего тем, что вместо ведущей эпициклической шестерни 16 использована шестерня 19 (фиг. 6) с зубьями, обращенными наружу. Ее ось расположена также, но сама шестерня 19 должна находится в параллельной плоскости относительно ведомой шестерни 15. А взаимодействуют ведущая шестерня 19 и ведомая шестерня 15 через одну или более промежуточную шестерню 20. Ось промежуточной шестерни 20 крепится на сателлите 10. В остальном данный и предыдущий под варианты аналогичны друг другу. При количестве опор равном трем соотношение ведущей шестерни 16 к ведомой шестерне 15 также составляет 5 к 3.
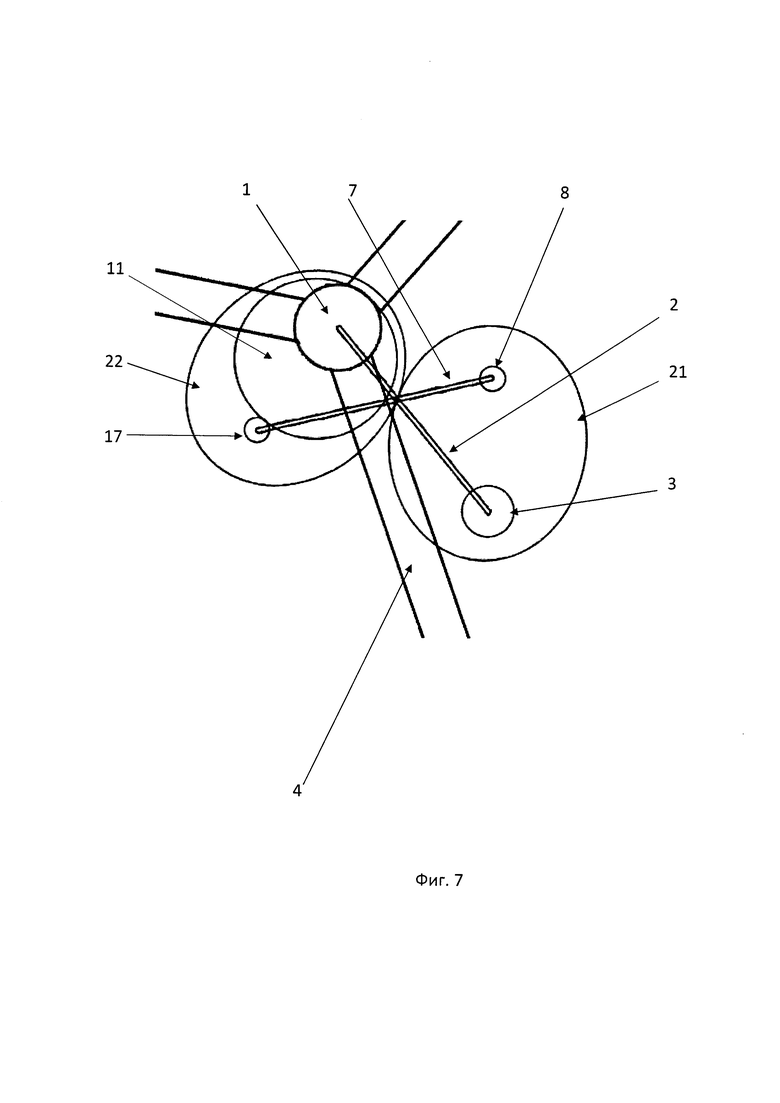
Еще один вариант касается формы шестерен планетарного механизма. Предлагается использовать неподвижную солнечную шестерню 21 (фиг. 7) эллиптической формы. И входящую в зацепление с ней сателлита 22 такой же эллиптической формы и такого же размера. Использование эллиптической формы позволяет сделать управляющий шатун 7 фиксированного размера и без пазов. И кривошип 2 и управляющий шатун 7 в данной схеме имеют одинаковый размер и крепятся эксцентрично, в точках фокуса данных эллиптических шестерен планетарного механизма, в противоположных фокусах. На сателлите 22 крепится редуктор 11, который управляется шатуном 7 и вращает выходной вал 1 с опорами 4.
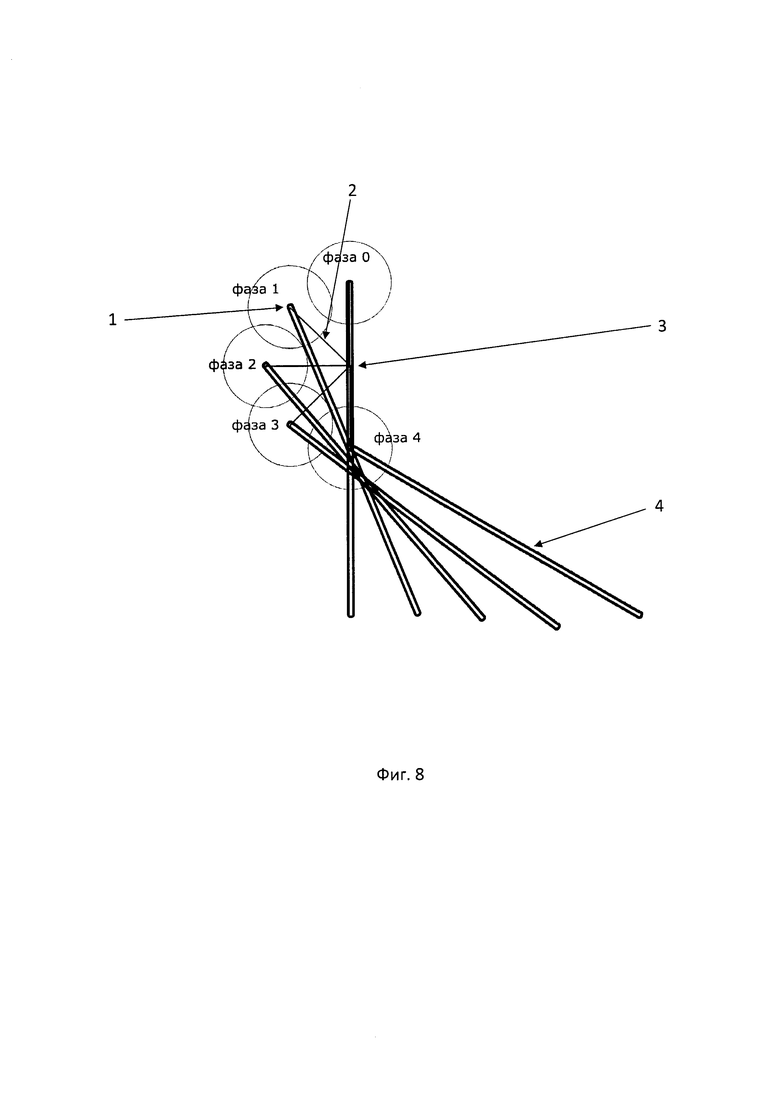
Способ компенсации колебаний реализуется следующим образом, одинаковом для всех вышеперечисленных вариантов устройства: выходной вал 1 (фиг. 8) на котором симметрично закреплены несколько опор 4 вращается на свободном конце кривошипа 2. Сам кривошип 2 приводится во вращение входным валом 3. При этом выходной вал 1 вращают в том же направлении и плоскости что и кривошип 2. Но выходной вал 1 вращают медленнее чем кривошип 2, в частности при количестве опор 4 равном трем за один полный оборот кривошипа 2 выходной вал 1 должен провернуться на 1/3 оборота, но с плавающей угловой скоростью. Угловую скорость выходного вала 1 изменяют в зависимости от текущего положения и угловой скорости кривошипа. Изменение угловой скорости производится таким образом, чтобы максимальная угловая скорость выходного вала 1 была в верхнем положении кривошипа 2, при котором одна из опор 4 находится в вертикальном положении. А минимальную угловую скорость выходного вала 1 получают в нижнем положении кривошипа 2, когда опора 4 касается поверхности под наименьшим углом. Изменение угловой скорости производится плавно.
Для наглядности поворот кривошипа 2 на фиг. 8 показан в виде 4-ех основных фаз вращения: 1-я фаза - поворот из верхнего вертикального положения на 45 градусов, 2-я фаза - поворот на следующие 45 градусов до горизонтального положения кривошипа 2. 3-я фаза - поворот из горизонтального положения на следующий 45 градусов вниз, и наконец 4-я фаза - поворот на следующие 45 градусов в нижнее вертикальное положение. Наибольшее снижение колебаний обоих типов (пространственного и скоростного) при использовании трех опор 4 наблюдается, если: в 1-й фазе выходной вал 1 повернется примерно на 22-23 градуса во 2-й фазе выходной вал 1 повернется на 17-18 градусов в 3-й фазе выходной вал 1 повернется примерно на 11-12 градусов и в 4-й фазе выходной вал 1 повернется примерно на 6,5-7,5 градуса. При движении кривошипа 2 из нижнего положения в верхнее поворот выходного вала 1 осуществляется аналогичным образом - в нижнем положении наименьший угол вращения, в верхнем - наибольший.
Данный способ и все вышеперечисленные варианты механизмов устройства компенсации колебаний позволяют исключить в предлагаемом устройстве кулачковые механизмы и пружины, уменьшить коэффициент трения и габариты устройства и существенно снизить колебания, как пространственные, так и скоростные.
Благодаря показанным решениям и оптимально подобранным параметрам - вертикальные колебания удается снизить до 5% от длины опор, а колебания линейной скорости опорных точек можно снизить до 6,5% от их средней скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ведущий мост транспортного средства, его варианты | 1982 |
|
SU1049275A1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
| БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА С ПЛАНЕТАРНЫМ МЕХАНИЗМОМ "a+h" | 2017 |
|
RU2677744C1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ САМОХОДНОЙ МАШИНЫ | 2005 |
|
RU2297355C2 |
| БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА С ПЛАНЕТАРНЫМ МЕХАНИЗМОМ "a+b" | 2017 |
|
RU2677813C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА С ПЛАНЕТАРНЫМ МЕХАНИЗМОМ С ВЫХОДОМ НА ЭПИЦИКЛИЧЕСКОЕ КОЛЕСО | 2016 |
|
RU2659368C2 |
| БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА С ПЛАНЕТАРНЫМ МЕХАНИЗМОМ С ВЫХОДОМ НА ВОДИЛО | 2016 |
|
RU2656941C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ДЛЯ ПРИВОДА КОЛЕС ИЛИ МОСТОВ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2520224C1 |
| Система централизованной синхронизации переключения передач | 2019 |
|
RU2719704C1 |
Группа изобретений относится к механизму преобразования вращательного движения в равномерное поступательное движение. Устройство компенсации колебаний для колесно-шагового движителя состоит из нескольких опор, симметрично закрепленных на выходном валу, закрепленном с возможностью поперечных движений, и включает в себя кривошип, приводимый в движение входным валом, а на свободном конце кривошипа закреплен выходной вал. Выходной вал вращают в том же направлении и плоскости, что и кривошип, при этом выходной вал вращают медленнее, чем кривошип. Угловую скорость вращения выходного вала изменяют в зависимости от текущей угловой скорости и положения кривошипа. Согласно представленным вариантам выполнения устройства компенсации колебаний угловую скорость выходного вала предлагается регулировать с помощью различных вариаторов или управляемых редукторов. Достигается уменьшение коэффициента трения и габаритов устройства и существенное снижение колебаний и возможность исключения из конструкции устройства кулачковых механизмов и пружин. 3 н. и 13 з.п. ф-лы, 8 ил.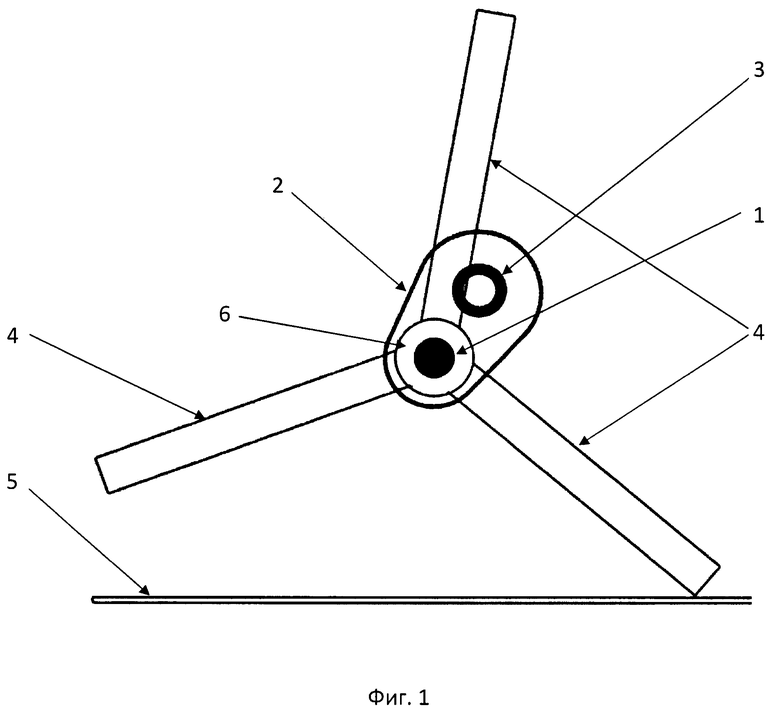
1. Способ компенсации колебаний колесно-шагового движителя, заключающийся в том, что выходной вал, на котором симметрично закреплены несколько опор, закрепляют на свободном конце кривошипа, вращаемого входным валом, при этом выходной вал вращают в том же направлении и плоскости, что и кривошип, но угловую скорость выходного вала изменяют в зависимости от положения и угловой скорости кривошипа.
2. Способ по п. 1, отличающийся тем, что за один полный оборот кривошипа выходной вал поворачивают на 1/n оборота, где n - это количество опор, закрепленных на выходном валу.
3. Способ по п. 1, отличающийся тем, что максимальную угловую скорость выходного вала развивают в верхнем положении кривошипа, при котором одна из опор, касающаяся поверхности, находится в вертикальном положении, а минимальную угловую скорость получают в нижнем положении кривошипа, когда две опоры одновременно касаются поверхности.
4. Устройство компенсации колебаний для колесно-шагового движителя, состоящего из нескольких опор, симметрично закрепленных на выходном валу, закрепленном с возможностью поперечных движений, включающее в себя кривошип, приводимый в движение входным валом, а на свободном конце кривошипа закреплен выходной вал, при этом выходной вал приводится во вращение через вариатор, меняющий угловую скорость выходного вала в зависимости от текущего положения кривошипа и его угловой скорости.
5. Устройство компенсации колебаний по п. 4, отличающееся тем, что включает в себя энкодер, определяющий положение кривошипа и его угловую скорость, а вариатором является сервопривод, включающий в себя электронный вариатор, который подключен к энкодеру.
6. Устройство компенсации колебаний по п. 4, отличающееся тем, что вариатор включает в себя управляющий шатун, вращаемый кривошипом, при этом неподвижная ось шатуна закреплена на заранее определенном расстоянии от входного вала.
7. Устройство компенсации колебаний по п. 4, отличающееся тем, что вариатор включает в себя планетарный механизм, состоящий из неподвижной солнечной шестерни, закрепленной на корпусе устройства компенсации колебаний, водила и по меньшей мере одного сателлита, закрепленного на водиле, при этом водилом является кривошип.
8. Устройство компенсации колебаний для колесно-шагового движителя, состоящего из нескольких опор, симметрично закрепленных на выходном валу, закрепленном с возможностью поперечных движений, включающее в себя:
планетарный механизм, состоящий из неподвижной солнечной шестерни, закрепленной на корпусе устройства компенсации колебаний соосно с входным валом, сателлита, входящего в зацепление с неподвижной солнечной шестерной такого же размера, закрепленного на кривошипе, являющемся водилом,
редуктор, закрепленный на сателлите, при этом выход редуктора соединен с выходным валом,
управляющий шатун, один конец которого взаимодействует с редуктором, а второй конец ограничивается осью, неподвижной относительно корпуса устройства компенсации колебаний.
9. Устройство компенсации колебаний по п. 8, отличающееся тем, что второй конец управляющего шатуна свободно закреплен на оси входного вала, при этом управляющий шатун выполнен с изменяемой длиной.
10. Устройство компенсации колебаний по п. 8, отличающееся тем, что редуктор выполнен в виде планетарного редуктора, конец управляющего шатуна зафиксирован с его водилом, одна центральная шестерня зафиксирована с сателлитом планетарного механизма, а вторая центральная шестерня соединена с выходным валом.
11. Устройство компенсации колебаний по п. 10, отличающееся тем, что при количестве опор, равном трем, отношение центральных шестерен планетарного редуктора составляет 3 к 2.
12. Устройство компенсации колебаний по п. 8, отличающееся тем, что редуктор состоит из
ведомой шестерни, расположенной соосно с сателлитом и соединенной с выходным валом,
ведущей эпициклической шестерни, входящей в зацепление с ведомой шестерней, при этом центр ведущей эпициклической шестерни сдвинут по отношению к центру ведомой шестерни, конец управляющего шатуна взаимодействует с данной эпициклической шестерней, а ось данной эпициклической шестерни эксцентрично зафиксирована на сателлите.
13. Устройство компенсации колебаний по п. 12, отличающееся тем, что при количестве опор, равном трем, отношение ведущей эпициклической шестерни к ведомой шестерне составляет 5 к 3.
14. Устройство компенсации колебаний по п. 8, отличающееся тем, что редуктор состоит из
ведомой шестерни, расположенной соосно с сателлитом и соединенной с выходным валом,
ведущей шестерни, находящейся относительно ведомой шестерней в параллельной плоскости, центр ведущей шестерни сдвинут по отношению к центру ведомой шестерни, при этом конец управляющего шатуна зафиксирован с данной ведущей шестерней, а ось данной ведущей шестерни эксцентрично зафиксирована на сателлите,
по меньшей мере одной промежуточной шестерни, находящейся в одновременном зацеплении с ведомой и ведущей шестернями, ось промежуточной шестерни зафиксирована на сателлите.
15. Устройство компенсации колебаний по п. 14, отличающееся тем, что при количестве опор, равном трем, отношение ведущей шестерни к ведомой шестерне составляет 5 к 3.
16. Устройство компенсации колебаний по п. 8, отличающееся тем, что планетарный механизм состоит из неподвижной солнечной шестерни эллиптической формы, сателлита, входящего в зацепление с неподвижной солнечной шестерной такого же размера и такой же эллиптической формы, при этом обе шестерни соединены двумя шатунами фиксированной длины, закрепленными на данных шестернях эксцентрично, один из этих шатунов является одновременно кривошипом и водилом, а второй шатун является управляющим шатуном.
| ШАССИ ДЛЯ ПЕРЕДВИЖЕНИЯ ПО РАЗЛИЧНЫМ ОПОРНЫМ ПОВЕРХНОСТЯМ С КОЛЕСНО-ШАГОВЫМИ ДВИЖИТЕЛЯМИ | 2015 |
|
RU2628285C2 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 1992 |
|
RU2038248C1 |
| Движитель транспортного средства Анопченко В.Г. | 1990 |
|
SU1790936A1 |
| CN 204279688 U, 22.04.2015 | |||
| CN 103192897 A, 10.07.2013. | |||

