и формирователь приведенного тока ротора связаны с датчиками фазных напряжений и токов статора. Формирователь соединен также с питающей сетью. Второй вход формирователя подключен к датчикам фазных токов ротора. Выходы формирователя соединены также с входами формирователя сигнала скорости, выход которого подключен к регулятору скорости.
В известном устройстве информация о скорости вращения двигателя получается косвенным образом при обработке измеряемых параметров режима.
При использовании известного устройства для вьвделения сигналов частоты аращения ротора необходима фильтрация результирующего сигнала от высщих гармонических, возникающих при работе тиристорного преобразователя частоты, причем частота помех низкая, а амплитуда полезного сигнала зачастую соизмерима с амплитудой высших гармонических. При установке фильтров в каналы регулирования вносится запаздывание, что отрицательно влияет на точность и качество управления.
Целью изобретения является повышение точности и качества управления электроприводом.
Это достигается тем, что в известное устройство для частотного управления электроприводом переменного тока, выполненном на базе асинхронной машины с фазным ротором, статорная обмотка которой подключена непосредственно к питающей сети, а роторная обмотка подключена к питающей сети через преобразователь частоты, содержащее датчики фазных токов и нанряжений статора, датчик фазных токов ротора, блок задания скорости, выход которого соединен с входом задающего генератора, блок задания реактивной мощности, выход которого подключен к входу регулятора реактивной мощности, выход которого подсоединен к первому входу прямого преобразования координат, вторые входы которого соединены с выходами задающего генератора, блок управления, выход которого подключен к преобразователю частоты, дополнительно введены блок формирования проекций ЭДС статора (тока ротора), блок формирования гармонических сигналов на частоте скольжения, датчик проекцнн тока ротора, блок формирования сигнала, пропорционального квадрату амплитуды тока ротора, блок формирования сигнала, пропорционального тригонометрической функции угла в положения вектора потока возб ждения, блок выделения трнгонометрической функции указанного угла, блок формирования составляющей сигнала ориентации потока возбуждения машины относительно синхронной оси, блок преобразования числа фаз, два блока формирования составляющих нотокосцепления ротора, два блока произведения и два сумматора, при этом выходы датчиков фазных токов и напряжений статора соединены с входами блока формирования проекций ЭДС статора (тока ротора), выходы которого подключены к входам блока формирования гармонических сигналов на частоте скольжения и к входам блока формирования квадрата амплитуды тока ротора, выходы блока формирования гармонических сигналов на частоте скольжения соединены с первыми входами блока формирования сигнала, пропорционального тригонометрической функции угла 9 положения вектора потока возбуждения, вторые входы которого соединены с выходами задающего генератора, а выход совместно с выходом блока формирования сигнала, пропорционального квадрату амплитуды тока ротора, подсоединен к входам блока выделения тригонометрической функции угла в, выход которого соединен с входом блока формирования составляющей сигнала ориентации потока возбуждения машины относительно синхронной оси, выход которого подключен к третьему входу блока прямого преобразования координат, выходы которого через сумматоры подключены к входам блока управления, выходы которого соединены с входами блока преобразования числа фаз, выходы которого подключены к первым входам блоков формирования составляющих потокосцепления ротора, вторые входы которых соединены с выходами датчика фазных токов ротора, подключенными также к входам блока формирования гармонических сигналов на частоте скольл ения, причем выходы блоков формирования составляющих потокосцепления ротора вместе с выходами блока задания скорости соединены с входами блоков пронзведения, выходы которых соединены с вторыми входамн сумматоров, а вход датчика проекций тока ротора соединен с выходом датчика фазных токов ротора.
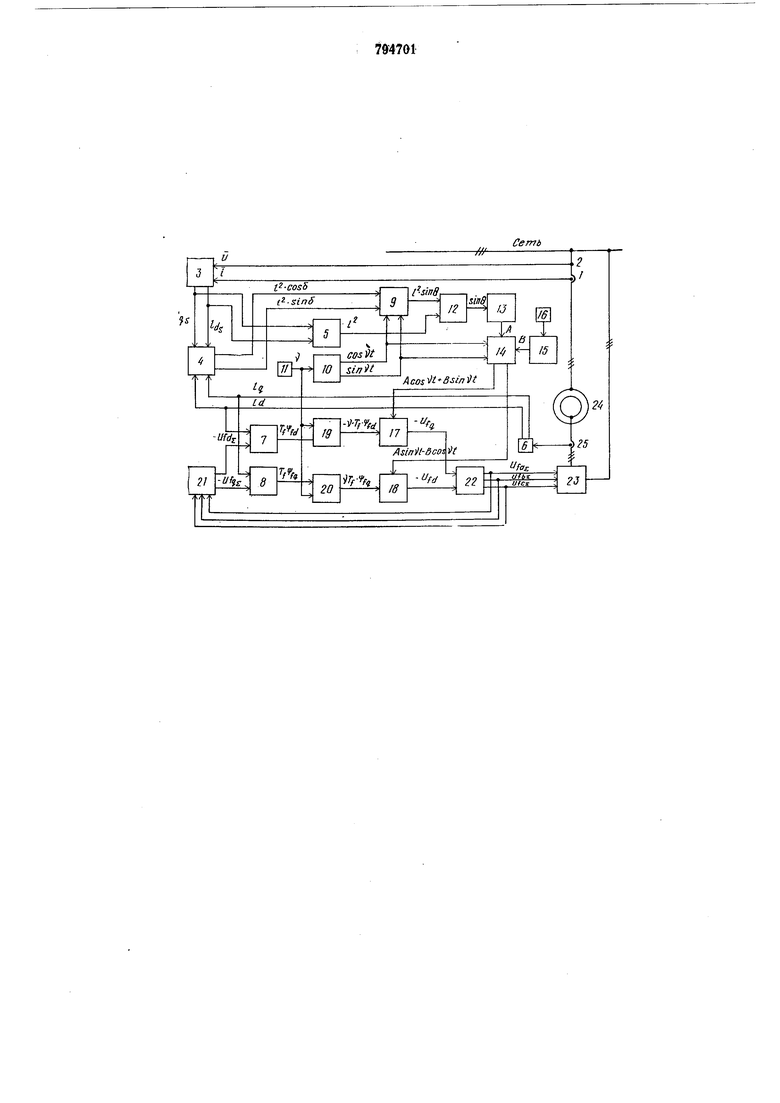
На чертеже представлена блок-схема предложенного устройства.
Устройство содержит датчики 1 и 2 фазных токов и нанряжений статора, выходы которых подключены к входам блока 3 формирования проекций ЭДС статора. Выходы блока 3 соедннены с первыми входами блока 4 формирования гармонических сигналов на частоте скольжения (преобразователя координат) и с входами блока 5 формирования сигнала, пропорционального квадрату амплитуды тока ротора. Вторые входы блока 4 соедипены с выходами датчика 6 проекций тока ротора, соединенными также с первыми входами блоков 7 и 8 формирования составляющих потокосцепления ротора, представляющими собой интеграторы. Выходы блока 4 соединены с первыми входами блока 9 формирования сигнала, пропорционального тригонометрической функции угла 0 положения вектора
потока. К вторым входам блока 9 подсоединены выходы задающего генератора 10, к входу которого подключен выход блока 11 задания скорости, а выход блока 9 подключен к первому входу блока 12 выделения тригонометрической функции угла в, при этом второй вход блока 9 соединен с выходом блока 5 формирования сигнала, пропорционал,ьного квадрату амплитуды тока ротора. Выход блока 12 через блок 13, который формирует составляющую сигнала ориентации потока возбуждения машины относительно синхронной оси в соответствии с зависимостью
A aisin9 + a2 f sine-dt + a.r S« , (1)
соединен с одним из входов блока 14 прямого преобразования координат, другой вход которого соединен с выходом регулятора 15 реактивной мощности, вход которого соединен с выходом блока 16 задания реактивной мощности, а к третьим входам блока 14 подсоединены выходы задающего генератора 10. Выходы блока 14 соединены с первыми входами сумматоров 17 и 18, осуществляющих суммирование составляющих управляющего сигнала с составляющими сигнала компенсации, при этом к их вторым входам подключены выходы блоков 19 и 20 произведения, входы которых соединены с выходом блока И задания скорости и выходами блоков-интеграторов 7 и 8. Вторые входы блоков 7 и 8 соединены с выходами блока 21 преобразования фаз (из трехфазной системы в двухфазную), входы которых подсоединены к входам блока 22 управления, входы которого соединены с выходами сумматоров 17 и 18. Выходы блока 22 подключены также к входам преобразователя частоты 23, через который осуществляется питание цепи обмотки ротора машины 24, в которую включен датчик 25 фазных токов ротора, соединенный с датчиком 6 проекции тока ротора.
Устройство работает следующим образом.
После выделения из контуров статора с помощью датчиков фазных токов 1 и напряжений 2 проекций ЭДС на синхронно вращающиеся оси ds, Qs , осуществляемого в блоке 3, требуется сформировать гармонические сигналы sin6 и cos6 на частоте скольжения «s сос- oj .
Для этого соответствующие проекции ЭДС статора с выхода блока 3 поступают на вход блока 4 и совместно с проекциями изображающего вектора тока ротора на оси dq ротора, выделенными с помощью датчика 6 проекций тока ротора, обрабатываются в блоке 4 в соответствии с зависимостью
Iqs-lqR+lds-ldR l-COS6(2)
Id -IqR-Iqs-ldR- Isin6.(3)
Задачей дальнейшего преобразования, осуществляемого в блоке 9, является выделение сигнала, пропорционального тригонометрической функции угла нространс венного положения вектора потока возбуждения машины относительно выбранной синхронной оси (6 6 - vt). Выходным сигналом блока 9 является сигнал , поступающий на вход блока 12.
После деления в блоке 12 на вьщеленный в блоке 5 квадрат амплитуды тока ротора е, полученный сигнал, пропорциональный sinO, подается на вход блока 13, на выходе которого формируется сигнал, пропорциональный А.
Для перевода осевых составляющих сигнала управления на частоту задающего генератора в блоке 14 производятся операции умножения амплитуд осевых составляющих
управляющего сигнала на гармонические сигналы cosvt и sinvt. Так, например, для одного канала
(«1 sine + aafsinO dt-fas SQ)cosvt4+ ро sinvt(4)
1
Ро - ( (id-ids.)
(5)
dt.
и J
30 При этом сигнал, соответствующий ро, получают на выходе регулятора 15, на вход которого подается выходной сигнал блока 16.
Полученные в соответствии с формулой
35 (4) составляющие сигнала управления складываются с осевыми составляющими сигнала компенсации -vTf ipfa и vT/- T)3fq соответственно в сумматор 17 и 18.
Составляющие сигнала компенсации об4Д разуются после умножения в блоках 19 и 20 сигналов, пропорциональных составляющим потокосцепления ротора Tf j)fq и Т{ i|;f(i на частоту v задающего генератора. Указанные сигналы получаются интегрированием в блоках 7 и 8 разностных сигналов, образованных из осевых составляющих напряжений регулятора и осевых составляющих тока ротора:
50TrtD,,(U,,,-l,,)dt(6)
(приведено для одной осевой составляющей) .
Сигналы, пропорциональные осевым составляющим напряжения на кольцах рото paUfq j nUjq,,.,получаются после линейной обработки сигналов с выходов оконечных усилителей блока 22 регулирования из системы трех сигналов, имеющих взаимный
gQ временной сдвиг в 120 эл. град. Uj,,,;,Ufb. LJf,,,поступающих на вход преобразователя частоты 23 с помощью блока 21 (преобразователь числа фаз 3/2).
Таким образом, в данном устройстве
65 формирование сигнала управления производится в синхронной системе координат на постоянном токе, что позволяет осуществить безынерционное качественное управление электроприводом на базе асинхронной машины с фазным ротором, снизить уровень помех, повысить точность регулирования.
Формула изобретения
Устройство для частотного управления электроприводом переменного тока, выполненном на базе асинхронной машины с фазным ротором, статорная обмотка которой подключена непосредственно к питаюш,ей сети, а роторная обмотка подключена к питаюшей сети через преобразователь частоты, содержащее датчики фазных токов и напряжений статора, датчик фазных токов ротора, блок задания скорости, выход которого соединен с входом задающего генератора, блок задания реактивной мощности, выход которого подключен к входу регулятора реактивной мощности, выход которого подсоединен к первому входу блока прямого преобразования координат, вторые входы которого соединены с выходами задающего генератора, блок управления, выход которого подключен к преобразователю частоты, отличающееся тем, что, с целью повышения точности и качества управления, в устройство дополнительно введены блок формирования проекций ЭДС статора, блок формирования гармонических сигналов на частоте скольл ения, датчик проекций тока ротора, блок формирования сигнала, пропорционального квадрату амплитуды тока ротора, блок формирования сигнала, пропорционального тригонометрической функции угла в положения вектора потока возбуждения, блок выделения тригонометрической функции указанного угла, блок формирования составляющей сигнала ориентации потока возбуждения машины относительно синхронной оси, преобразователь числа фаз, два блока формирования составляющих потокосцеплений, два блока произведения и два сумматора, причем выходы датчиков фазных токов и напряжений статора соединены с входами блока формирования проекций ЭДС статора, выходы которого подключены к входам блока формирования гармонических сигналов на частоте скольжения и к входам блока формирования сигнала, пропорционального квадрату амплитуды тока ротора, выходы блока формирования гармонических сигналов на частоте скольжения соединены с первыми входами блока
формирования сигнала, пропорционального тригонометрической функции угла © положения вектора потока возбуждения, вторые входы которого соединены с выходами задающего генератора, а выход этого блока
и выход блока формирования сигнала, пропорционального квадрату амплитуды тока ротора, подсоединены к входам блока выделения тригонометрической функции угла в положения вектора потока возбуждения,
выход которого соединен с входом блока формирования составляющей сигнала ориентации потока возбуждения машины относительно синхронной оси, выход которого подключен к третьему входу блока прямого преобразования координат, выходы которого через сумматоры подключены к входам блока управления, выходы которого соединены с входами преобразователя числа фаз, выходы которого
подключены к первым входам блоков формирования составляющих потокосцепления ротора, вторые входы которых соединены с выходами датчика проекций тока ротора, подключенными к входам блока
формирования гармонических сигналов на частоте скольжения, причем выходы блоков формирования составляющих потокосцепления ротора и выходы блока задания скорости соединены с входами блоков произведения, выходы которых соединены с вторыми входами сумматоров, а вход датчика проекций тока ротора соединен с выходом датчика фазных токов ротора.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 614511, кл. Н 02 Р 7/42, 1976.
2.Авторское свидетельство СССР о заявке 2528732/07, кл. Н 02 Р 7/42, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1979 |
|
SU828356A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
| Электропривод с синхронным двигателем | 1975 |
|
SU809460A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Электропривод с синхронным двигателем | 1976 |
|
SU615583A2 |