Г
(Л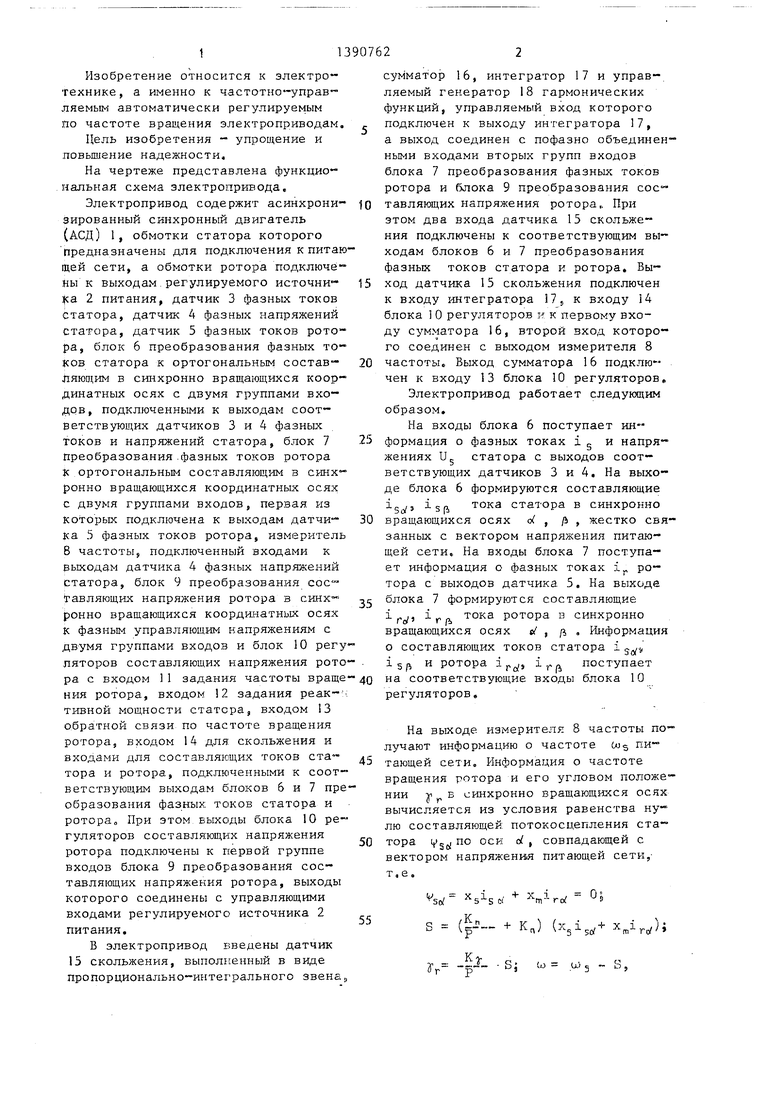

| название | год | авторы | номер документа |
|---|---|---|---|
| Регулируемый электропривод с асинхронизированным синхронным двигателем | 1972 |
|
SU490247A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Электропривод с регулированием активной и реактивной энергии от сети ограниченной мощности | 1978 |
|
SU884065A2 |
| Электропривод с асинхронным двигателем с фазным ротором | 1982 |
|
SU1083320A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| Система электроснабжения узла нагрузки | 1981 |
|
SU1103324A1 |
| Электропривод | 1981 |
|
SU1083319A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
Изобретение относится к электро технике. Целью изобретения является упрощение и повьппение надежности. Это достигается тем, что в электропривод введены датчик 15 скольжения, сумматор 16, интегратор 17 и управляемый генератор 18 гармонических функций. В результате в электроприводе обеспечивается получение инфорг мации о частоте вращения и угловом положении ротора асинхронизированно- го синхронного двигателя 1 без установки на его вал электромеханических датчиков. 1 ил.
со со о
О5 ND
Изобретение относится к электротехнике, а именно к частотно-управляемым автоматически регулируемым по частоте вращения электроприводам.
Цель изобретения - упрощение и повышение надежности.
На чертеже представлена функцио - .нальная схема электропривода.
Электропривод содержит асинхрони- зированный синхронный двигатель (АСД) 1, обмотки статора которого предназначены для подключения к питающей сети, а обмотки ротора подключены к выходам.регулируемого источни- ifia 2 питания, датчик 3 фазных токов статора, датчик 4 фазных напряжений статора, датчик 5 фазных токов ротора, блок 6 преобразования фазных токов статора к ортогональным составляющим в синхронно вращающихся координатных осях с двумя группами входов, подключенными к выходам соответствующих датчиков 3 и 4 фазньк токов и напряжений статора, блок 7 Преобразования-фазных токов ротора К ортогональным составляющим в синхронно вращающихся координатных осях с двумя группами входов, первая из Которых подключена к выходам датчика 5 фазных токов ротора, измеритель 8 частоты, подключенный входами к рыходам датчика 4 фазных напряжений статора, блок 9 преобразования сос гавляющих напряжения ротора в синх- - ровно вращающихся координатных осях К фазным управляющим напряжениям с двумя группами входов и блок 10 регуляторов составляющих напряжения ротора с входом 11 задания частоты вращения ротора, входом 2 задания реак- тивной мощности статора, входом 13 обратной связи по частоте вращения ротора, входом 14 для скольжения и входами для составляющих токов статора и ротора, подключенными к соответствующим выходам блоков 6 и 7 преобразования фазных токов статора и ротора При этом выходы блока 10 регуляторов составляющих напряжения ротора подключены к первой группе входов блока 9 преобразования составляющих напряжения ротора, выходы которого соединены с управляющими входами регулируемого источника 2 питания,
Б электропривод введены датчик 15 скольжения, выполненный в виде пропорционально-интегрального звена
сумматор 16, интегратор 17 и управляемый генератор 18 гармонических функций, управляемый вход которого
подключен к выходу интегратора 17, а выход соединен с пофазно объединенными входами вторых групп входов блока 7 преобразования фазных токов ротора и блока 9 преобразования сое
тавлякяцих напряжения ротора,, При этом два входа датчика 15 скольжения подключены к соответствующим выходам блоков 6 и 7 преобразования фазных токов статора и ротора. Вы-
ход датчика 15 скольжения подключен к входу интегратора 17, к входу 14 блока 1 О регуляторов к к первому входу сумматора 16, второй вход которого соединен с выходом измерителя 8
частоты Выход сумматора 16 подклю- чен к входу 13 блока 10 регуляторов. Электропривод работает следующим образом.
На входы блока 6 поступает ин
формация о фазных токах i и напряжениях Ug статора с выходов соответствующих датчиков 3 и 4. На выходе блока 6 формируются составляющие ISP, тока статора в синхронно
вращающихся осях о( , р , жестко связанных с вектором напряжения питающей сети. На входы блока 7 поступает информация о фазных токах 1„ ротора с выходов датчика 5, На выходе
блока 7 формируются составляющие i , i „ тока ротора в синхронно вращающихся осях « , , Информация о составляющих токов статора i 5
ISP и ротора 1р,
1
г fi
поступает
на соответствующие входы блока 10 регуляторов.
На выходе измерителя 8 частоты получают информацию о частоте tog питающей сети. Информация о частоте
вращения ротора и его угловом положении J1 Б синхронно вращающихся осях вычисляется из условия равенства нулю составляющей потокосцепления ста
тора по оси о , совпадающей с вектором напряжения питающей сети,т.е.
55
О
S (Ь- + Kj (Xgi,+ ,/;i
,.- -1 - В.
Со Ы 5 Б ,
где К, К, J- коэффициенты;
Хд, X реактивные сопротивления;Р - число пар полюсов,
Сигнал ff используется в качестве управляющего для генератора 18 гармонических функций siny., cosj-, поступающих на опорные -входы блоков 7 и 9 преобразований. На входы 1 и 12 блока 10 регуляторов поступают сигналы задания ui, QSQ. частоты вращения ротора и реактивной мощности статора соответственно. На вход 13 поступает информация о текущей частоте вращения ротора с выхода сумматора 16.
При отсутствии нагрузки на валу АСД фактическое значение скорости ш равно заданному ыо за счет работы блока 10 регуляторов. Сигнал на его выходе обеспечивает равенство нулю составляющей тока статора АСД по , оси о , При этом следящая система, в которую входят блоки 15 и 16, обеспечивает вычисление скорости АСД и поддерживание ее на уровне задания,.
При наличии нагрузки на валу АСД происходит изменение составляющей тока статора по оси о1 и составляющей тока ротора по оси о , в результате сравнения этих составляющих токов в блоке 15 и после их нн- - тегрирования на выходе сумматора 16 формируется сигнал, соответствующий скорости АСД. Составляющие и fn. напряжения ротора с выходов блока 10 регуляторов поступают в блок 9 преобразования, где формируются фазные управляющие напряжения , для регулируемого источника 2 питания.
Таким образом, в предложенном электроприводе требуемая информация о Частоте вращения и угловом положении ротора относительно синхро1нно вращающихся координатных осей получается без установки на валу электромеханических датчиков, что упрощает конструкцию и повьшает надежность работы электропривода.
Формула изобретения
Электропривод, содержащий асинх- ронизированный синхронный двигатель обмотки статора которого предназначены для подключения к питаншей сети, а обмотки ротора подключены к
выходам регулируемого источника питания, датчики фазных токов и напряже- .НИИ статора, датчик фазных токов ро- с тора, блок преобразования фазных токов статора к ортогональным составляющим в синхронно вращающихся коор динатных осях с двумя группами вхо дов, подключенными к выходам соответO ствующих датчиков фазных токов и напряжений статора, блок преобразования фазных токов ротора к ортогональным составлякхцим в синхронно вращающихся координатных осях с
5 двумя группами входов, первая из которых подключена к выходам соответствующих датчиков фазных токов ротора,, измеритель частоты, подключенный входами к выходам датчика фазных.
0 напряжений статора, блок преобразования составляющих напряжения ротора в синхронно вращающихся координатных осях к фазным управляюп им напряжениям с двумя группами входов и 5 блок регуляторов составляющих напряжения ротора с входами задания частоты вращения ротора и реактивной мощности статора, с входом обратной связи по частоте вращения ротора,
0 входом для скольжения и входами для составляющих токов статора и ротора, подключенными к соответствующим выходам указанных блоков преобразования фазных токов статора и ро-
5
тора, при этом выходы блока
регуляторов составлякщих напряжения ротора подключены к первой группе входов указанного блока преобразования составляющих напряже-
Q ния ротора, выходы которого соединены с управляющими входами регулируемого источника питания, отличающийся тем, что, с целью упрощения и повышения надежности,
5 введены датчик скольжения, выполненный в виде пропорционально-интегрального звена, сумматор, интегратор и управляемый генератор гармонических функций, управляемый вход которого - подключен к выходу интегратора, а выход соединен с пофазно объединенными входами вторых групп входов указанных блока преобразования фазных токов, ротора и блока преобразования составляющих напряжения ротора, при этом два входа датчика скольжения подключены к соответствующим вы- ходам указанных блоков преобразования фазных токов статора и ротора,
513907626
В1)1ход датчика скольжения подключен рого соединен с выходом измерителя к входу интегратора, к соответствую- частоты, а выход Сумматора подключен щему входу блока регуляторов состав- к входу обратной связи по частоте
ляющих напряжения ротора и.к первому вращения ротора блока регуляторов входу сумматора, второй вход кото- составлякяцих напряжения ротора.
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Регулируемый электропривод с асинхронизированным синхронным двигателем | 1972 |
|
SU490247A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
