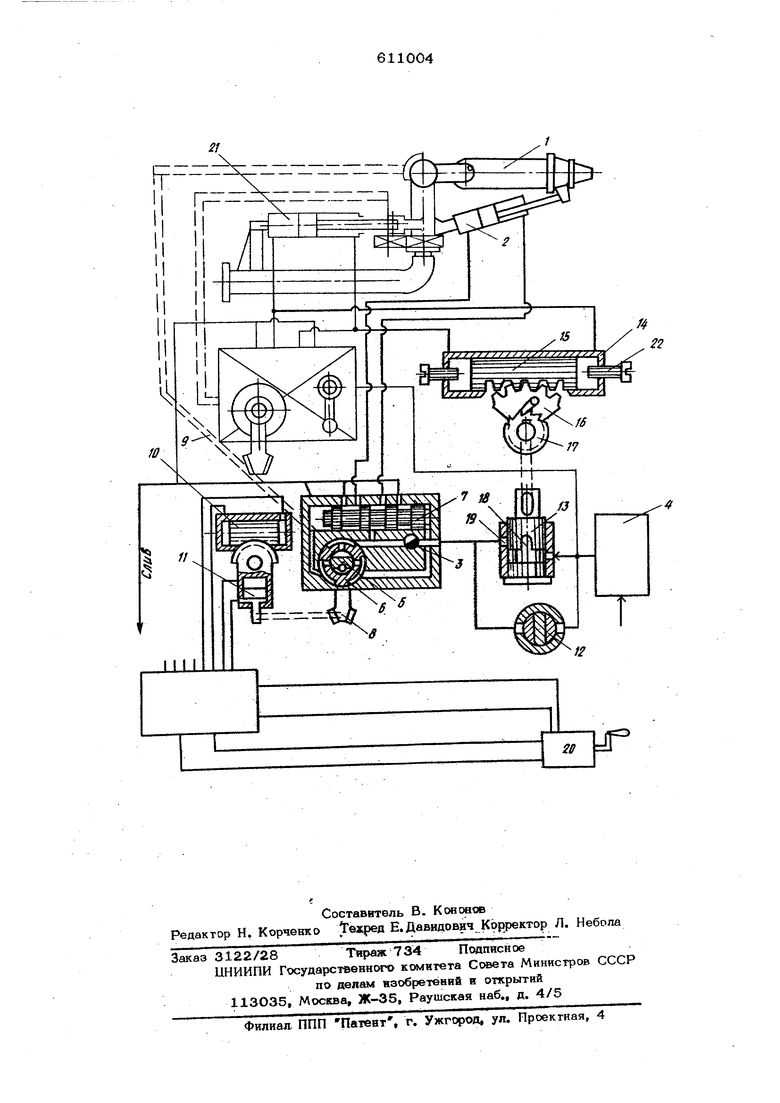
(54) УСТГЮЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ гаДРОМОНИТОРОМ 13 имеет канал 18, соединяемый с отверстием 19. Программа работы гидромонитора Задается и в процессе работы корректирует ся оператором с пупьта 20 дистанционного управления. Полости гидроцилиндра 14 соединены параллельно с гидроцилиндром 21. Для регулирования хода поршня 15 гидро цилиндр 14 снабжен стопорными винтами 22 yctpoftcTBO для дистанционного управления гидромонитором работает следующим образом. Напорное масло с пульта дистанционного управления поступает в один из двух исполнительных цилиндров механизма подъема ствола, которые собраны по обычной; схеме реверсирования движения поршня гидроцилиндра. Кран 12 переводится влположение Закрыто. Напорная жидкость может поступать только через кран 13 с механическим привсугбм. Вращение пробки крана осуществляется поршнем (peAKt) 15, чере зубчатый сектор 16 и храповой механизм 17, Полости гидротилиндра 14 связаны паралдюльно с гидроцилиндром ; 21, .который осуществляет беспрерывное качание ствола в горизонтальней плоскости. Следовательно норшень (рейка) 15 совершает такие же движения, как поршень гидроцилиндра 21. При этом храповой механизм 17 вращает пробку крана 13. Пробка крана имеет канал 18, который постоянно соединен с напором. Через определенное количество качаний ствола-в горизонтальной плоекостик нал 18 соединяется с отэерстием 19 и устройство включает гидравлический привод 2 для смещения ствола на заданную величину в вертикальной плоскости, после чего механизм вновь отключается к т.д. Величина смещения задается дросселем 3; число качаний ствола, после которого не.обходимо смещение, задается упорными винтами 22, изменяющими величину хода порщня 15. Следовательно, канал 18 совпадает с отверстием ,19 через заданное количество качаний ствола в горизонтальной плоскости. Формула изобретения Устройство для дистанционного управления гидромонитором, включающее ствол гидромонитора с гидравлическим приводом и дросселем, масляный насос, механизм поворота и подъема ствола, о т л и ч а ющ е е с я тем, что, с целью обеспечения работы ствола гидромонитора в ступенчатом и зигзагообразном режиме, а также периодического включения и выключения, на напорной магистрали установлены параллельно два крана, один из которых выполнен с ручным приводом, а другой - с приводом от гндроцилиндра, имеющего регулируемый ход порщня, через храповсА механизм. Источники информации, принятые во внимание при экспертизе: ,1. Юфин; А. П. Гидромеханизация. М., недра 1965, с. 59. 2. Авторское свидетельство № 137482, кл. Е 21 С 45/00, 1960.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОМОНИТОРНАЯ УСТАНОВКА С ТРУБОПРОВОДОМ ПЕРЕМЕННОЙ ДЛИНЫ | 2010 |
|
RU2459075C1 |
| Устройство для управления реверсивным исполнительным механизмом | 1982 |
|
SU1084444A1 |
| Устройство для автоматического управления стволом гидромонитора | 1980 |
|
SU883452A1 |
| Гидромониторная установка | 1956 |
|
SU132161A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРОМОНИТОРОМ | 1965 |
|
SU176222A1 |
| Гидромониторная установка | 1948 |
|
SU80226A1 |
| УСТРОЙСТВО для КОНТРОЛЯ ПОЛОЖЕНИЯ СТВОЛА ГИДРОМОНИТОРА | 1973 |
|
SU404943A1 |
| МАЛОГАБАРИТНЫЙ ГИДРОМОНИТОР | 2005 |
|
RU2306419C2 |
| Передвижной гидромонитор | 1939 |
|
SU61432A1 |
| Устройство для управления колонковым гидромонитором | 1972 |
|
SU618552A1 |