Гидромониторпредлагаемого
устройства предназначается для подготовительных и очистных работ как на крутопадающих, так и на пологопадающих пластах средней « большой мощности. Благодаря применению в нем телескопического устройства гидромонитор можно передвигать вслед за забоем, что обеспечивает неизменность его производительности и сохраняет оптимальным расстояние от насадки до груди забоя. Вследствие этого производительность гидромонитора при прохождении щтреков значительно выще, чем при неподвижном мониторе. Такое устройство при очистных работах в лаве позволяет заменить веерообразную выемку угля выемкой параллельными слоями, что опять-таки увеличивает производительность и, кроме того, повыщает безопасность работ.
Управление гидромониторами осуществляется стандартными гидроприводами, что дает компактную конструкцию и позволяет перевести мониторы Hia дистанционное управление.
Все эти преимущества достигаются тем, что у передвижного гидромонитора, имеющего гибкое Соединение ствола с трубопроводом и телескопические трубы, применены три гидропривода статического действия, которые приводятся в действие от напорной воды, подаваемой в гидромонитор. Оди:н из трех гидроприводов установлен на передвижной раме и Т1ри помощи соответствующей передачи служит для передвижения этого устройства; второй гидропривод установлен н-а вращающейся раме и предназначен для вращения ствола в горизонтальной плоскости, а третий гидропривод служит для вращения этого ствола в вертикальной плоскости.
Для дистанционного же управления вместо статических гидроприводов применяются гидроприводы динамического действия, у которых сопла, через которые в гидропривод Подается жидкость, имеют игольчатые клапаны, управляемые на расстоянии при помощи электромагнитных реле.
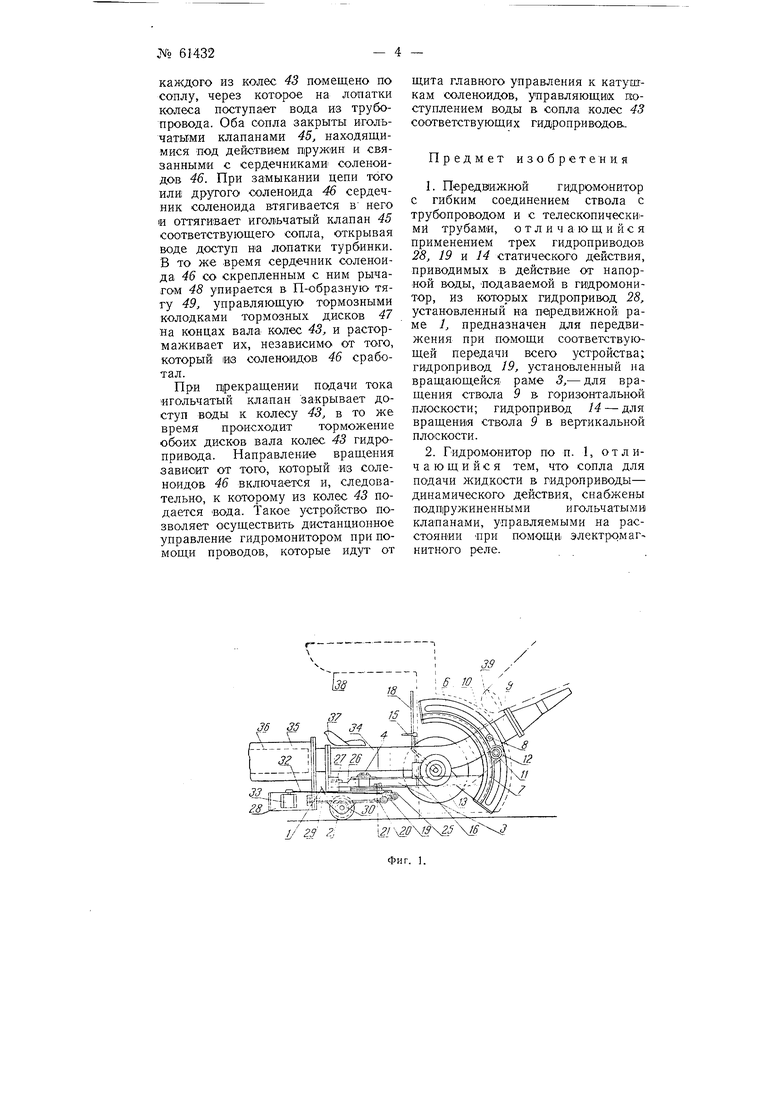
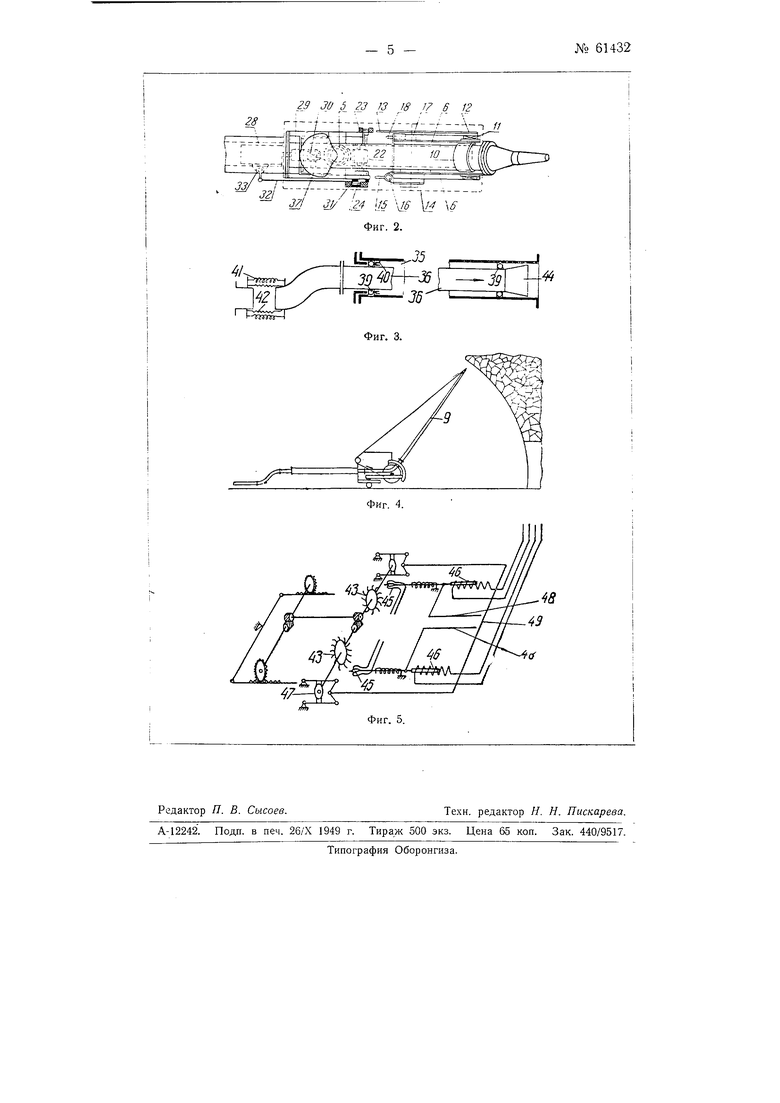
На фиг. 1 показан гидромони:тор с тремя гидроприводами сбоку; на фиг. 2 - вид в плане; на фиг. 3 показано телескопическое соединение гидромонитора с напорным трубопроводом; на фиг. 4 показана схема применения гидромонитора
для очистных .работ и на фиг. 5 - схема одного из гидроприводов динамического действия с управлением на расстоянии.
На сварной раме 1 (фиг. 1 и 2) И8 швеллерного железа, установленной на колесах 2 со шпорами или же на салазках, йомеш ается подвижная рама 3, тоже сварная, из швеллерного железа. Подвижная рама 3 может товорачиваться на некоторый угол вокруг оси 4. Для уменьшения сил трения при вращении рамы 3 установлены ynopiные шарикоподшипники 5. На раме 5 в передней ее части вертикально расположены два круговых сегмента 6. Эти сегменты имеют зубчатые круговые рейки 7 и пазы, в которых скользят направляющие ролики 8 обоймы 10 ствола 9 гидромонитора.
При изменени,и угла наклона ствола 9 в вертикальной плоскости, последний может одновременно перемещаться в обойме 10 в осевом Направл1ениИ.
Обойма 10 ствола 9 опирается на поперечную ось с шестернями 11, неподвижно ук|репленньгаи па ее концах. Ось с шестернями 11 вращается в подшипниках, которые закреплены на обойме 10. Шестерни образуют зубчатое зацепление с круговыми рейками 7. С одной стороны ствола 9 гидромонитора, на оси за шестерней 11, жестко насажена звездочка 12, которая цепью Галля связана со звездочкой 13, сидящей неподвижно на валу гидропривода 14.
Гидропривод 14 для вращательного движения ствола 5 гидрОМОнитора выполнен по -прийципу обратного действия насоса-альвейера. Для луска его в ход рукояткой 15 поворачивают золотник 16 и вода из напорного трубопровода поступает через гибкий шланг в золотник 16 и направляется в тот или иной отсек гидропривода 14 От гидропривода 14 вращение через звездочки /5 и 12 передается шестерням 11, которые перемещаются по зубчатым рейкам 7, увлекая за собой обойму 10 ствола 9. Угол поворота ствола 9 гидромонитора в
вертикальной плоскости составляет около 115°.
В случае неисправности гидропривода 14 перемещение ствола гидромонитора в вертикальной плоскости может Осуществляться храповым механизмом 17 двухстороннего действия, который насажен на вал гидропривода 14 и приводится в действие от рукоятки 18. Когда гидропривод работает, то храповым механизмом не пользуются.
Ствол 9 гидромонитора может поворачиваться в горизонтальной ПЛОСКОСТИ на 30° посредством поворота рамы 5 вокруг оси 4 при помощи второго гидропривода 19, выполненного в форме гидравлического цилиндра, на щтоке которого закреплена зубчатая рейка 20, находящаяся в зацеплении с зубчатым сектором 21 подвижной рамы 3. Гидропривод 19 управляется золотником 22 от «ожной педали 23.
При неисправности гидропривода 19 noBOipoT рамы 3 со стволом 9 осуществляется сектором 24, по окружности которого сделан клиновой паз для ввода штока гидропривода. При поворотах сектора 24 рычагом,, надеваемым на ось 25, движение передается штоку гидропривода 19, а через него - зубчатому зацеплению 20 и 21.
Для устранения действия изгибающих усилий на ось 4 подвижной рамы 3 к последней прикреплен кронштейн 26, который при поворотах скользит по упору 27.
Поступательное перемещение гидромонитора во время работы осуществляется третьим гидроприводом 28, который выполнен также в виде пилинДра. На поршневом штоке гидропривода 28 укреплена зубчатая рейка 29, которая приводит во вращение шестерню 50 свободно насаженную на ось ходовых колес 2 гидромонитора. Шестерня 30 посредством храпового механизма двухстороннего действия приводит во вращение ось с колесами 2. Гидроприводом 28 управляют от ножной педали 31 через тягу 32, которая управляет золотником 33.
Возможность поворота ствола 9 гидромонитора в вертикальной и
горизонтальной плоскостях обеспечивает гибкое соединение, например, резиновый шланг 34, который соединяет гидромонитор с наружной трубой 35„ подающей воду. Труба 85, монтированная на раме 1, имеет телескопическое устройство и при работе сдвигается с внутренней трубой 36, присоединенной к напорному трубопроводу.
Управляющий монитором во время работы сидит в седле 37 и защищен кабиной 38 от попадания на него воды и; кусков угля (кабина показана пунктиром). Бо-ковые стороны кабины закрываются фартуками из прорезиненной материи. В кабине имеются смотровые окна, защищенные сталинитовыми стеклами, которые позволяют наблюдать за работой. На обойме ствола гидромонитора помещен прожектор 39, всегда освещающий место удара струи.
Телескопическая часть устройства гидромонитора показана на фиг. 3. Внутренняя труба 36 может скользить в наружной трубе 35 при помощи направляющих шариков 39. Применением направляющих шариков 39 уст1раняется необходимость обработки) внутренней поверхности наружной трубы 55 и к тому же значительно уменьшается трение.
Манжета 40 сальникового уплотнения крепится к наружной трубе 35. Внутренняя труба 36, во избежание быстрого износа и заедания манжеты 40, по поверхности чисто обработана. Для поглощения толчков при передвижения гидромонитора и предохранения гибкого патрубка 42 от разрыва служат спиральные пружины 41. На конце внутренней трубы 36 для плавного перехода потока воды в наружную трубу ставится раструб 44.
После полного перемещения гидромонитора внутренняя труба 36 телескопа вместе с гибким патрубком 42 отсоединяется от напорного трубопровода и вдвигается в наружную трубу, а в разрыв вставляется наращиваемая труба.
Для облегчения конструкции необходимо для телескопической части монитора применять трубы из
хромистых нержавеющих сталей. Такие трубы тонкостенны и устойчивы против эрозии.
Впереди гидромонитора помещается плужный отвал из листового железа, который отваливает отбитый уголь в сторону желОбов и расчищает путь для гидромонитора.
При очистных рабОтах (фиг. 4) ставится длинный ствол 9, удерживаемый двумя канатами, натяжение которых при перемещении ствола в вертикальной плоскости поддерживается постоянным. Это достигается наматыванием обоих канатов на один общий барабан, который связан с механизмом перемещения ствола 9 в вертикальной плоскости. Для устойчивости ствола в поперечном направлении канаты внизу разведены по сторонам гидромонитора.
Для работы на пологопадающих пластах должны быть изменены в соответствующих плоскостях тчмько углы поворота ствола, для чего требуется конструктивное изменение некоторых механизмов поворота. При этом конструкция монитора в целом получается значительно проще.
Для работы на крутопадающих пластах с углом падения меньще 70° механизм пово;рота ствола гидромонитора в вертикальной плоскости переставляется путем поворота его вокруг оси телескопа па угол, равный 90°-а. (где а - угол падения пласта), т. е. плоскость механизма поворота ствола в вертикальном направлении совмещается с плоскостью падения пласта.
Скос гидромонитора на крутопадающих пластах к той или другой стороне штрека осуществляется вследствие свободного вращения внутренней трубы телескопа в наружной.
На фиг. 5 показана другая форма выполнения гидропривода в виде гидропривода динамического действия. Этот гидропривод состоит из двух турбинок активного типа, например в форме колес Пельтон-а 43, которые сидят на общем валу и имеют лопатки, направленные в противополол ;ные стороны. Против
каждого из колес 43 помещено по соплу, через которое на лопатки колеса поступает вода из трубопровода. Оба сопла закрыты игольчатыми клапанами 45, находящимися ПОД действием цружин и связанными с сердечниками соленоидов 46. При замыкании цепи того или другого соленоида 46 сердечник соленоида втягивается в него и оттягивает игольчатый клапан 45 соответствующего сопла, открывая воде доступ лопатки турбинки. В то же время сердечник соленоида 46 со скрепленным с ним рычагом 48 упирается в П-образную тягу 49, управляющую тормозными колодками тормозных дисков 47 На концах вала колес 43, и растормаживает их, независимо от того, который из соленоидов 46 сработал.
При прекращении подачи тока игольчатый клапан закрывает доступ воды к колесу 43, в то же время происходит торможение обоих дисков вала 43 гидропривода. Направление вращения зависит от того, который не соленоидов 46 включается и, следовательно, к которому из колес 43 подается вода. Такое устройство позволяет осуществить дистанционное управление гидромонитором при помощи проводов, которые идут от
щита главного управления к катушкам соленоидов, управляющий; поступлением воды в сопла колес 43 соответствующих гидроприводов.
Предмет изобретения
1.Пе-редвижной гидромонитор с гибким соединением ствола с трубопроводом и с телескопическими трубами, отличающийся применением трех гидроприводов 28, 19 и 14 статического действия, приводимых в- действие от напорной воды, подав аемой в гидромонитор, из которых гидропривод 28, установленный па пе1редв«жной раме 1, предназначен для передвижения при помощи соответствующей передачи всего устройства; гидропривод. 19, устаповленпый на вращающейся раме 3,- для вращения ствола 9 в горизонтальной плоскости; гидропривод 14 - для вращения ствола 9 в вертикальной плоскости.
2.Гидромонитор по п. 1, отличающийся тем, что сопла для подачи жидкости в гидроприводы- динамического действия, снабжены подпружиненнымиигольчатыми клапанами, управляемыми на расстоянии при помощи электрс магнитного реле.
| название | год | авторы | номер документа |
|---|---|---|---|
| Выемочный агрегат | 1984 |
|
SU1229366A1 |
| Гидромонитор со светящейся струей воды | 1950 |
|
SU92843A1 |
| СКВАЖИННЫЙ ГИДРОМОНИТОР | 1998 |
|
RU2123111C1 |
| Гидромониторная установка | 1948 |
|
SU80226A1 |
| УСТРОЙСТВО ДЛЯ ВОДОСТРУЙНОЙ ОБРАБОТКИ ТОПОЧНЫХ ЭКРАНОВ ЭНЕРГЕТИЧЕСКИХ КОТЛОВ | 2003 |
|
RU2267073C2 |
| Шагающий механизм для квадратно-гнездовых сеялок | 1958 |
|
SU122971A1 |
| ГРУНТОЗАБОРНОЕ УСТРОЙСТВО ЗЕМЛЕСОСНОГО СНАРЯДА | 1970 |
|
SU284718A1 |
| Подъемная установка | 1990 |
|
SU1782906A1 |
| Устройство для очистки и окраски наружной поверхности корпуса судна | 1978 |
|
SU747771A1 |
| Гидромонитор | 1974 |
|
SU633321A1 |
28
tSBET n Нт Г
