Изобретение относится к машиностроению, в частности к конструкциям грузозахватных устройств подъемно-транспортного оборудования.
Целью изобретения является повышение надежности работы и точности базирования, а также уменьшение габаритов устройства.
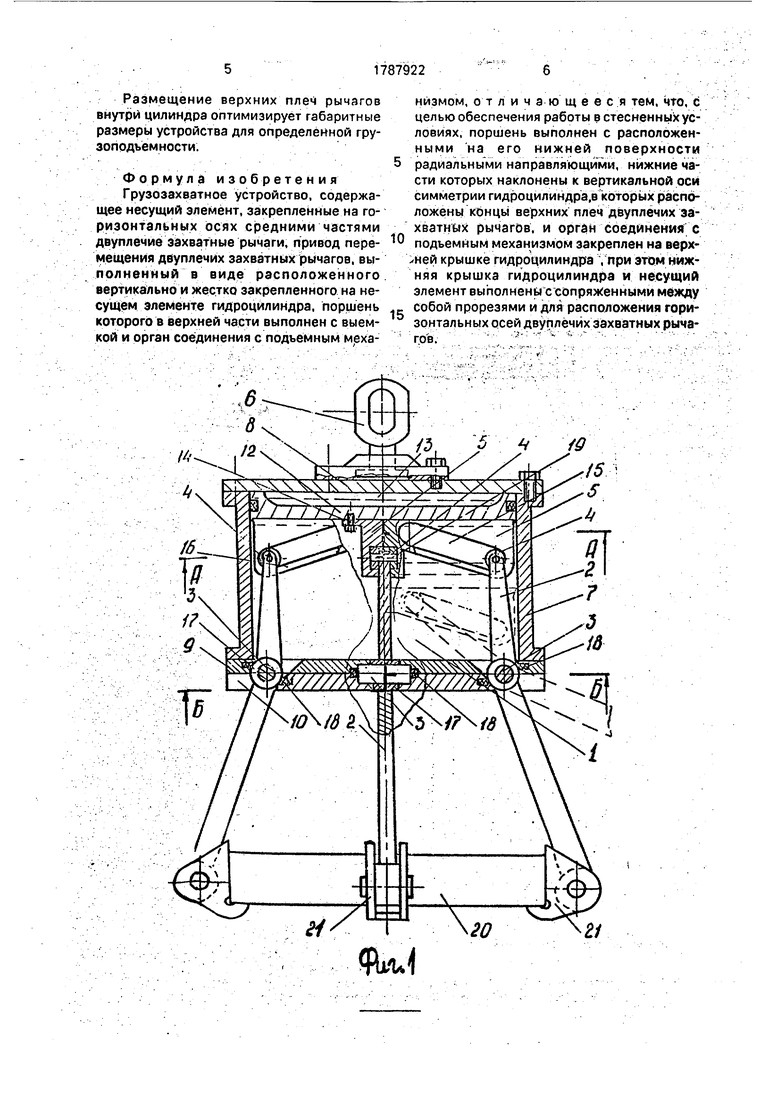
На фиг.1 изображен общий вид одного из возможных вариантов исполнения захватного устройства с гидравлическим приводом; на фиг.2 - ступенчатый горизонтальный разрез А-А на фиг.1; на фиг.З - ступенчатый горизонтальный разрез устройства Б-Б на фиг.1.
Захватное устройство содержит гидравлический привод 1 и двуплечие захватные рычаги (рычажные захваты) 2, соединенные между собой посредством осей 3 и роликов 4. Ролики 4 установлены с возможностью перемещения в направляющих 5. Устройство содержит для связи с грузоподъемной машиной, например, петлю 6, установленную на гидроприводе 1. Гидропривод 1 выполнен в виде бесштокового силового гидроцилиндра, внутри которого размещены верхние плечи рычагов 2. На корпусе 7 гидроцилиндра закреплено верхнее днище 8, например, болтами. Нижнее днище гидроцилиндра выполнено в виде дйух дисков - верхнего 9 и нижнего 10, скрепленных между собой и с корпусом 7 винтами 11. Внутри гидроцилиндра установлен с возможностью перемещения поршень 12 посредством подаваемой под давлением в над- или подпоршнёвую поЛЙСтй гй линдра жидкости, например, Уйпа AM Г-10. В верхнем крайнем положении поршня 12 надпоршневая полость образована за счет выемки 13 в поршне 12. На нижней части поршня 12 по числу рычагов 2 установлены радиально и закреплены, например/посредством болтов 14 направляющие 5. Каждая налравляющая состоит из двух, разъемных по радиусу Щршня 12 симметричных частей. В части направляющей 5 образован наклонно к продольной части оси захвата устройства по радиусу поршня 12 паз 15. В пазу 15 установлены с возможностью перемещения по нему ролики 4 рычагов 2. Для прохода верхней части рычага 2 при движении роликов 4 в частях направляющих радиаЛьно образованы окна 16.
Ё
Х| СО
3
Ю
го
31787922 4
Верхнее и нижнее плечи захватного ры- формы от продольной оси захвата первый из чага 2 закреплены неподвижно, например соприкоснувшихся к детали рычагов 2 про- приварены на втулке 17. Во втулке 17 уста- изводит ее смещение в сторону диаметраль- новлена ось 3, закреплённая неИйдвйжн Н между верхним 9 и нижним 10 дисками ниж- их центров.
него днища гидроцилиндра в пазах. В дис-При освобождении от захвата за счет ках 9 и 10 образованы пазы, в которых равномерного отхода всех рычагов 2 деталь установлены с возможностью поворота остаётся строго на месте укладки, напри- втулки 17. Пазы образованы на периферии 10 мер, в зажимном устройстве карусельного нижнего днища перпендикулярно плоско- станка, у С
сти поворота рычага 2. Для предотвращенияВ других вариантах исполнения предла- утечки жидкости в местах установки втулки гаембго устройства, например, возможна 17 и оси 3 установлены уплотнения 18. Ро- установка меньшего или большего количе- Улйкй4 на рычагах 2 закреплены на осях 19 15 ствадвуплечихрычагов. Это может быть по одному с каждой стороны рычага 2. На обусловлено формой захватываемой нижних плечах рычага 2 для захвата детали ли, ее массой или, например, характеристи- 20 установлены на осях губки 21. К ами мест укладки и захвата.
Захватное устройство работает следую- „ Может быть изменен характер крепле- щим образом. .. ния захватных органов (рычагов), увеличено
П рй подготовке устройства к работе количество роликов 4 (или вообще они отсут- жйдкость поддавлением от вйешйёго ствуют, а образована пара скольжения), уп- : Htii r p Mfei eH:H%6V Ha npHM ep,.Ha py$b- рочНёны места установки осей 3 и характер пЬ дье ной машине, по магистрали „5 их уплотнений. Это определяется массовой подается через штуцер в надпоршневую по- долей или величиной рабочего давления лость 13.. Поршень 12 движется вниз, при жидкости. ;
этом жидкость из подпоршневой полости Предлагаемое устройство, его конструк- вытёсняется из гидроцилиндра по магист- тивное решение, позволяющее проиэво- рали в грузоподъемную машину. При движе- JQ дить захват детали и ее освобождение, а нии поршня 12 вниз ролики 4 также манипулирование с ней в любой пло- перемещаются по пазу 15 направляющей 5 скости без изменения рабочих характери- k центру поршня, при этом передвигается стйк может быть применено в верхнее плечо рычага 2 к центру гидроци- роботрстроении, например, как захватное линдра. Рычаг 2 поворачивается на оси 3, 35 устройство мощных загрузочных промыш- нижние плечи совместно с захватными губ- ленных роботов или манипуляторов. В этом ками 21 разводятся от продольной оси за- случае. Например, при закреплении устрой- хвата по радиусам в стороны. При этом ства в руке робота посредством жесткого радиусу отвода всех нижних плеч рычагов 2 разъемного крепления к верхнему днищу 8 равны между собой, что обеспечено конст- 40 устройства, вариант исполнения устройства руктивным исполнением привода.будет без применения петли 6.
Захватное устройство с помощью f i f - J.---: зоподъемной машины за счет связи посред-Для достижения цели изобретения в ством петли 6 переносится к предлагаемом устройстве используется мй- размещения детали 20 и устанавливается 45 нимальная по протяженности кинематиче- над ней на необходимой высоте. Жидкость екая цепь разворота двуплечего рычага под давлением подается в подпоршневую относительно оси крепления толкателем полость. Поршень 12 перемещается вверх,, / (поршнем), что увеличивает надежность уст- при этом ролики 4 перемещаются от центра ройства. Подвижные пары Находятся при на периферию, двигаясь в пазах 15направ- своей работе в масляной ванне, что позволяющих 5. Рычаги 5 поворачиваются на осях ляет применить высокоточные пары враще- 3 до соприкосновения губки 21 с деталью 20 нйя, скольжения или качения, что и сжимают ее с необходимым усилием, ко- обеспечивает значительную точность и син- торое определяется величиной подаваемо- хронность разведения и сведения захватов го давления в подпоршневую полость. и, следовательно, определяет степень оценЦентрирующее воздействие устройство ки характера положения детали в захвате, оказывает на деталь как при захвате, так и усилие ее обжатия, а также базирования как при освобождении ее от захвата.при нахождении детали в захвате, так и при
При захвате в случае отклонения гео- освобождении от него, т.е. при установке на метрического центра детали дискообразной рабочее место.
Размещение верхних плеч рычагов внутри цилиндра оптимизирует габаритные размеры устройства для определённой грузоподъемности.
Формула изобретения Грузозахватное устройство, содержащее несущий элемент, закрепленные на горизонтальных осях средними частями двуплечие захватные рычаги, привод перемещения двуплечих захватных рычагов, выполненный в виде расположенного вертикально и жестко закрепленного на несущем элементе гидроцилиндра, поршень которого в верхней части выполнен с выемкой и орган соединения с подъемным меха0
5
нйзмом, отличающееся тем, что, с целью обеспечения работы в стесненных условиях, поршень выполнен с расположенными на его нижней поверхности радиальными направляющими, нижние части которых наклонены к вертикальной рей симметрии гидроцилиндра.в которых расположены концы верхних плеч двуплечих захватных рычагов, и орган соединения с подъемным механизмом закреплен на верх хней крышке гидроцилиндра , при этом нижняя крышка гидроцилиндра и несущий элемент выполнены с сопряженными между собой прорезями и для расположения горизонтальных осей двуплечих захватных рычагов. v . ..
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумное грузозахватное устройство | 1985 |
|
SU1324980A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1998 |
|
RU2137347C1 |
| Вакуумное грузозахватное устройство | 1985 |
|
SU1306881A1 |
| Грузозахватное устройство | 1986 |
|
SU1364592A1 |
| Вакуумное грузозахватное устройство | 1982 |
|
SU1054268A2 |
| Грузозахватное устройство | 1987 |
|
SU1532510A1 |
| Грузозахватное устройство | 1977 |
|
SU742338A1 |
| Захватное устройство для изделий с конусной вертикальной полостью | 1990 |
|
SU1740303A1 |
| ТЕЛЕСКОПИЧЕСКОЕ ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО | 1990 |
|
SU1837550A1 |
| ГИДРАВЛИЧЕСКИЙ СЪЕМНИК | 1996 |
|
RU2130376C1 |

Использование: захват и транспортировка грузов. Сущность изобретения: грузозахватное устройство содержит несущий элемент, двуплечие захватные ычаТйГ роцилиндр, поршень kotupbrb выполнен с радиальными наклонными направляющими для расположения верхних плеч двуплэчих захватных рычагов и выемкой на верхней части.3 ил.
| Привод захватных органов | 1985 |
|
SU1323517A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
