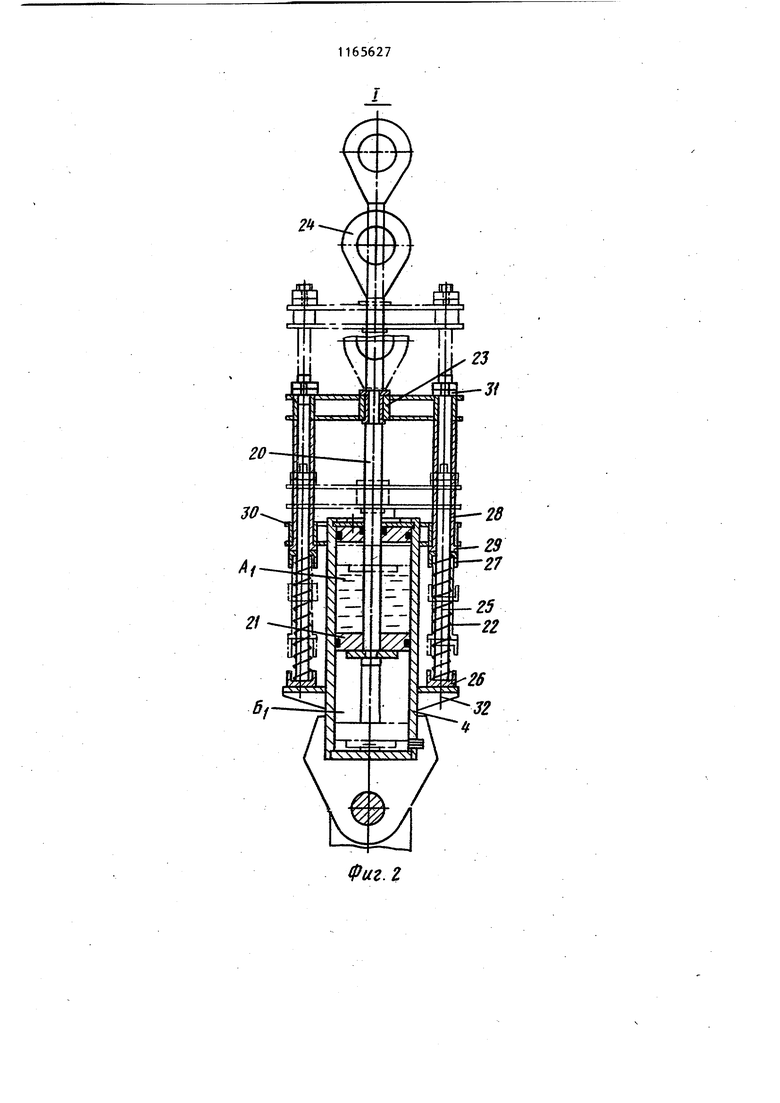
Изобретение отвосится к подъемно транспортному ма шиностроению, в час ности к грузозахватным траверсам. Цель изобретения - повышение нa дежности. На фиг.1 изображена траверса,общ вид; на фиг.2 - узел t на фиг.1.. Грузозахватная траверса содержит несущую балку 1, представляющую собой,цилиндрическую трубу, которая снабжена охватывающей ее и установ ленной с возможностью перемещения вдоль нее и поворота вокруг ее продольной оси втулкой|(2, на оси 3 которой шарнирно укреплен гидроцилиндр 4 с наибольшей площадью поршня. На оси 5 2 шарнирно установлен ролик 6 для закреплений грузовьЕк стропов 7, На несущей балке 1 также установлены две таки же втулки 8, на осях 9 которых шарнирно соответственно укреплены гндроцилиндры 10 и 11, а между ними - втулка-подвеска 1,2, на оси 13 которой шарнирно установлен ролик 14 для закрепления стропов 7. С двух сторон втулок 2 и 8, а также втулки-подвески 12 на несуще балке 1 установлен набор колец 15 мерной длины, а на торцах балки 1 и слева от внутренней втулки 8 закреплены упорные фланцы 16 с регулировочными винтами 17, взаимодействующими с подвижными фланцами 18. Справа от втулки 2 на балке 1 неподвижно закреплено кольцо 19. Гидроцилиндры 4, 10 и 11 одност роннего действия соответственно со держат штоки 20 и поршни 21, при этом рабочие штоковые площади 5, Зд, и Sg каждого гидроцилиндра про порциональны грузоподъемности Р, р2 и РЗ соответствующего крана A. р РХ pj Штоковые, полости к.аждого гидроцилиндра ( А, А,, и А ) заполнены рабочей жидкостью и поршень 21 со штоком 20 подпружинен двумя пружинами 22, установленньми вне корпуса гидроцилиндра параллельно его верт,икальной оси. Пружины 22 каждого гидроцилиндра взаимодействую с поршнемчерез кронштейн 23,закрепле ный к верхней части штока 20. На штоке каждого гидроцилиндра закреплена про ушина 24 для навешивания на крюук крана Кажддя пружина 22 установлена на направляющем стержне 25 между упоро 26, жестко закрепленным к нижнему концу направляющего стержня 25, и стаканом 27, установленным с возможностью перемещения по направляющему стержню 25. На последнем установлена с возможностью перемещения скольжения втулка 28 с опорным пояском 29 в нижней части, взаимодействующим со -стаканом 27. Каждая скользящая втулка 28 установлена с возможностью перемещения вдоль направляющего стержня 25 в цилиндрическом отверстии, вьшолненном в « ограничительном кронштейне 30, жестко закрепленном в верхней части корпуса гидроцилиндра, а верхним торцом взаимодействует (в исходном положении поршня и при его перемеще-.,, НИИ вниз of последнего) с кронштейном 23. Каждый направляющий стержень 25 верхней частью помещен в вертикальное цилиндрическое отверстие, выполненное в кронштейне 23, и зафиксирован регулировочными гайками 31 с возможностью взаимного перемещения . Нижней частью направляющий стержень 25 через упор 26 взаимодействует (в исходном положении поршня и при его перемещении вниз от последнего) с опорной пятой 32, жестко закрепленной к нижней части корпуса гидроцилиндра. Штоковые полости А. соответствующих гидрощшиндров 4, 10 и 11 сообщаются между собой посредством гибких шлангов 33, и гидросистема содержит реле 34 давления. Поршневые полости Б, Б2.И 63 гидроцилиндров 4, 10 и 11 через клапан 35 сообщается с атмосферой. Клапан 35, установленный в нижней части поршневой полости каждого гидррцилиндра, предохраняет полость от избыточного давления при движении поршня 21 вниз и от разряжения - при движении поршня 21 вверх. Грузозахватная траверса работает следующим образом. Расчетнымпутем определяются (подбираются) необходимые размеры плеч относительно вертикали подвеса центра тяжести груза, т.е. места закрепления втулок 2 и 8 и втулкиподвески 12 на несущей балке 1 с помощью подбора и. перестановки колец 15 и закрепления (стягивания) их подвижными фланцами 18 с помощью регулировочных винтов 17 упорных фланцев 16. По найденным размерам плеч соот ветственно устанавливаются грузовы крюки кранов в требуемое положение и производится их строповка за проушины 24 штоков 20 гидроцилиндр 4, 10 и 11. При необходимости с помощью рег лировочных гаек 31 производится регулировка исходного положения поршней 21, при этом с заданным (требуемым) усилием 22 каж дого гидродилиндра, которые упираются в стаканы 27, а через них - в опорные пояски 29 скользящих втуло 28 и ограничительные кронштейны 30, перемещают кронштейн 23 штока 20 совместно с поршнем 21 в требуемое положение, при этом уп ры 26 упираются в опорную пяту 32. После этого производится строповка поднимаемого груза (на фиг. 1 и 2 не показано, например, аппарата колонного типа, монтаж которого производится методом пово рота вокруг шарнира с подтаскивани . ем тремя кранами различной грузоподъемности) с помощью грузовых стропов 7 к роликам 6 и 14 втулки 2 и втулки-подвески 12. Затем еще раз проверяется соответствие необходимых размеров плеч фактически полученным и при необходимости еще раз корректируют (корректировку пр изводят до тех пор, пока сумма моментов от нагрузок на крюки кранов относительно вертикали подвеса центра тяжести груза не будет равна нулю). После эТого с помощью грузовых лебедок кранов по очередно выбирают слабину в каната их грузовых полиспастов и стропов и производят подъем одновременным включением всех кранов. Если вследствие каких-либо причин, например запаздывания включением одного из кранов в работу или незначительной разности скорос тей подъема крюков, какой-то один кран или два крана вступят в работу раньше остальных, то под действием дополнительной нагрузки, которая через проушину 24 штока 20 передается на поршень 21, давление в штоковой полости А,, этого гидро- цилиндра возрастает, и рабочая жидкость по гибким пшангам 33. начинает перетекать во все штоковые полости остальных гидроцилиндров 10 и 11. В это время непосредственно подъем происходить не будет, пока под действием поршня 21 рабочая жидкость из штоковой полости А- будет выжиматься в остальные полости AZ и АЗ , т.е. в те полости гидроцилиндров, соответственно краны которых еще не вступили в работу, перемещая их поршни 21 совместно со штоками 20 вниз, при этом кронштейны 23 с направляющими стержнями 25 также будут перемещаться вниз, сжимая с помощью скользящих втулок. 28 с опорными поясками 29 и стаканов 27 пружины 22, а поршневые полости Б , Gj и 6j сообщаются через клапаны 35 с атмосферой (на фиг. 2 показано тонкой штрих-пунктирной линией). Это будет продолжаться до тех пор пока давление в гидросистеме не уравновесится, т.е. пЬка не произойдет равномерное распределение нагрузклГ на каждый кран пропорционально его грузоподъемности, так как рабочая площадь поршня каждого гидроцилиндра пропорциональна грузоподъемности соответствующего крана, и только после этого начнется подЬем груза всеми кранами одновременно, плавно, без рывков. TaioiM путем уравновешиваются нагрузки на все краны не только в первоначальный момент подъема, но и в процессе всего подъема. Аналогичньм путем происходит уравовешивание нагрузок на краны и ри некоторой разности скоростей одъема крюков, так как кран (или ва крана), крюк которого обгоняет стальные, получает перегрузки, .е. давление в штоковой полости оответствующего цилиндра возрастает. Процесс уравновешивания отличатся от описанного только тем, то он протекает на всем протяжеии подъема груза, т.е. выжимание абочей жидкости из штоковой полоси цилиндра того крюка, который обоняет остальные, происходит непреывно до конца подъема. За счет того крюки кранов находятся на азных уровнях,уровень рабочей жидости в цилиндрах также изменяется, траверса не перекашивается. При снятии нагрузки с проушин 24 груза,давление в гидросистеме траверсы
штоков 20 гидроцилиндров 4, 10 и 11, т.е. после подъема и расстроповки
1165627
падает и поршни 21 под действием пружин 22 занимают исходное положение,

| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватная траверса | 1980 |
|
SU922039A1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305637C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305638C1 |
| Грузозахватное устройство | 1976 |
|
SU647224A1 |
| Захват-кантователь | 1981 |
|
SU975556A1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305636C1 |
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| Грузозахватное устройство | 1988 |
|
SU1696371A1 |
ГРУЗОЗАХВАТНАЯ ТРАВЕРСА по авт.св. № 922039, отличающаяся тем, что, с целью повышения надежности, каждый гидрощшиндр снабжен размещенным снаружи его корпуса кронштейном, закрепленным в верхней части штока, жестко закрепленными на корпусе гидроцилиндра и размещенными соответствен.но в его верхней и нижней частях ограничительным кронштейном и опорной пятой, причем в кронштейне, закрепленном на щтоке, ц ограничительном кронштейне выполнены диаметрально расположенные две пары соосных отверстий, в которых размещены параллельно продольной оси гидроцилиндра с возможностью перемещения вдоль нее направлякмцие стержни, каждой из которых снабжен закрепленным на его нижнем конце упором для взаимодействия с опорной пятой и охватьгеаюшими этот стер-жень.стаканом и скользящей втулкой, установленными с возможностью их перемещения вдоль этого направляющего стержня, причем нижний торец скользящей втулки выполнен с опорным пояском для взаимодействия с нижней горизонтальной поверхностыо ограничительного кронштейна и стаканом, размещенным на направляющем стержне между упором и скользящей вт улкой, а верхний конец направляющего стержня выполнен с резьбой и на(Л винченной на него регулировочной гайкой для взаимодействия с верхней горизонтальной поверхностью кронштейна, закрепленного на штоке, и с верхним торцом скользящей втулки, при этом каждый направляющий стержень снабжен пружиной для О5 1 возврата поршня в исходное положение, надетой на этот стержень на ел участке между упором и стаканом, а СП весущая балка представляет собой 1чЭ цилиндрическую трубу и снабжена 1 охватьгоающими ее и установленными -л с возможностью поворота вокруг ее . продольной оси симметрии втулками, с которыми шарнирно соединены своими нижними частями корпусы гидроциЛиндров.
| Грузозахватная траверса | 1980 |
|
SU922039A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
