3 f3 8
ч /
W
(Л
фиг.6
А7
лена П-образная проме.чкуточная рама 13, ...к которой посредством шарнирных тяг 19 прикреплена никняя П-образная рама 18, на которой установлена траверса -2 с возможностью перемещения. На траверсе установлены подпружинен- ненные приводные карегки с захватными органами, каждьпй из которых включет в себя два перпендикулярно расположенных захватных шт:ыря для петель груза и захватную вш1:ку для груза, снабженного стержнями с головкой.
На раме 18 закреплены также приводные обоймы с опорными роликами 46 и 47 и упорами для груза. С помощью привода 24 обеспечивается перемещение траверсы относительно изделия, ее ориентация относительно изделия с использованием приводов 43 и 44, а также перемещение кареток и наведение захватных органов. Устройство обеспечивает захват изделий с различным расположением петель или стержней с головкой. 1 з.п. ф-лы, 10 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для формования и вулканизации покрышек | 1973 |
|
SU430605A1 |
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU946733A1 |
| Грузозахватная траверса | 1978 |
|
SU765186A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Устройство кривовязюков для вырубкизАгОТОВОК из пОлОСОВОгО илЕНТОчНОгО МАТЕРиАлА | 1979 |
|
SU804501A1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| Захватное устройство | 1986 |
|
SU1493586A1 |
| Устройство для перегрузки изделий | 1982 |
|
SU1065316A1 |
| Автоматический станок для изготовления петель | 1927 |
|
SU32471A1 |

Изобретение относится к подъем-, но-транспортному машиностроению, а именно к грузозахватным устройствам. Цель - расширение эксплуатационных возможностей путем обеспечения пространственной ориентации траверсы относительно груза с различным расположением грузоподъемных приспособлений. Устройство содержит несущую раму 1, на которой через подпружиненную ось 6 с упором 9 и втулку 11 закреп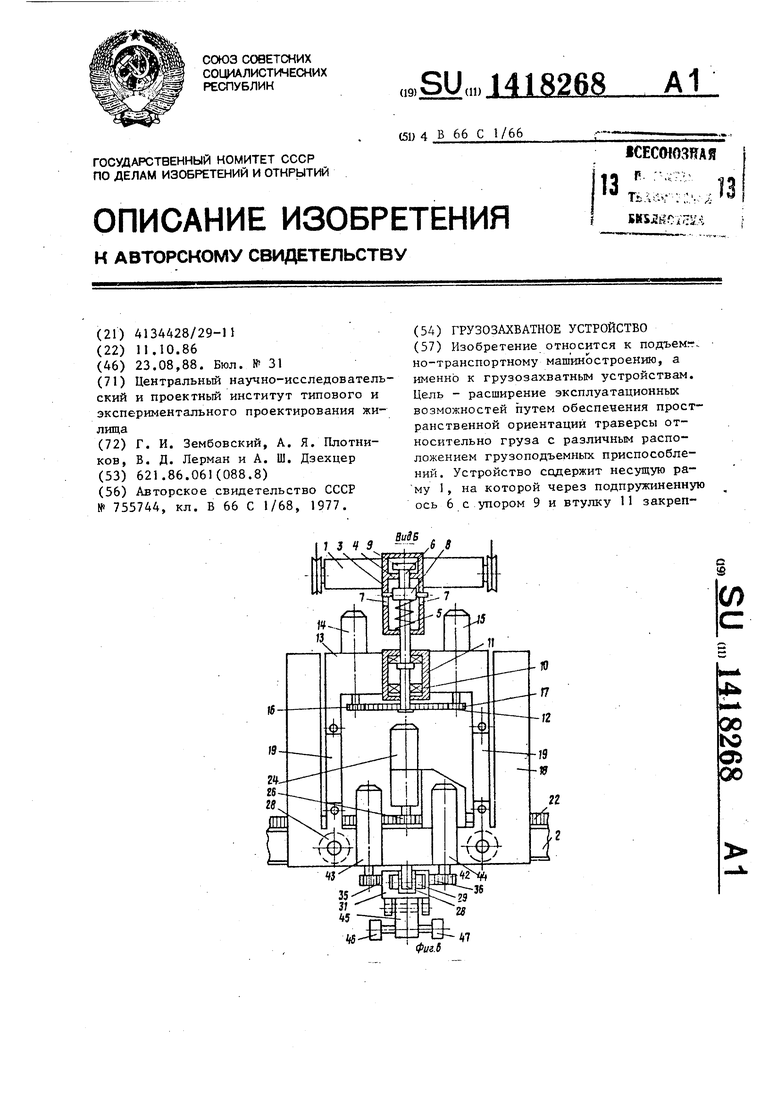
1
Изобретение относится к подъемно- транспортному машиностроению, а имен но к грузозахватным устройствам, пре имущественно для строительных изделий.
Целью изобретения является расширение эксплуатационных возможностей устройства путем обеспечения пространственной ориентации траверсы относительно груза с различным располо жениеМ грузоподъемных приспособлений.
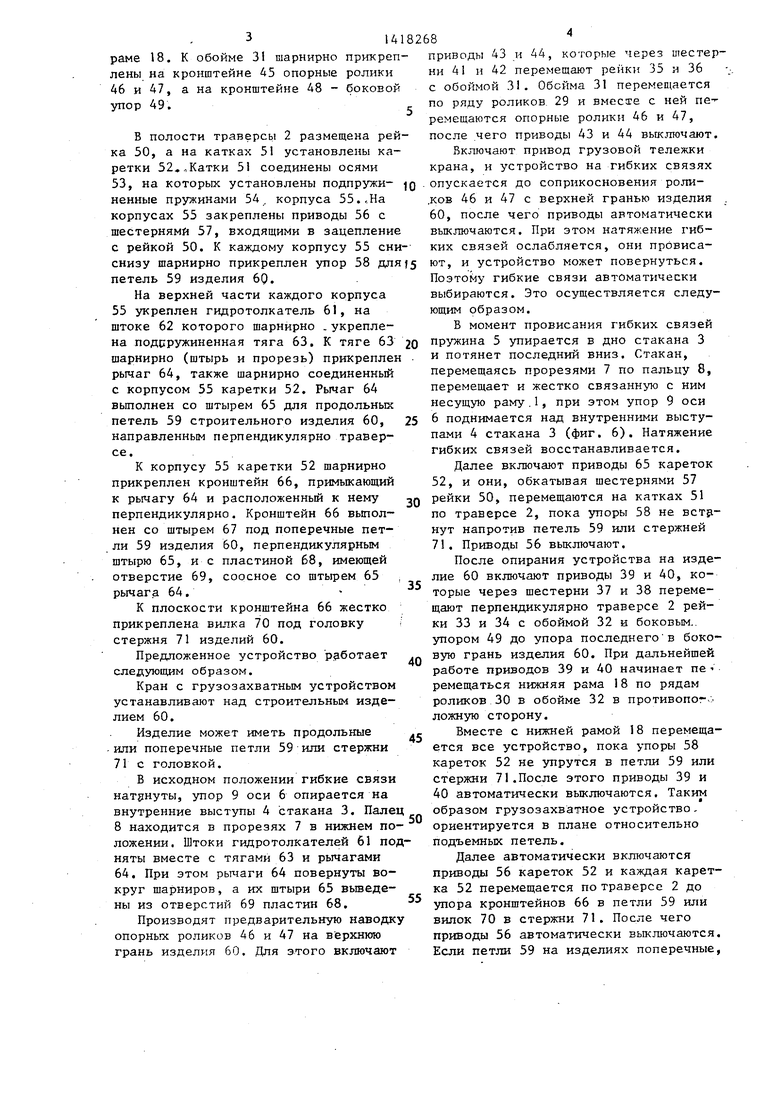
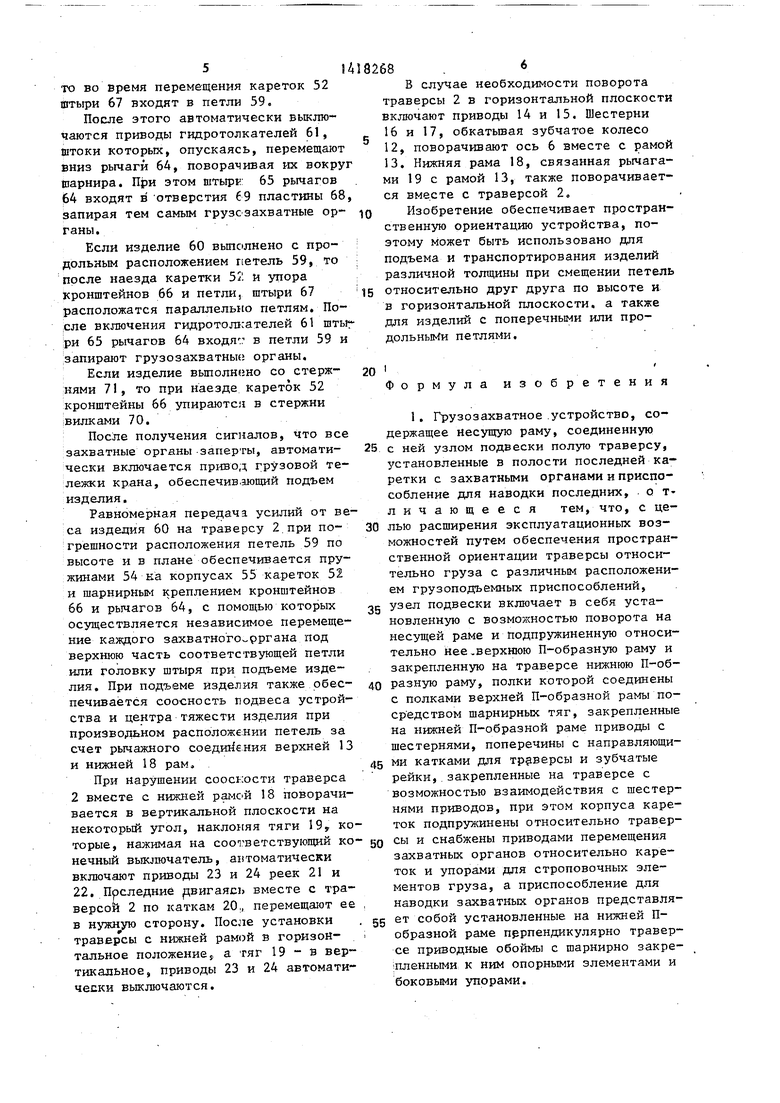
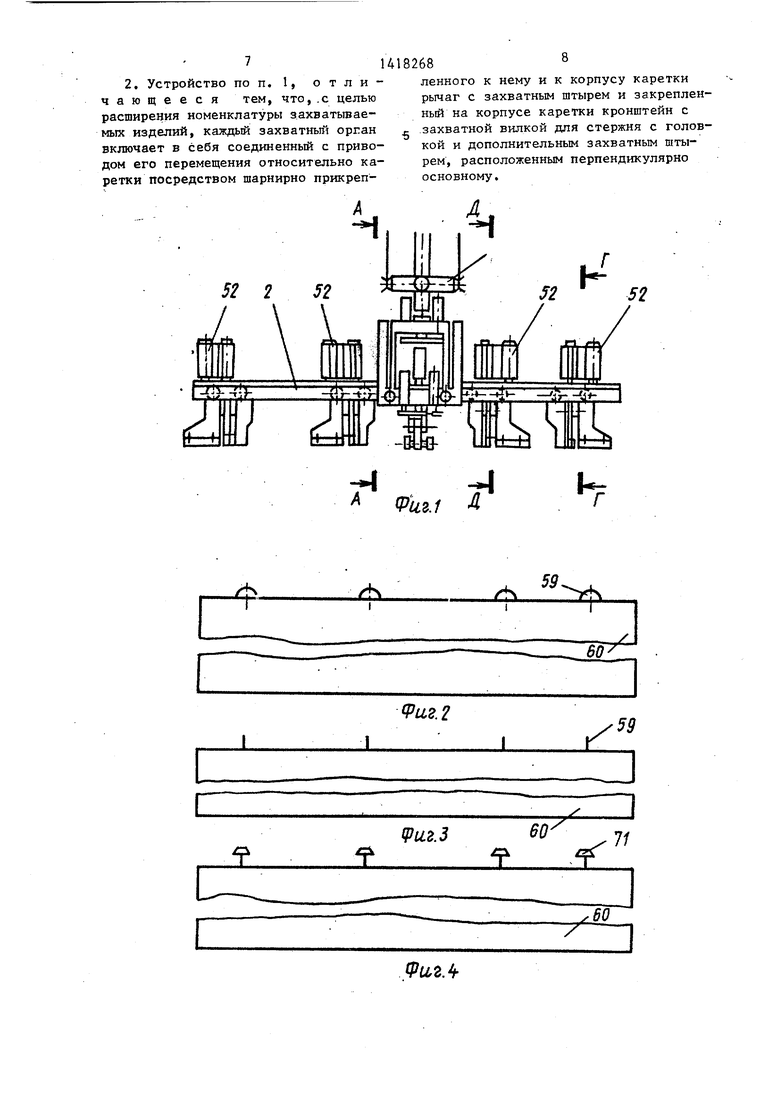
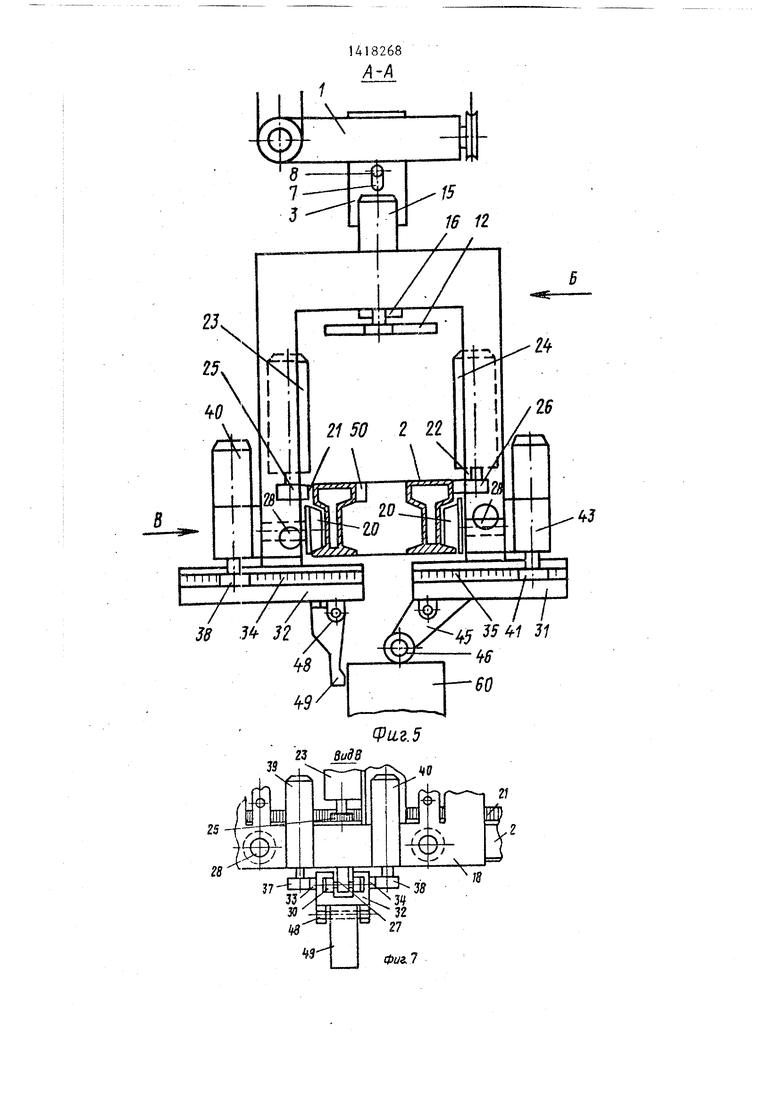
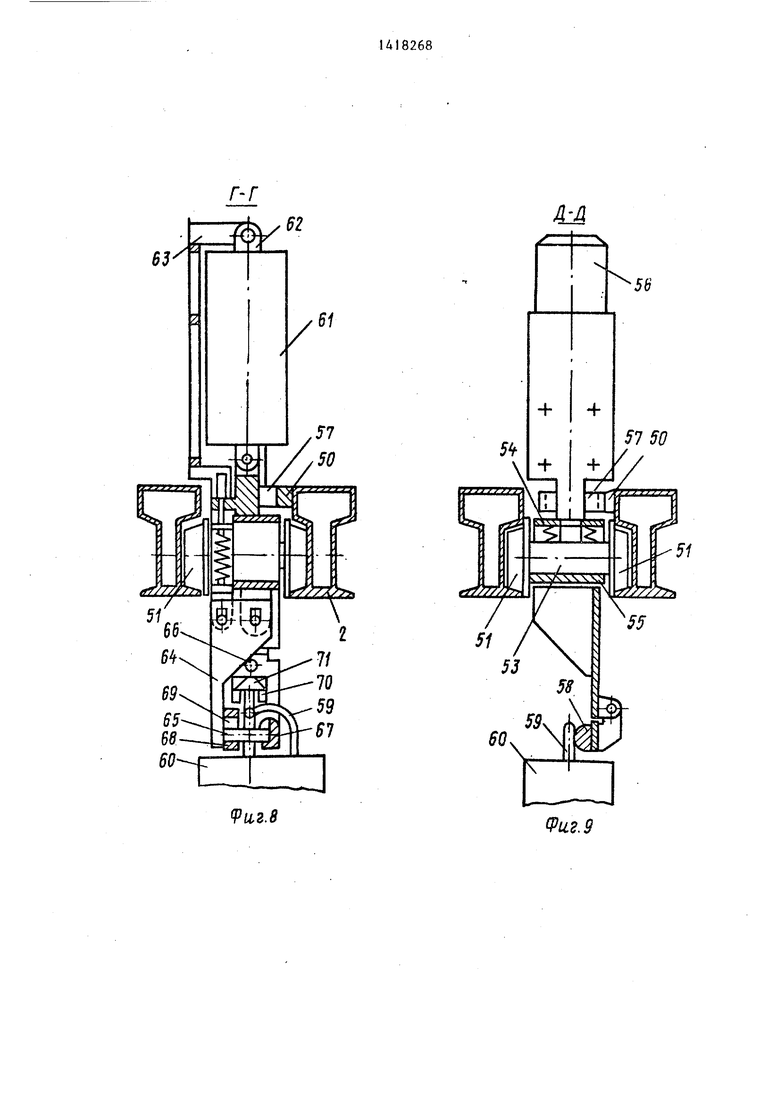
На фиг. 1 показано грузозахватное устройство, общий вид; на фиг. 2 - изделие с петлями, ориентированными вдоль; на фиг. 3 .- то же, с петлями, ориентированными поперек; на фиг. 4 - изделие сэ стержнями с головками; на фиг. 5 - разрез А-А на фиг. 1; на фиг. 6 - вид Б на фиг. 5; на фиг. 7 - вид В на фиг. 5; на фиг. 8 - -разрез Г-Г на фиг. 1; на фиг. 9 - разрез Д-Д на фиг. 1; на фиг. 10 - захватный орган.
Грузозахватное устройство подвешивается на гибких связях к грузовой тележке крана и содержит несущую полую раму i, в полости которой по центру выполнен узел подвески полой траверсы 2.
Узел подвески траверсы снабжен жестко укрепленным в полости несущей рамы 1 стаканом 3 с внутренними, вы- стзтами 4 и расположенной в нем под- пружиненной пружиной 5 осью 6. На боковых сторонах стакана 3 имеются прорези 7, в которые установлен палец 8 с центральным отверстием под ось 6.
„
Пружина 5 зажата между пальцем 8 и днищем стакана 3. К верхнему концу оси 6 жестко прикреплен упор 9, расположенный выше внутренних выступов 5 4 стакана 3. Нижний конец оси 6 пропущен через днище стакана 3, подтип / НИКИ 10, втулку И и снабжен зубчатым колесом 12. На втулке 11 плотно посажена П-образная верхняя промежуточная рама 13, на которой закреплены приводы 14 и 15 с шестернями 16 и 17, входящими в зацепление с зубчатым колесом 12. Верхнюю раму 13 снизу охватьюает нижняя промежуточная П-образная рама 18.
Консоли рам 13 и 18 попарно соединены шарнирными тягами 19. В основании нижней рамы 18 установлены направляющие катки 20, на которые .оперта траверса 2. Вдоль траверсы 2 снаружи закреплены рейки 21 и 22, имеющие приводы 23 и 24 с шестернями 25 и 26, входящими соответственно в за- 25 цепление с рейками 21 и 22. Приводы 23 и 24 закреплены на раме 18.
Снизу к центральной части рамы 18 на кронштейнах 27 и 28 прикреплены ряды роликов 29 и 30, расположенньш
10
15
20
30
перпендикулярно траверсе 2.
Ролики 29 охватывает обойма 31, а ролики 30 - обойма 32. К обоймам 31 и 32 вдоль них жестко прикреплены с двух сторон рейки 33, 34 и 35, 36, Рейки 33 и 34 входят в зацепление с 35 шестернями 37 и 38 приводов 39 и
40, закрепленных на раме 18, а рейки 35 и 36 - с шестернями 41 и 42.приводов 43 и 44, также закрепленных на
раме 18. К обойме 31 шарнирно прикреплены на кронштейне 45 опорные ролики 46 и 47, а на кронштейне 48 - боковой упор 49.
В полости траверсы 2 размещена рейка 50, а на катках 51 установлены каретки 52«,Катки 51 соединены осями 53, на которьк установлены подпружи- ненные пружинами 54. корпуса 55..На корпусах 55 закреплены приводы 56 с шестернями 57, входящими в зацепление с рейкой 50. К каждому корпусу 55 сни снизу шарнирно прикреплен упор 58 для петель 59 изделия 6Q.
На верхней части каждого корпуса 55 укреплен гидротолкатель 61, на штоке 62 которого шарнирно . укреплена подсружиненная тяга 63. К тяге 63 шарнирно (штырь и прорезь) прикреплен рычаг 64, также шарнирно соединенный с корпусом 55 каретки 52. Рычаг 64 вьтолнен со штырем 65 для продольных петель 59 строительного изделия 60, направленным перпендикулярно траверсе.
К корпусу 55 каретки 52 шарнирно прикреплен кронштейн 66, примыкающий к рычагу 64 и расположенный к нему перпендикулярно. Кронштейн 66 выполнен со штырем 67 под поперечные петли 59 изделия 60, перпендикулярным штырю 65, и с пластиной 68, имеющей отверстие 69, соосное со штьфем 65 рычага 64.
К плоскости кронштейна 66 жестко прикреплена вилка 70 под головку стержня 71 изделий 60.
Предложенное устройство работает следующим образом.
Кран с грузозахватным устройством устанавливают над строительньм изделием 60.
Изделие может иметь продольные или поперечные петли 59 или стержни 71 с головкой.
В исходном положении гибкие связи наткнуты, упор 9 оси 6 опирается на внутренние выступы 4 стакана 3. Палец 8 находится в прорезях 7 в нижнем положении. Штоки гидротолкателей 61 подняты вместе с тягами 63 и рычагами 64. При этом рычаги 64 повернуты вокруг шарниров, а их штыри 65 вьшеде- ны из отверстий 69 пластин 68.
Производят предварительную наводку опорных роликов 46 и 47 на верхнюю грань изделия 60, Для этого включают
5
5
0
0
5
0
5
0
5
приводы 43 и 4Д, которые через шестерни 41 и 42 перемешают рейки 35 ;i 36 с обоймой 31. Обсйма 31 перемещается по ряду роликов 29 и вместе с ней пе- ремещаются опорные ролики 46 и 47, после чего приводы 43 и 44 выключают.
Включают привод грузовой тележки крана, и устройство на гибких связях опускается до соприкосновения роли- .ков 46 и 47 с верхней гранью изделия . 60, после чего приводы автоматически выключаются. При этом натяжение гибких связей ослабляется, они провисают, и устройство может повернуться. Поэтому гибкие связи автоматически выбираются. Это осуществляется следующим образом.
В момент провисания гибких связей пружина 5 упирается в дно стакана 3 и потянет последний вниз. Стакан, перемещаясь прорезями 7 по пальцу 8, перемещает и жестко связанную с ним несущую раму.1, при этом упор 9 оси 6 поднимается над внутренними выступами 4 стакана 3 (фиг. 6). Натяжение гибких связей восстанавливается.
Далее включают приводы 65 кареток 52, и они, обкатывая шестернями 57 рейки 50, перемещаются на катках 51 по траверсе 2, пока упоры 58 не BCTJI- нут напротив петель 59 или стержней 71. Приводы 56 выключают.
После опирания устройства на изделие 60 включают приводы 39 и 40, которые через шестерни 37 и 38 перемещают перпендикулярно траверсе 2 рейки 33 и 34 с обоймой 32 и боковым., упором 49 до упора последнего в боковую грань изделия 60. При дальнейшей работе приводов 39 и 40 начинает пе - ремещаться нижняя рама 18 по рядам роликов 30 в обойме 32 в противопог- ложную сторону.
Вместе с нижней рамой 18 перемещается все устройство, пока упоры 58 кареток 52 не упрутся в петли 59 или стержни 71.После этого приводы 39 и
40 автоматически выключаются. Таким
образом грузозахватное устройство, ориентируется в плане относительно подъемных петель.
Далее автоматически включаются приводы 56 кареток 52 и каждая каретка 52 перемещается по траверсе 2 до упора кронштейнов 66 в петли 59 или вилок 70 в стержни 71. После чего приводы 56 автоматически выключаются. Если петли 59 на изделиях поперечные,
то во время перемещения кареток 52 аггыри 67 входят в петли 59.
После этого автоматически выключаются приводы гндротолкателей 61, штоки которых, опускаясь, перемещают вниз рычаги 64, поворачивая их вокру шарнира. Ирк этом штырк: 65 рычагов 64 входят и отверстия 69 пластины 68 запирая тем самым грузозахватные органы.
Если изделие 60 вьтс лнено с продольным расположением петель 59, то после наезда каретки 52 и упора Кронштейнов 66 и петли, штыри 67 расположатся параллельно петлям. После включения гидротол1:ателей 61 шты ри 65 рычагов 64 входягг в петли 59 и запирают грузозахватны(; органы.
Если изделие вьшолн(шо со стержнями 71, то при наезде кареток 52 кронштейны 66 упираютсл в стержни |Вилками 70.
После получения сигналов, что все захватные органы-заперты, автоматически включается привод грузовой тележки крана, обеспечив.ающий подъем изделия.
Равномерная перел;ача усилий от веса издедия 60 на траверсу 2.при погрешности расположения петель 59 по высоте и в плане обеспечивается пружинами 54 ка корпусах 55 кареток 52 и шарнирным креплением кронштейнов 66 и рычагов 64, с помощью которых осуществляется независимое перемещение каждого захватногоч-рргана под верхнюю часть соответствующей петли или головку штыря при подъеме изделия. При подъеме изделия также обеспечивается соосность подвеса устройства и центра тяжести изделия при произвольном расположе;Нни петель за счет рычажного соединения верхней 13 и нижней 18 рам.
При нарушении соосности траверса 2 вместе с нижней 18 поворачивается в вертикальной плоскости на некоторьй угол, наклоняя тяги 19, которые, нажимая на соответствующий конечный выключатель, автоматически включают приводы 23 и 24 реек 21 и 22. Последние двигаясь вместе с траверсой 2 по каткам 20,, перемещают ее в нужную сторону, nocoie установки траверсы с нижней рамой в горизонтальное положение 5 а тяг 19 - в вертикальное, приводы 23 и 24 автоматически выключаются.
В случае необходимости поворота траверсы 2 в горизонтальной плоскости включают приводы 14 и 15. Шестерни 16 и 17, обкатьюая зубчатое колесо
12,поворачивают ось 6 вместе с рамой
10 Изобретение обеспечивает пространственную ориентацию устройства, поэтому может быть использовано для подъема и транспортирования изделий различной толщины при смещении петель
15 относительно друг друга по высоте и в горизонтальной плоскости, а также для изделий с поперечными или продольными петлями. ;
20
Формула изобретения
с ней узлом подвески полуто траверсу, установленные в полости последней каретки с захватными органами и приспособление для наводки последних, о т- личающееся тем, что, с целью расширения эксплуатационных возможностей путем обеспечения пространственной ориентации траверсы относительно груза с различным расположением грузоподьемных приспособлений,
узел подвески включает в себя установленную с возможностью поворота на несущей раме и подпружиненную относительно Нее.верхнюю П-образную раму и закрепленную на траверсе нижнюю П-образную раму, полки которой соединены с полками верхней П-образной рамы посредством шарнирных тяг, закрепленные на нижней П-образной раме приводы с шестернями, поперечины с направляющими катками для траверсы и зубчатые рейки, закрепленные на траверсе с возможностью взаимодействия с шестернями приводов, при этом корпуса кареток подпружинены относительно траверсы и снабжены приводами перемещения захватных органов относительно кареток и упорами для строповочных элементов груза, а приспособление для наводки захватных органов представляет собой установленные на нижней П- образной раме перпендикулярно траверсе приводные обоймы с шарнирно закре- Ш1енными к ним опорными элементами и боковыми упорами.
52
гжж
л.:/
г т1
tP ui. л
„
.
418268
ленного к нему и к корпусу каретки рычаг с захватным штырем и закрепленный на корпусе каретки кронштейн с захватной вилкой для стержня с головкой и дополнительным захватным штырем, расположенным перпендикулярно основному.
«7
fpa2.2
59
J
60
х
7/
ФигЛ
23 йадВ
W- .
.---игз Its „„ W
Э
иг.5
ЦО
21
18
Фиг. 7
г-г
61
9ti2.8
JLS
56
+
-f
7 fO
(Риг. 9
66
70
60
55
Фиг. Iff
| Авторское свидетельство СССР № 755744, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
