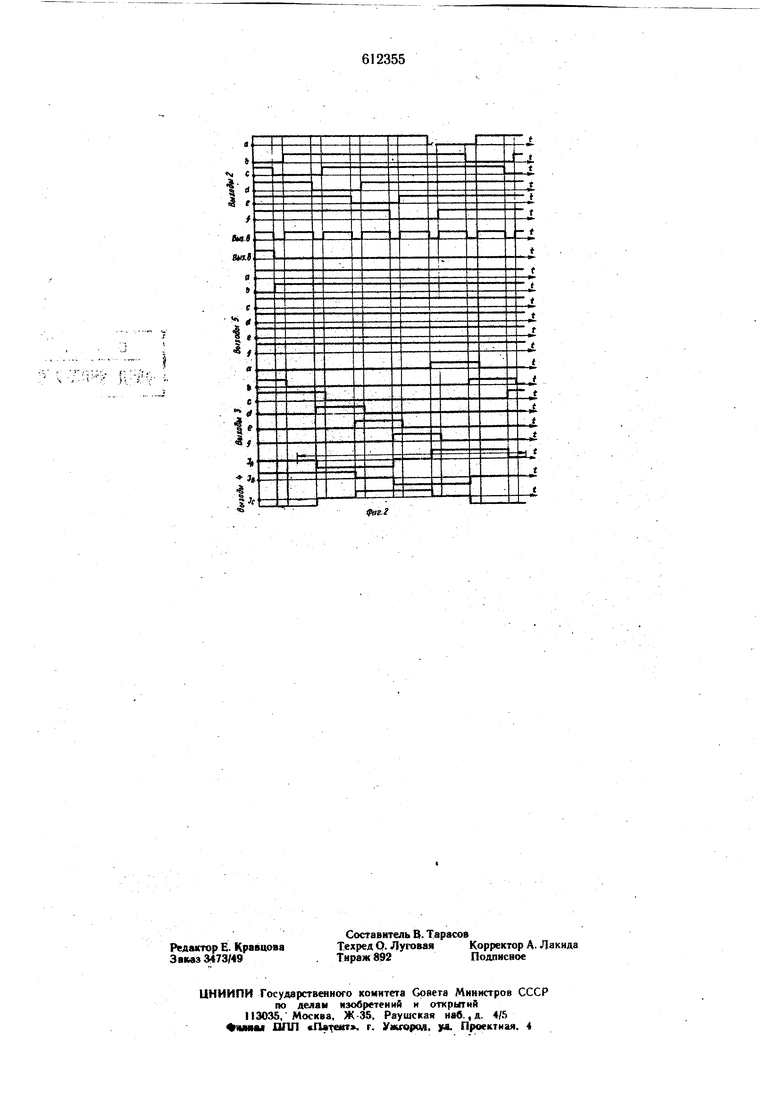
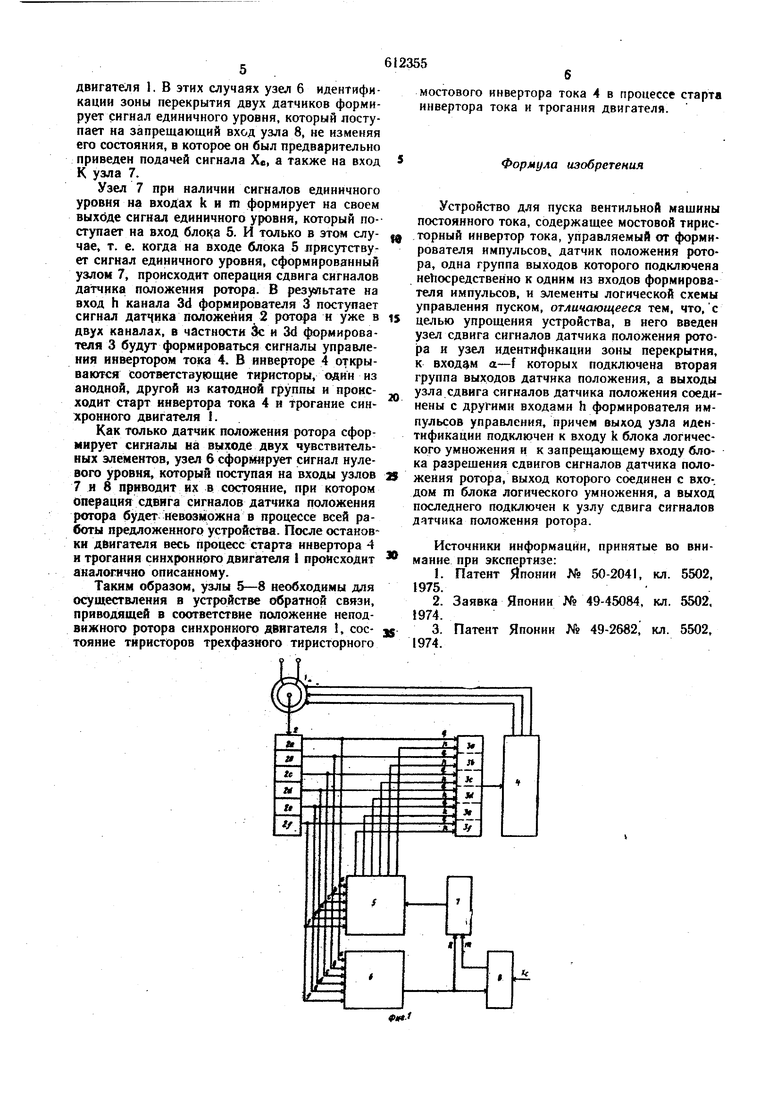
(54) УСТРОЙСТВО ДЛЯ ПУСКА ВЕНТИЛЬНОЙ МАШИНЫ ПОСТОЯННОГО ТОКА рое содержит синхронный двигатель, снабженный узлом для определения положения ротора, инвертор на тиристорах, собранный по мостовой трехфазной схеме, управляемый выпрямитель, выполненный на тиристорах по мостовой схеме, генератор сигналов переключення тнрнсторов в ннверторе, шесть переключательных схем, предназначенных для формнрования сигналов отпирания и запирания основных тиристоров. Генератор сигналов переключения, унравляемый устройством определения положания ротора, выдает последовательно во времени серню импульсов, необходимых для включения тиристоров в переключательных схемах, которые предназначены для формирования сигналов .отпирания тнрнсторов инвертора 3. Однако троганне двигателя необходимо производить от постороннего запускающего устройства, обеспечивающего старт инвертора тока, что усложняет привод. Целью изобретения является упрощение устройства, осуществляющего пуск вентильной мащины. Это достигается тем, что в предложенном устройстве для пуска вентильной машины постоянного тока, содержащее мостовой тиристорный инвертор, тока, управляемый от формирователя импульсов, датчик, положения ротора, одна группа выходов которого подключена непосредственно к одним на входов формирователя импульсов, и элементы логической схемы управления пуском, введен узел сдвига сигналов датчика положения ротора и узел идентифнкацни зоны перекрытия, к входам о.-f которых подключена в11орая группа выходов датчика положения, и выходы узла сдвига сигналов датчика положения соединены с другими входами h формирователя импульсов управле-. ния, причем выход узла идентификации подключей к входу k блока логического умножения и к запрещающему входу блока разрешения сдвигов сигналов датчика положения ротора, выход которого соединен с входом m блока логического умножения, а выход последнего подключен к узлу сдвига сигналов датчика положения ротора. На фиг. I представлена структурная схема предложенного устройства для пуска вентиль«ой машины постоянного тока; на фиг. 2 - временные диаграммы выходных величин. На валу вентильной машины (синхронного двигателя) 1 установлен датчик положения 2, одна группа ;выходов которого соединена с формирователем нмпульсов 3, подключенным к мостовому инвертору тока 4. Выходы инвертора . тока 4 включены на фазы статора вентильной машины t. Втораягруппа ВЫХОДОЁ датчика положения { /соединена с входами а-f узла 5 сдвигов сигналов датчика положения ротора и узла 6 идентификации зоны перекрытия. Выход узла 6 со1едннен с входом k блока (узла) логи еского умноження 7 и с запрещающим входом блока (узла) 8 разрешения сдвигов сигналов датчика положения ротора. Выход блока 8 соединен с входом m блока 7, выход которого подключен к узлу 5. На разрешающий вход блока 8 разрешения сдвига сигналов датчика положения ротора перед троганием синхронной машины 1 подается команда Хв, в результате чего на выходе блока 8 разрешения сдвига сигналов датчика положения ротора формируется сигнал единичного уровня, поступающий на вход ш блока логического умножения 7. Датчик положения 2 ротора синхронного двигателя 1, представляющий собой круглую полую обойму с расположенными по периметру шестью чувствительными элементамн 2о-2f внутри которой расположен сигнальный сектор, выполнен таким образом, что в неподвижном состоянии он может формировать сигналы на выходе одного или двух соседннх чувствительных элементов. В предложенном устройстве старт инвер тора тока 4 и трогание синхронного двигателя 1 осуществляются после подачи напряжения на инвертор тока 4 при условии, если открыты два тиристора инвертора тока 4 - один в анодной, другой в катодной группе. Таким образом, если Положение неподвижного ротора двигателя характеризуется наличием сигналов на выходе двух чувствительных элементов датчика положения 2 ротора, например 2в и 2с, старт инвертора тока 4 и трогаиие синхронного двигателя 1 происходят следующим образом. Сигналы датчика положения 2 ротора с выходов чувствительных элементов 26 и 2с поступают на входы j каналов Зв и 3с формирователя 3 импульсов управления. С других входов этих -же чувствительных элементов 2в и 2с датчика 2 положения ротора также поступают сигналы на входы вис узла 6 иденшфикации зоиы перекрытия двух дatчикoв, который формирует сигнал нулевого уровня, поступающий на вход к блока логического умножения 7 и запрещающий вход блока 8 разрешения сдвига сигналов датчика положения ротора. В результате блоки 5, 7, 8 не работают, и операции сдвига сигналов датчика положения ротора не происходит. Сформированные сигналы управления с выходов каналов Зв н 3с формирователя 3 импульсов управления Поступают на соответствующие тирнсторы инвертору тока 4, один нз которых находится в анодной, другой - в катодной группах инвертора. В результате по фазам синхронного двигателя 1 протекает ток, создающий магнитное поле, которое обуславливает рращающий момент на валу двигателя. Следующие после старта инвертора тока 4 и трогания синхронного двигателя 1 режимы работы устройства управления вентильной машины постоянного тока осуществляются по известным алгорнтмам. Возможны сл чаи, когда положение неподвижного ротора синхронного двигателя I, характеризуется наличием сигнала на выходе од ного нз шести чувствительных элементов датчика положения ротора, например 2с. В этом случае открывается только один тиристор инвертора токао4 из анодной или катодной группы, чего недостаточно для осуществления старта инвертора тока 4 и трогания синхронного
двигателя 1. В этих случаях узел 6 идентификации зоны перекрытия двух датчиков формирует сигнал единичного уровня, который лоступает на запрещающий вход узла 8, не изменяя его состояния, в которое он был предварительно приведен подачей сигнала Хв, а также на вход К узла 7.
Узел 7 при наличии сигналов единичного уровня на входах k и m формирует на своем выходе сигнал единичного уровня, который по-ступает на вход блока 5. И только в этом случае, т. е. когда на входе блока 5 лрисутствуег сигнал едииичиого уровня, сформированный узлом 7, происходит операция сдвига сигналов датчика положения ротора. В результате на вход h каиала 3d формирователя 3 поступает сигнал датчика положейия 2 ротора и уже в двух каналах, в частности и 3d формирователя 3 будут формироваться сигналы управления инвертором тока 4. В инверторе 4 открываются соответствующие тиристоры, один из аиодиой, другой из катодной группы и происходит старт инвертора тока 4 и Трогание синхронного двигателя I.
Как только датчик положения ротора сформирует сигналы на выходе двух чувствительных элементов, узел 6 сформирует сигнал нулевого уровня, который поступая на входы узлов 7 и 8 приводит их в состояние, при котором операция сдвига сигналов датчика положения ротора будет невозможна в процессе всей работы предложенного устройства. После остановки двигателя весь процесс старта инвертора 4 и трогаиия синхронного двигателя I происходит аналогично описанному.
Таким образом, узлы 5-8 необходимы для осуществления в устройстве обратной связи, приводящей в соответствие положение неподвижного ротора синхронного двигателя I, состояние тиристоров трехфазного тиристорного
МОСТОВОГО инвертора тока 4 в процессе старта инвертора тока и трогания двигателя.
Формула изобретения
Устройство для пуска вентильной машины постоянного тока, содержащее мостовой тиристорный инвертор тока, управляемый от формирователя импульсов датчик положения ротора, одна группа выходов которого подключена нейосредственно к одним из входов формирователя импульсов, и элементы логической схемы управления пуском, отличающееся тем, что,с целью упрощения устройства, в него введен узел сдвига сигналов датчика положения ротора и узел идентификации зоны перекрытия, к входам а.-f которых подключена вторая группа выходов датчика положения, а выходы узла сдвига сигналов датчика положения соединены с другими входами h формирователя импульсов управления, причем выход узла идентификации подключен к входу k блока логического умножения и к запрещающему входу блока разрешения сдвигов сигналов датчика положения ротора, выход которого соединеи с вхо-. дом m блока логического умножения, а выход последнего подключен к узлу сдвига сигналов датчика положения ротора.
Источники информации, принятые во внимание при экспертизе:
1.Патент Японии № 50-2041, кл. 5502, 1975.
2.Заявка Японии № 49-45084, кл. 5502. 1974.
3.Патент Японии № 49-2682, кл. 5502, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для пуска вентильной машины постоянного тока | 1980 |
|
SU951611A1 |
| Устройство для пуска вентильной машины постоянного тока | 1981 |
|
SU1003287A1 |
| Устройство для пуска вентильной машины постоянного тока | 1978 |
|
SU718875A2 |
| Устройство для пуска вентильного электродвигателя с зависимым инвертором | 1981 |
|
SU997219A1 |
| Устройство для управления вентильнымэлЕКТРОпРиВОдОМ | 1979 |
|
SU822312A1 |
| Вентильный электродвигатель | 1976 |
|
SU649105A1 |
| Устройство для пуска синхронной @ -фазной машины | 1990 |
|
SU1823119A1 |
| Асинхронно-вентильный каскад | 1987 |
|
SU1529395A1 |
| Высоковольтный вентильный электродвигатель | 1985 |
|
SU1309239A1 |
| Устройство для пуска синхронной машины | 1983 |
|
SU1131002A1 |