1
Изобретение относится к электротехнике и предназначено для использования в вентильном :электроприводе.
Известно устройство, которое содержит синхронный двигатель, снабженный узлом для определения положения ротора, инвертор на тиристорах, собранный по мостовой трехфазной схеме, управляемый вьшрямитель, вьшолненный на тиристорах по мостовой схеме, генератор сигналов переключения тиристоров в инверторе, шесть переключательных схем, предназначенных для формирования сигналов отпирания и запирания основных тиристоров.Генератор сигналов переключения, управляемый узлом определения положен1ш ротора, выдает последовательно во времени серию импульсов, необходимых для включения тиристоров в переключательных схемах, которые предназначены для формирования сигналов отпирания тиристоров инвертора Г 1J
. Однако трогание двигателя необходимо производить от постороннего запускающего устройства, обеспечивающего старг инвертора тока, что усложняет привод.
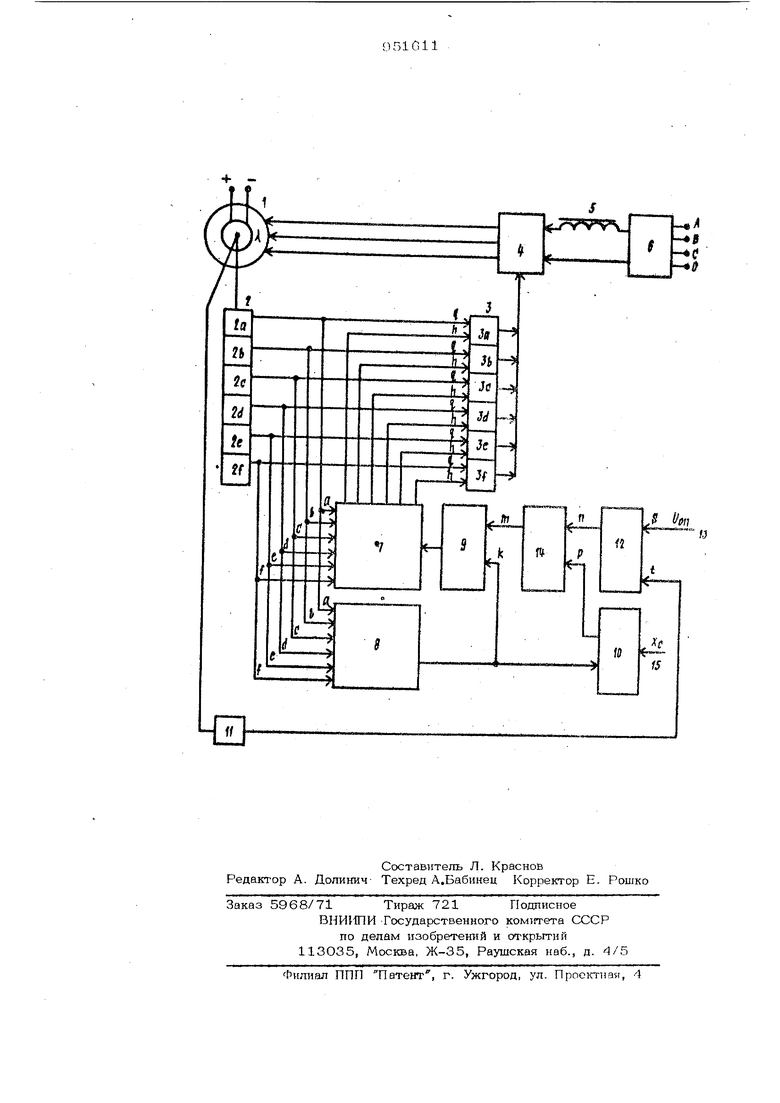
Наиболее близга1м к изобретению по технической сущности является устройство для пуска вентильной машины постоянного тока, содержащее вентильную машину (синхронный двигатель) датчик положения ротора, формирователь импульсов управления, мостовой инвертор тока, узел сдвига сигналов положения ротора, узел идентификации зоны перекрытия, блок логического ул-шожения и блок разрешения сдвига сигналов датчика положения ротора, для осуществления первоначального пуска вентильной машины одна группа выходов датчика положения ротора, установленного на валу синхронного двигателя, подключена непосредственно к одним из входов формирователя импульсов, под1шюченного к мостовому инвертору тока. Выходы инвертора тока подклкя1ены к фа зам статора вентильной машины. Г торая группа выходов датчика положения рото ра соединена с соответствующими входами узла сдвига сигналов датчика положения ротора и узла идентификации зоны перекрытия. Выход узла идентификации зоны перекрытия соединен с первым входом узла логического умт ожения и с запрещающим входом блока разрешения сдвига сигналов датчика положения ротора. Выход блока разрешения сдвига сигйалоТз датчика положения ротора соединен со вторым входом блока логического умножения, выход которого подключен к узлу сдвига сигналов датчика положения .ротора . При пи1ании вентильной машины, соде жащей инвертор тока с естественной ком мутацией тока в вентилях, от управляемо го вьшрямителя при наличии на ее валу постоя1даого момента (М-.), пуск .и выход на установившийся рабочий режи .невозможен. Это обуславливается тем, что в пусковом режиме противо-ЭДС вентильной машинь пропорциональная ско рости вращения .изменяется от минимально.го значения до номинального (при установивщемся рабочем режиме), а также особенностью работы инвертора тока и управляемого вьшрямителя, характеризующейся режимом прерывистого тока. В результате этого, после первоначального рывка, обусловленного работой узла сдви га сигналов датчика положения ротора, узла идентификации зоны перекрытия и узла разрешения сдвига сигналов датчика положения ротора, вентильная машина останавливается, так как величина вращ ющего момента меньше величины мо мента MQ , а также нарушается условие устойчивой работы инвертора тока с естественной коммутацией. Целью изобретения является повышени надежности пуска вентильной машины. Цель дости.гается тем, что, в устройство введены допоянит(пьный элемент ИЛИ, узел сравнения, задатчик опорного напряжения, датчик противо-ЭДС вентильной машины, выход которого соединен с первым входом узла сравнения, другой вход которого соединен с задат ком опорного напряжения, а выход г узла сравнения соединен с одним из входов логического элемента ИЛИ, другой вход которого соединен с выходом блока разрешения сдвига сигналов датчика положения ротора, а выход соединен со вторым входом блока логического умножения, На чертеже представлена структурная схема устройства для пуска вентильной машины постоянного тока. На валу вентильной машины (синхронного двигателя) 1 установлен датчик 2 положения ротора, одна группа выходов - i которого соединена с формирователем 3 импульсов управления, подключенным к мостовому инвертору 4 тока. Входы инвертора 4 тока через сглаживающий дроссель 5 соединены с выходами управляемого вьшрямителя 6, подключенного к трехфазной сети, а выходы инвертора 4 гока соединены с фазами статора вентильной машины 1. Вторая группа выходов а i датчика 2 положения ротора соединена с входами узла 7 сдвига сигналов датчика положения ротора и узла 8 идентификации зоны перекрытия. Выход узла 8 идентификации зоны перекрытия соединен с первым входом k Э логического умножения и с запрещающим входом блока Ю разрешения сдвигов сигналов датчика положения ротора. Синхронный двигатель снабжён датчиком 11 противо-ЭДС, вькод которого соединен с первым входом t узла 12 сравнения, другой вход 5 которого соединен с выходом 13 задатчика опорного напряжения UQP выход узла 12 сравнения соединен с первым входом Ц логического элемента ИЛИ 14, второй вход Р которого соединен с выходом узла Ю разрешения сдвига сигналов датчика положения ротора и выход логического элемента ИЛИ 14 соединен со вторым входом Vn блока ло.гического умножения, выход которого соединен с входом узла 7 сдБИГов сигналов датчика положения рот-ора, выходы которого соединены с формирователем 3 импульсов. На разрешающий вход 15 блока 10 разрешения сдвига сигналов датчика положения ротора перед троганием синхронной машины 1 подается команда Хст в результате чего на выходе блока 10 разрешения сдви.га сигналов датчика поло.жения ротора формируется сигнал единичного уровня, прступакяхсий на вход Р логического элемента ИЛИ 14. Старт инвертора 4 и трогание синхронной машины 1 осуществляется после подачи напряжения на инвертор 4 при условии, если открыты два тиристора инвертора 4 один в анодной, другой в катодной группе. Таким образом, если положение неподвижного ротора двигателя ха5
рактеризуется наличием сигналов на выходе двух чухютвительных элементов датчика 2 положения ротора, например 2 и 2с, старт инвертора 4 и трогание синхронной машины 1 происходит следующим образом.
Сигналы датчика 2 положения ротора с выходов 2в и 2с поступают на входы каналов 3 и Зсформирователя 3 импульсов управления. С других вьгходов этих же чувствительных элементов 2 и 2с датчика 2 положения ротора также поступают сигналы на входы и С узла 8 идентификации зоны перекрытия двух датчиков, который формирует сигнал нулевого уровня, поступающий на вход К блока логического умножения 9 и запрещающий вход блока 10 разрещения сдвига сигналов датчика положения ротора. В результате блоки 7, 9, 10 не работают. Сформированные сигналы управлещш с выходов каналов Зб и ЗС формирователя 3 импульсов управления поступают на соответствующие тиристоры инвертора 4, один из которых находится в анодной, другой в катодной группах инвертора. В результате по фазам синхронного двигателя 1 протекает ток, создающий мапштное поле, которое обуславливает вращающий момент на валу двигателя в начальный момент работы.
Возможны случаи, когда положение неподвижного ротора синхронной мащины 1 характеризуется наличием сигнала на выходе одного из щести чувствительных элементов датчика положения ротора, например 2с. В этом случае открывается только один, тиристор инвертора 4 из анодной или катодной группы, чего недостаточно для осуществления старта инвертора 4 и трогания синхронного двигателя 1.
В этих случаях узел 8 идентификации зонь перекрытия двух датчиков формирует сигнал единичного уровня, который поступает нь запрещающий вход узла 10 не изменяя его состояния, в которое он был предварительно приведен подачей сисигнала XQ, а также на вход К узла 9. Узел 9 при наличии сигнала единичного уровня на входах К и vn формирует на своем выходе сигнал единичного уровня, который поступает на вход блока 7. . И только в этом случае происходит опе раш1я сдвига сигналов датчика положения ротора. В результате на вход Vi канала 3d формирователя 3 поступает сигнал датшка 2 положения ротора и уже в дву каналах, в частности ЗС и 3d формиро116
вателя 3 формируют сигналы управления инвертора 4. В инверторе 4 открываются соответствующие тиристоры один из анодной, другой из катодной группы, и происходит старт инвертора 4 и трогание синхронного двигателя 1. Как только датчик 2 положения ротора сфор гарует сигналы на выходе двух чувствительных элементов, узел 8 сформирует сигнал нулевого
уровня. В процессе пуска вентильтюй мащины и выхода ее на установивщийся рабочий режим напряжение на выходе датчика 11 противо-ЭДС, пропорциональное величине противо-ЭДС, изменяется,
возрастая от нуля до установивщегося значения. Это напряжение поступает в узел 12 и сравнивается с опорным напряжением, пропорциональным напряжению питания установки. В процессе пуска напряжение датчика 11 противо-ЭДС меньще величины опорного напряжения и узел 12 сравнения формирует на своем выходе сигнал единичного уровня, который, проходя через логический элемент ИЛИ
14, поступает на вход блока логического умножения 9. За счет этого в моменты времени, когда узел иденгификации. зоны перекрьти 8 формирует на своем выходе сигнал едигшчного уровня, срабатывает узел 7 сдвига сигнала датчика положения ротора и на выходы формирователя импульсов управления 3 кроме сигналов управления, псх тупаюших от чувствительных элементов датчика положения ротора 2,поступают сигналы управления, сформированные узлом 7 сдвига сигналов положения ротора, сдвинутые по отнощению к сигналам датчика положения ротора 2 на 60 эл.град.
Вследствие этого формирователь импульсов управления 3 формирует импульсы управления длительностью 120 эл.град. и отпирание очередных тиристоров инвертора происходит с опережеьшем по отнощению к точке в которой ЭДС коммутирующих фаз ве1ггильного двигателя равны между собой на угол опережения, равный 30 эл. град.
Таким образом, длительность открытого состояния тиристоров инвертора тока в режиме прерывистого тока достаточна, чтобы . созданный синхронным двигателем 1 был больще Aif., а опережения отпирания тиристоров инвертора 4, равный 60 эл.град, обеспечивает устойчивую работу инвертора 4, в режиме пуска. В момент времени, когда напряжение на выходе датчика 11 противо-ЭДС
/ ,
равно по величине напряжению задатчи/ка опорного напряжения, узел 12 сравне ния сформирует сигнал нулевого уровня, который поступает через логический элемент ИЛИ 14 на вход уЦблока 9 логического умножения, вследствие чего происходит отключение узлов 7-14 от формирователя 3 импутпьсов управления, и в установившемся режиме длv тeльнocть управляющих импульсов определяется работой датчика 2 положения ротора. После остановки двигате;ю весь процесс старта инвертора 4 и пуск синхронного двигателя 1 с выходом на установившейся режим происходит аналогично описанному;
Введение дополнительного датчика 11 про1иво-ЭДС венти,11ьной машины, узла 12 сравнения, логического элемента ИЛИ . 14 и образование определенных связей между ,ними и другими узлами схемы позволяет обеспечить работоспособность вентильной машины 1 и высокую надежность функционирования инвертора 4 тока с естественной коммутацией при питании от управляемого вьшрямителя б в пусковом режиме при наличии постоянного момента на валу вет ильной машины 1.
Формула изобретения
Устройство для пуска вентильной машины постоянного тока, содержашее мос10118
ТОБОЙ тиристорный инвертор тока, управляемый от формт1ропателя импульсов, датчик положения ротора, одна группа выходов которого подключена к одним из 5 входов формирователя импульсов, а другая - к соответствуюшим входам узла сдвига сигналов датчика положения ротора и узла щент1фикнции зоны перекрытия, выход которого соединен с запре10 щаюшим входом блока разрешения и первым входом блока логического умножения, выход которого подключен к узлу сдвига сигналов, соединенному с другими входами формирователя импульсов, о т ts личающееся тем, что, с целью повышения надежности пуска вентильной машины, в него введены логический элемент ИЛИ, узел сравне шя, задатчик опорного напряжения, датчик противо-ЭДС
20 ве1нтильной машины, подключенный к первому входу узла сравнения, второй вход которого соединен с задатчиком опорного напряжения, а выход - с первым входом логического элемента ИЛИ, подклю25 чанного вторым входом к выходу блока разрешения, а выходом - ко второму Входу блока умножения.
Источники информации, принятые во внимание при экспертизе
301. Патент Японии № 49-2682,
-кл. 5502, 1974.
2. Авторское свидетельство СССР № 612355, кл, Н 02 К 29/02, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для пуска вентильной машины постоянного тока | 1981 |
|
SU1003287A1 |
| Устройство для пуска вентильной машины постоянного тока | 1975 |
|
SU612355A1 |
| Устройство для пуска вентильной машины постоянного тока | 1978 |
|
SU718875A2 |
| Вентильный электродвигатель | 1976 |
|
SU649105A1 |
| Высоковольтный вентильный электродвигатель | 1985 |
|
SU1309239A1 |
| Способ управления вентильным электродвигателем со звеном постоянного тока при изменении знака его момента и устройство для его осуществления | 1983 |
|
SU1124408A1 |
| Вентильный электродвигатель | 1986 |
|
SU1390763A1 |
| Асинхронно-вентильный каскад | 1987 |
|
SU1529395A1 |
| Вентильный электродвигатель | 1981 |
|
SU970578A1 |
| Вентильный электродвигатель | 1984 |
|
SU1272413A2 |