(54) ПРИВОД ПРОТЕЗА РУКИ

| название | год | авторы | номер документа |
|---|---|---|---|
| Привод протеза руки | 1979 |
|
SU825064A1 |
| Механизм переключения передач для трансмиссии машин | 1959 |
|
SU125148A1 |
| ПРИВОД ДВИГАТЕЛЬНЫЙ МАЛОГАБАРИТНЫЙ | 2010 |
|
RU2423264C1 |
| ПРИВОД СТЕРЖНЯ АВАРИЙНОЙ ЗАЩИТЫ | 2013 |
|
RU2566299C2 |
| Привод локтевого механизма | 1974 |
|
SU510239A1 |
| ПРИВОД ДВИГАТЕЛЬНЫЙ МАЛОГАБАРИТНЫЙ | 2014 |
|
RU2551695C1 |
| Протез руки | 1974 |
|
SU506410A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| Протез бедра с внешним источником энергии | 1986 |
|
SU1389770A1 |
| УСТРОЙСТВО ДЛЯ БЕЗОСТАНОВОЧНОЙ ПОПЕРЕЧНОЙ РЕЗКИ ГОФРОКАРТОНА | 2004 |
|
RU2257282C1 |
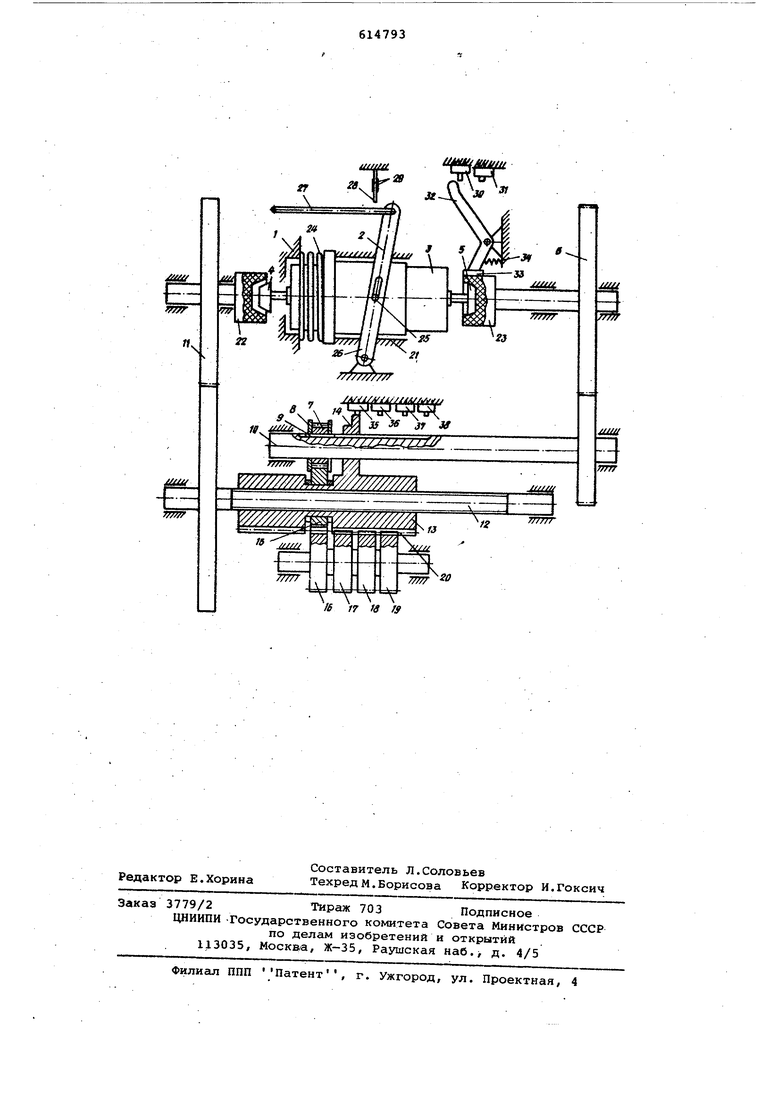
Изобретение относится к медицинекой технике, а именно к протезам вер них конечностей, приводимым в действие внешними источниками энергии. Известен привод протеза руки, содержащий корпус, электродвигатель,исполнительные механизмы с входными . шестернями и редуктором,, тягу и рычаг управления, систему микропереклю. чателей управления. Однако протез, снабженный этим приводом, выполняет только две функции и трее5ует значительных энергозатрат при пользовании, что снижает эффективность проте зирования. Целью изобретения является увеличение числа выполняемых протезом функ ций и снижение энергозатрат при поль зовании протезом. Поставленная цель достигается тем что в приводе установлен управляющий механизм с редуктором и винтовой пере дачей, гайка которой несет промежуточную шестерню, на выходе редуктора исполнительных механизмов на подвижной шпонке.размещена ведущая шестерня с буртиками, связанная с промежуточной шестерней управляющего механи ма, а электродвигатель установлен в корпусе подвижно, подпружинен, соеди ней с тягой управления через кулисный механизм и имеет два выходных конца, соединенных фрикционными муфтами со входами редукторов управляющего и исполнительных механизмов. Кроме того, редуктор исполнительных механизмов выполнен несамотормозящимся, зубья шестерен исполнительных механизмов размещены в продольных пазах гайки винтовой передачи управляющего механизма, а сама гайка имеет направляющий выступ, коитактирунщий с одним из микропереключателей управ ления. При этом рычаг управлейия выполнен двуплечим, установлен в корпусе подвижно, подпружинен и имеет на одном плече тормозную колодку, связан- ную с одной из фрикционных муфт. На чертеже изображеиа кииематичеркая схема привода протеза руки. Привод протеза руки состоит из корпуса 1, кулисы 2, на которой закреплен электродвигатель 3. с двумя выходными концами вала, снабженного фрикционными коническими полумуфтамч 4 и 5, двух редукторов. Несамотормо-t зящийся редуктор б исполнительного механизма имеет на выходе ведущую шестерню 7 с буртиками 8, на подвижной шпонке 9, размещенную на валу id. В редукторе 11 управляющего механизма на ходовом винте 12 установлена маточная гайка 13, имеющая направляк щий выступ 14. На поверхности гайки свободно поставлена промежуточная шестерня 15. Входные шестерни 16-19 исполнительных механизмов протеза находятся в зацеплении с промежуточной шестерней 15 и продольными пазами 20 на гайке 13, выполненными в форме зубьев гестерен исполнительных механизмов. Электродвигатель 3 с двумя выходными концами установлен в направляющих 21 корпуса 1 соосно с входными валами редукторов 6 и 11,снабженных фрикционнйВ и полумуфтами 22 и 23, и поджат пружиной 24 к редуктору 6, причем на обойме электродвигателя 3 имеется палец 25, входящий в паз кулисного механизма 26, на кулисе 2 которого закреплена тяга 27 управления. Против кулисы 2 в ..орпусе 1 установлена упругая балка 28 равного сопротивления с наклеенными на нее с двух сторон тензометрическими датчиками 29. Кроме того, в корпусе 1 имеется микропереключатель 30 прямого хода, микропереключатель.31 обратного хода, двуплечий рычаг 32 управления с тормозной колодкой 33, поджатой к полумуфте пружиной 34.
Против направлякадего выступа 14, гайки 13 установлены концевые микропереключатели 35, 36, 37, 38 в ПОЛО жениях, соответствующих положениям каждой входной шестерни 16, 17, 18, 19 исполнительных механизмов.
Привод работает следукхцим образом.
При натяжении и выборке тяги 27 , управления кулиса 2 передвигает электродвигатель 3 по направляющим 21 до соприкосновения полумуфт 4 и 22. В конце хода одновременно кулиса. 2 нажимает на упругую балку 28. Происходит включение электродвигателя 3. В зависимости от величины прогиба балки 28 с помощью датчиков 29 вырабатырается электрический сигнал, пропорциональный усилию на тяге 27, который подключает контакты одного из четырех концевых микропереключателей, наприi ep микропереключателя 36, в электрй ескую цепь управления электродвигат€ фем. Вращение вала электродвигателя 3 передается через редуктор И винту 12, который перемещает маточную гайify 13 поступательно вместе с промежуточной шестерней 15, Шестерня 15 в с1вою очередь перемещает шестерню 7 ре дуктора 6 за счет буртиков 8 по ;алу 10, таким образом осуществляется зацепление промежуточной шестерни 15 с входной шестерней 17 исполнительного механизма. Одновременно происходит зацепление шестерен 16, 18, 19 с продольными пазами 20 гайки 13. Одновременно направляющий выступ 14 маточной гайки 13 нажимает на кнопку концевого микропереключателя 36 и происходит отключение электродвигателя 3.
После этого производится расслабление тяги 27 управления и электродвигатель 3 поджимается с помощью пружины 24 полумуфтой 5 к полумуфте 2.3 При нажатии на рычаг 32 управления происходит отведение колодки 33 от поверхности полумуфты 23 и производится включение одного из микропереключателей, например микропереключателя 30 прямого хода. Включается электродвигатель 3, вращение вала которого с помощью муфты передается к редуктору 6, от него через шестерню 7 и промежуточную шестерню 15 на входную шестерню 17 одного из исполнительных ме ханизмов. Время воздействия на микрогпереключатель 30 соответствует времег ни работы исполнительного механизма. Для остановки исполнительного механизма производится опускание рычага 32. При Этом размыкаются контакты микропереключателя 30,колодка 33 прижимается к полумуфте 23 пружиной 4.Для осуществления обратного хода того же исполнительного механизма производится нажатие на рычаг 32, отводится колодка 33 и включается микропереключатель 31 обратного хода. При этом вал электродвигателя 3 начинает вращаться в противоположную сторону, изменяется направление вращения и на входной шес тернс 17 исполнительного механизма. Для остановки производится опускание рычага 32, включается микропереключатель 31, обесточивается электродвигатель 3. Колодка 33 поджимается к полумуфте 23. Для включения другого исполнительного механизма, например шестерни 19, производится выборка тяги 27 соответствующим подключению этого механизма усилием. При этом на датчике 29 вырабатывается сигнал,пропорциональный усилию на тяге, и в электрическую цепь двигателя подключаются контакты концевого микропереключателя 38, соответствующего выбранному исполнительному механизму. Одно-временно происходит соединение полумуфт 4 и 22 и включение электродвигателя. Вращение вала-двигателя передается через зубчатую передачу к винту 12, который перемещает маточную гайку 13 поступательно вместе с шестер)ней 7 за счет буртиков 8 по валу 10 редуктора 6. Промежуточная шестерня 15 входит в зацепление с входной шec терней 19 исполнительного механизма. Одновременно происходит зацепление шестерен 16, 17, 18 с продольными паза:да 20 к гайке 13. Направляющий выступ 14 маточной гайки 13 доходит до концевого микропереключателя 38,
происходит отключение электродвигателя 3.
Работа исполнительного механизма производится так же, как и в предыдь щем случае нажатием на рычаг 32 управления.
Привод имеет высокий коэффициент полезного действия, так как исполнительный редуктор предусмотрен несамотормозящимся. Количество функций исполнительных механизмов теоретически неограниченно.
Конструкция привода позволяет увеличивать количество активных функций, исполняемых одним двигателем,обеспечивает уменьшение энергозатрат при управлении протезом и уменьшение веса и габаритов привода,а также повышение КПД механических передач,используемых для исполнительных механизмов.
Формула изобретения
микропереключателей управления.
16 У7 W ГУ
ти
wm
fJt/U
го
