на пластинку 12 датчика, который измеряет силу натяжения тяги 6. При помощи сигнала датчика через усилитель напряжения питания электродвигателя 2 производится регулирование скорости вращения последнего. При расслаблении тяги 6 осуществляется отключение первого микропереключателя 9, обесточивание электродвигателя 2 ,и торможение его вала лентой И. Сгибание протеза в локтевом шарнире в противоположном направлении производится при воздействии рычага 8 на второй микропереключатель 9.
Формула изобретения
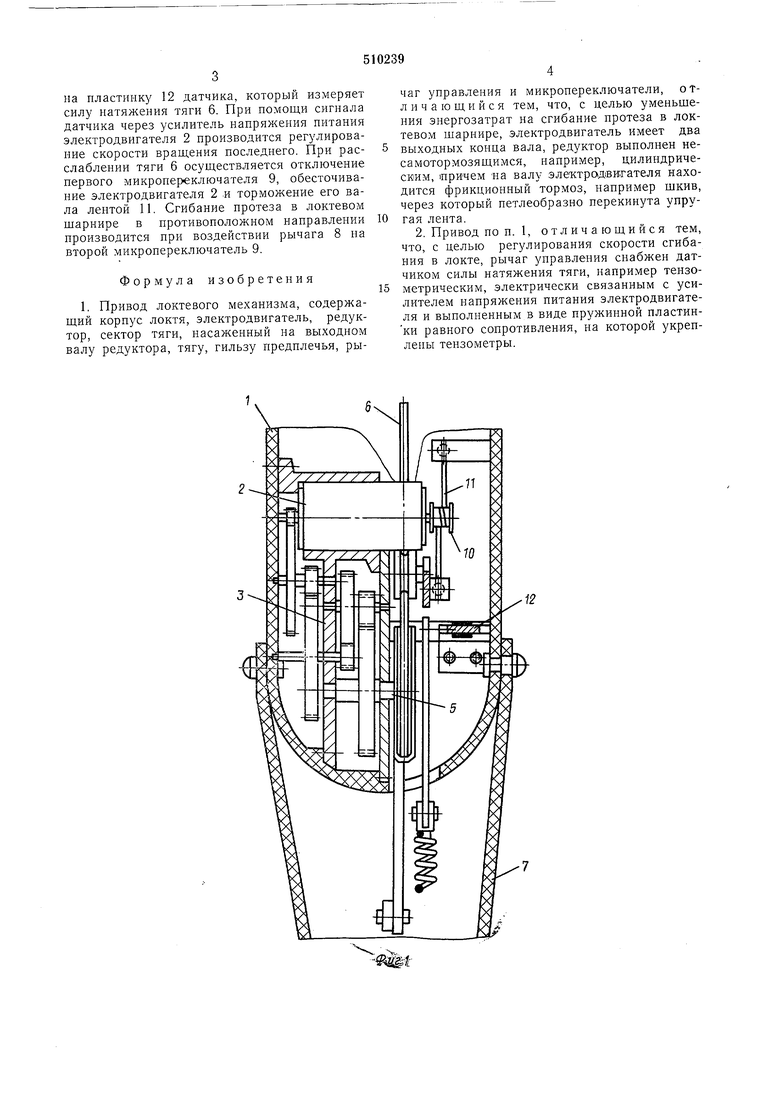
1. Привод локтевого механизма, содержащий корпус локтя, электродвигатель, редуктор, сектор тяги, насаженный на выходном валу редуктора, тягу, гильзу предплечья, рычаг управления и микропереключатели, отличающийся тем, что, с целью уменьщения энергозатрат на сгибание протеза в локтевом шарнире, электродвигатель имеет два выходных конца вала, редуктор выполнен несамотормозящимся, например, цилиндрическим, причем на валу электродвигателя находится фрикционный тормоз, например щкив, через который петлеобразно перекинута упругая лента.
2. Привод по п. 1, отличающийся тем, что, с целью регулирования скорости сгибания в локте, рычаг управления снабжен датчиком силы натяжения тяги, например тензометрическим, электрически связанным с усилителем напряжения питания электродвигателя и выполненным в виде пружинной пластинки равного сопротивления, на которой укреплены тензометры.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания механизмов протезов верхних конечностей | 1977 |
|
SU626776A1 |
| Протез плеча | 1989 |
|
SU1732967A1 |
| ПРОТЕЗ РУКИ С ПНЕВМАТИЧЕСКИМ ПРИВОДОМ | 1973 |
|
SU377158A1 |
| Электромеханический привод протезов конечностей | 1981 |
|
SU971312A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ ПЛЕЧА | 2019 |
|
RU2744605C2 |
| Протез плеча | 1989 |
|
SU1666104A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| Привод протеза руки | 1976 |
|
SU614793A1 |
| Многофункциональный активный протез руки | 1981 |
|
SU1009456A1 |
| Протез руки | 1974 |
|
SU506410A1 |

