(541 ИЗМЕРЕНИЯ РАДИУСОВ ПРИТУПЛЕНИЯ КРОМОК
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения радиусов притупления кромок деталей | 1985 |
|
SU1355855A1 |
| Устройство для контроля радиуса притупления режущей кромки | 1985 |
|
SU1298510A1 |
| Универсальный шаблон специалиста неразрушающего контроля | 2019 |
|
RU2714458C1 |
| Способ измерения радиусов притупления кромок | 1984 |
|
SU1224545A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЗАЗОРА МЕЖДУ ПОВЕРХНОСТЯМИ ИЗДЕЛИЯ | 1992 |
|
RU2049305C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАДИУСА ИЗДЕЛИЯ | 1991 |
|
RU2031351C1 |
| Радиусомер | 1986 |
|
SU1457542A1 |
| МНОГОГРАННАЯ ПЛАСТИНА ДЛЯ ТОЧЕНИЯ | 2014 |
|
RU2594301C2 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ НЕСООСНОСТИ | 1971 |
|
SU322596A1 |
| Способ определения радиусов кривизны сферических поверхностей и устройство для его осуществления | 1988 |
|
SU1562691A1 |
Изобретение, относится к измерятёяьиой техннве, а именно свособам .измерение paascyct еченвй етжтррлируемых ббьвктов.
Кав&сткы отособы коитрояя радиусов кромок аутем орямого иэмерення soopai нат точе атш с номошью поевшиной установочной влатформы и азмврвтвля л1шейШ91Х яеоем&швнкй ij.
Нбйостатком дтого способа является высокая трудоемкость в недостаточная точность, ПРИ иамербнги кромок с малым paisUiycoM пратуяяения.
Из8естш 1 способы изк«герен1ия радиусов притуппвнин кромок сечдннй контролируемых объектов с ломошью взмервтелей, снабженных В|жзмоб, чувствительным элементом, подвижным вдоль биссект рисы базовой t прнзшл, и преобразоват лем Перемещений, свяэашшм с чувствительным елементом, закл шюшнеся в том, что базовую призму я чувствительный зле мент приводят во взаимодействие с контролируемым объектом, после чего отмеч ют показания преобразователя перемещений;. Для обеспечения точности измерений, базовая првэма должна касаться контролируемого об ьекта обеими граням, что Достигается за счет подвижности. призмы 8 направления перпендикулярном к ее
биссектрисе 2.
Указанные способы обеспечивают вь сокую точность измерения в случае контроля цилиндрических объектов, когда угол ВРИ вершине призмы может быть сделан
9О я менее, что обеспечивает легкую самоустановку призмы. При контроле р ьднусов притупления кромок угол при вершине орнзмы должен быть больше угла при вершине кромки я в спучав контроля кромок с тупыми углбми
может доотигать 150
и более. При таких углах призмы тангенциальная составляющая Т нормальной силы Н , действуклдей со стороны кромки на првзму, равна/
0oL T N-cos.
При 01 близком к 180 , тангенциальная составляющая Т становится малой, что не гарантирует правильной самоуста25 новкн базовой призмы. Это становится
заметным при контроле кромок, распбложенных в труднодоступных местах, где нельзя визуально проконтролировать уело ВИЯ контакта базовой призмы с контролируемой кромкой.
С целью повышения точносгв измереНИН радиусов кромок с углами, особенно в труоноаоступных местах, взавмоде((стввв контролируемой кромки сначала осушествляк т по первой грани базовой призмы, затем перемещают базовую призму относительно кромки вдоль первой до контакта со второй гранью, а о результате измерения судят по экстремальным показаниям преобразователя.
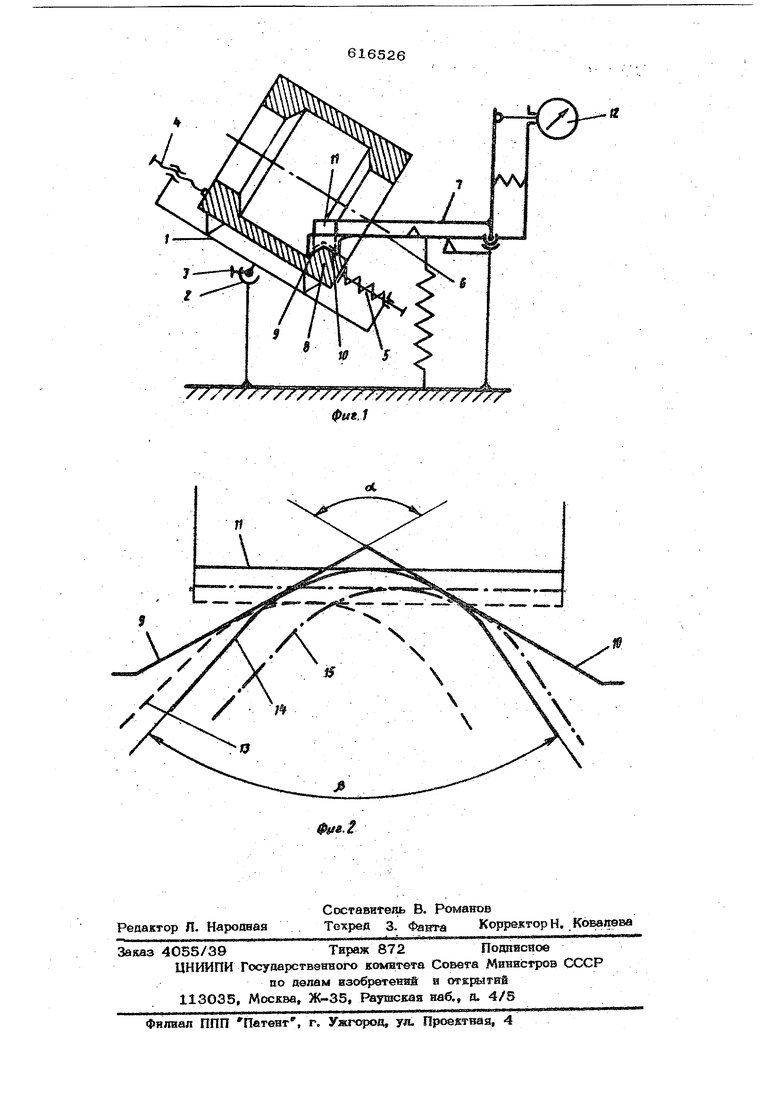
На фиг. 1 дана метрологическая схвма устройства, реализующего способ измерения радиуса притупления кромки; на фиг. 2 - схема взаимодействия кромке с базовой призмой и чувствительным элементом.:
Устройство для реализаиии способа содержит установочную платформу 1 с шарниром 2 и стопором шарнира 3, механизм перемещения контролируемого объекта, выполненный в виде микровинта 4 и возвратной пружины. 5, а также и мерительную часть в виде двух шарнирно закрепленных рычагов 6 и 7, из которых несет базовую поизму 8 с гранями 9 и 10 и углом X между ними, а второй - чувствительный элемент 11. Между свободными плечами рычагов установлен преобразователь перемещений 12..
Способ измерения радиуса притупления кромки заключается в следуюшем.
Сначала установочную платформу 1 устанавливают так, чтобы биссектриса угла между поверхностями, образующими контролируемую кромку 13j прибпизитель ио совпадала с биссектрисой угла| призмы и в этом положении стоторят установочную платформу.
На нее устанавливахтг контролируемый объект так, чтобы контролируемая кромка взаимодействовала с первой гранью 9 базирухядей призмы. Затем с помощью микровинта 4 перемешают контролируемы объект по установочной платформе так, чтобы коррелируемая кромка .приЬлижалась к вершш1е призмы, при этом следят за показанят га преобразователя переме шенвй 12.
Показания преобразователя будут экст ремальнымв (для устройства, и%)бражен- ного на фйр, 1, максимальными в тот
момент, когда контролируемая кромка будет касаться обеих граней п|жзмы7. На фиг. 2 это положение контролируемой кромки обо ачено позицией 14. Пря дальнейшем перемешении контролируемого объекта нарушается контакт кромки с первой гранью призмы, а показания преобразователя отклоняются от экстремальшлх (позиция ISj.
Для получения количественных характеристик радиуса притупления кромки устройство аттестуют по эталону, например цилиндрическому валику известного диаметра. Отклонение радиуса , кромки от настроечного связано с раэностью (Гц показаний преобразователя соотношением
1- sin
-dL 2
6in
-28.
Например, при
Ф о р м у л а и 3 о б р е т. е н и я
Способ измерения радиусов притупления кромок с помощью устройства, снабженного базовой призмой, чувствительным элементом, подвижным в направления биссектрисы базовой призмы, и преобр зователем перемещений, связанным с чувствительным элементом, заключающийся в том, что багэвую призму и чувствительный элемент приводят во взаимодействие с контролируемым объектом, после чего отмечают показания преобразовате ля переметений, о т лнч аюш и йс я тем, что, с целью повышения точности, измерений радиусов кромок с тупыми углами, взаимодействие контролируемой кромки сначала осуществляют по nefvвой грани базовой призмы, затем перемешают базовую призму относительна кромки вдоль первой грани до контакта со второй гранью, а о результате измерения судят по экстремальным показаниям преобразователя.
Источйики информации, принятые во внимание при экспертизе:
