(54) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления | 1979 |
|
SU780684A2 |
| Устройство для управления судовым турбоагрегатом с винтом регулируемого шага | 1984 |
|
SU1183418A1 |
| СИСТЕМА УПРАВЛЕНИЯ СУДОВЫМ ДВИГАТЕЛЕМ | 1994 |
|
RU2081786C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ГЛАВНОГО СУДОВОГО ДВИГАТЕЛЯ И ГРЕБНОГО ВИНТА РЕГУЛИРУЕМОГО ШАГА | 1991 |
|
RU2037181C1 |
| Система автоматического управления судовой турбинной установкой | 1982 |
|
SU1071530A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЭКОНОМИЧНОСТИ РАБОТЫ АВТОНОМНЫХ ЭНЕРГЕТИЧЕСКИХ УСТАНОВОК | 1997 |
|
RU2128830C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 1999 |
|
RU2147001C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 2000 |
|
RU2191106C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 1999 |
|
RU2147985C1 |
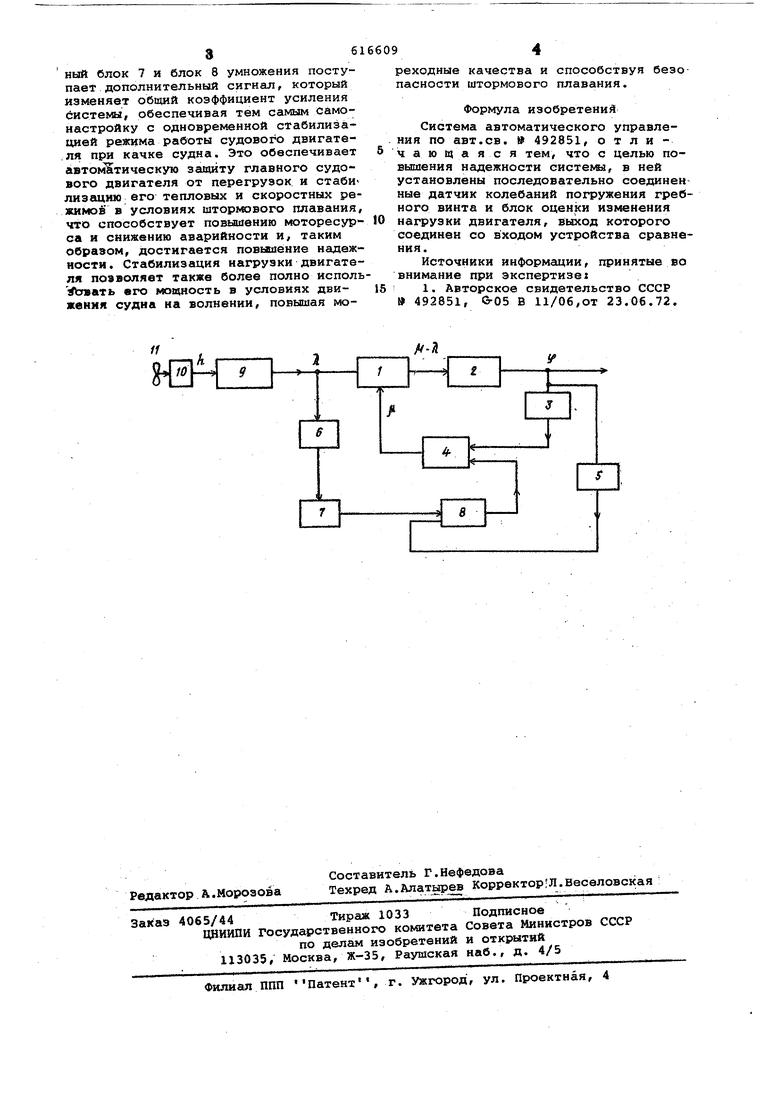
Изобретение относится к обла-сти .автоматического управления механизмами и устройствами,в частности к глав ным судовым двигателям в условиях /птормового плавания. в основном авт.св. № 492851 описана система автоматического управления, содержащая устройства сравнения выход которого соединен со входом объекта, выход через датчик рехулируе мого параметра соединен с первым входом сумматора и через последовательно соединенные первый усилитель к блок умножения - со вторым входом сумматора, выход которого соединен с одним из входов устройства сравнения другой вход которого через последовательно соединенные второй усилител и нелинейный элемент соединен со вторым входом блока умножения fl. Недостатком известной системы автоматического управления является его низкая надежность при управлении главным судовым двигателем в условиях штормового плавания. Цель изобретения - повышение надежности систе№л.. Это достигается тем, что в системе автоматического управления установленй последовательно соединенные. датчик колебаний погружения гребного винта и блок оценки изменения нагрузки двигателя, выход которого соединен со входом устройства сравнения. На чертеже представлена блок-схема системы. Система включает устройство 1 сравнения, объект 2 управления, датчик 3 регулируемой величины, сумматор 4, первый и второй усилители 5 и 6, нелинейный блок 7, блок 18 умножения, блок 9 оценки изменения на грузки двигателя, датчик 10 колебаний погружения гребного винта, гребной винт 11. Кроме того, на чертеже приняты следующие обозначения.А входной сигнал, ji -регулирующее устройство, if - регулируемая величина, К - глубина погружения винта. Система работает следуюадам образом. Полученный с выхода блока 8 оцен ки изменения нагрузки двигателя сигнал п характеризующий изменение погружения винта в воду, поступает на вход устройства 1 сравнений и второго усилителя б. При изменении входного сигнала Л по величине или по величине и по знаку на сумматор 4 через блоки б усилителя, нелиней
