I
Изобретение касается систем управления летательными аппаратами, металлорежущими станками и т.п..
Известна система оптимального уп-равления, содержащая блок сшггеза управляющего воздействия и моделирующий блок lj,f2 и .
Эти системы используются для опти1мального управления либо при отсутствии задающих воздействий, либо при их постоянном заданном уровне, что искгаочает возможность применения их при изменяющихся во времени входных воздействиях.
Наиболее близкой по технической супь ности к изобретению является система оптимального управления, содержащая задатчик, последовательно соединенные первый счетчик, к первому входу которого подключен генератор тактовых импуль сов, и дещифратор, выход которого соединен с первым входом блока управления моделью и первыми входами элементов 1, вторые входы которых соединены с соотБотствуюишми входами инвертора, -а
выходы - с соответствующими входами тригера, выход которого подключен ко входу объекта, выходы которого подключены, соответственно ко второму и третьему входам блока управления моделью, выходы которого соединены с соответствующими входами модели объекта 4J.
Однако эта система це обеспечивает требуемой точности при введении задающего воздействия.
Целью изобретения является повышение точности системы.
Для этого в системе установлены последовательно соединенные второй счетчик и блок перезаписи кода, и последовательно соединенные первый и второй функциональные преобразователи и релейный блок, выход которого соединен со входом инвертора и третьим входом модели объекта, выход дещифратора соединен со входом генератора тактовых импульсов, вторым входом блока перезаписи кода и первым входом второго счетчика, второй вход которого подключен ко второму входу первого счетчика, третий вход которого подключен к выходу блока перезаписи кода и входу эадатчика, выход которого соединен с первым входом первого функционального преобразователя, второй вход которого соединен с выходом модели объекта.
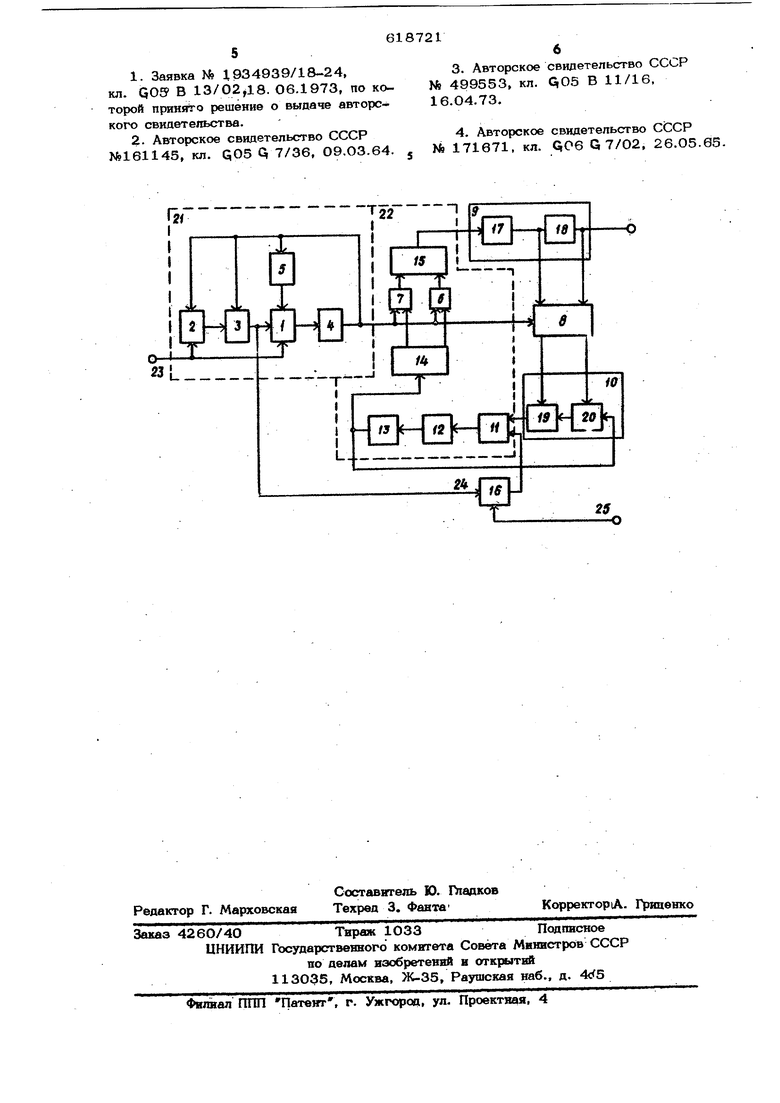
На чертеже изображена структурная схема системы.
Предложенная система содержит первый и второй счетчики 1,2, блок 3 перезаписи кода, дешифратор 4, генератор 5 тактовых импульсов, первый и второй элементы И 6,7/блок 8 управления . моделью, объект 9, модель объекта 10, первый и второй функциональные преобразователи 11,12, релейный блок 13, инвертор 14, триггер 15, задатчик 16, динамические звенья 17,18, вход5пцие в состав объекта, динамические звенья 19,20, входящие в состав модетш объекта, блок 21 формирования интервалов времеий, блок 22 формирования сигнала управления, вход записи кода 2,3, Система работает следующим образом.
В счетчик 2, работающий на вычитание от импульсов дешифратора 4, ко входу записи кода 23 заносится число, соответствукяцее длине фиксированного И1ггервала оптимизации (О,Т).
Одновременно это же число заносится в счетчик 1, работаюишй на вычитание от генератора 5 тактовых импульсов. Сигнал, появившийся на выходе дешифратора 4, фиксирует конец интервала времени работы модели объекта 10 и посредством блока 8 управления моделью устанавливает на динамических звеньях 19 и 20 модели начальные условия, соответствующие текущему состоянию объекта Sf, и нулевые начальные усповия-на функциональные преобразователи 11,12.
Одновременно с этим прекращается поступление тактовых импульсов от ге-; нератора 5 тактовых импульсов в счетчик 2, а блок 3 перезаписи кода пе-. РИВНОСИТ код счетчика 2 в счетчик 1.
Прсщесс решения повторяется на укороченном на один такт интервале времени. Функциональные преобразователи 11,12 представляют собой выполненные на операционных усилителях динамические звенья первого иорялка, структурно повторяющие объект 9.
Преобразователи 11,12 релейный блок 13 и инвертор 14 формируют сиг нал оптимального управления.
Оптимальные воздействия на объект 10 формируются посредством элементов
6,7 и триггера 15 в момент окончания очередного интервала работы быстрой модели , т.е. в момент появления сигнала на выходе дешифратора 4, и поддерживается таковым до окончания еле дующего за ним интервала решения.
Управляемый задатчик 16 многократно генерирует сигнал f ( ) на интервале решения модели на основании программы движения объекта f (-t) , записанной в задатчике по входу 24. При
этом от блока 3 перезаписи кода каждый раз в начале такта решения по входу 25 в задатчик 16 заносится длина интервала оптимизации, в результате чего
задатчик 16 формирует сигнал i С )
на укорачивающихся с левого края инте| валахСЬ,Т1 .
формула изобретения
Система оптимального управления, со держащая задатчик, поспедовательно соединенные первый счетчик, к первому входу которого подключен генератор тактовых импульсов, и дешифратор, выход
которого соединен с первым входом блока управления моделью и первыми входами элементов И, вторые входы которых соединены с соответствую1аими входами инвертора, а выходы V с соответствующими входами триггера, выход которого подключен ко входу объекта, к 1ходы которого подключены, соответствен . но ко второму и третьему входам блока управления моделью, выходы которого соединены с соответствующими входами модели объекта, отличающаяся тем, что , с целью повышения точности системы, в ней установлеиь последовательно соединенные вторсй
счетчик и блок перезаписи кода и последовательно соединенные первый и второй функциональные преобразователи и релейный блок, выход которого соединен со входом инвертора и третьим вхоцом
модели объекта, выход дешифратора соединен со входом генератора тактовых импульсов, вторым входом блока перезаписи кода и nepsbJM входом второго счетчика, второй вход которого подключен ко второму входу первого счетчика, третей вход которого юдключеИ к выходу блока памяти и входу задатчнка, выход которого соединен с первым входом первого функционального преобразователя, второй вход которого соединен с выходом модели объекта.
Источники информации, принятые во внимание при экспертизе:
1.Заявка Mb 1,934939/18-24,
кл. QOS В 13/02,18. Об.1973, по которой принято решение о выдаче авторского свидетепьства.
2.Авторское свидетельство СССР №161145, кл. Q05 Q 7/36, О9.О3.64.
3.Авторское свидетельство СССР NJ 499553, кл. Q05 В 11/16, 16.04,73.
4.Авторское свидетельство СССР
Jsfc 171671, кл. Q06 G7/02, 26.О5.65.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система оптимального управления | 1979 |
|
SU824140A2 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Устройство для решения обратной задачи теплопроводности | 1976 |
|
SU646350A1 |
| Установка для электродинамических испытаний устройств релейной защиты и автоматики | 1989 |
|
SU1784928A1 |
| Автоматическое устройство для формирования и испытания химического источника тока | 1983 |
|
SU1112446A1 |
| Многоканальный релейный спектроанализатор | 1983 |
|
SU1140129A1 |
| Устройство для контроля параметров | 1985 |
|
SU1291930A1 |
| Многоканальный регулятор тепловых процессов (его варианты) | 1980 |
|
SU943667A1 |
| ДВУХПОЗИЦИОННЫЙ АДАПТИВНЫЙ ЭЛЕКТРОННЫЙ РЕГУЛЯТОР | 1997 |
|
RU2138071C1 |
| СПОСОБ КОНТРОЛЯ ВЕЛИЧИНЫ ДОПУСТИМОГО СБЛИЖЕНИЯ ДВУХ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2033359C1 |
Т22
