1
Изобретение относится к системам автоматического управления химикотехнологическими процессгши и аппаратами, -метсшлорежущими станками и т.д..
По основному авт.св. №618721 из.аестны системы оптимального управле,ция, содержащие фиксаторы, ключи, схемы сравнения, усилители, нелинейные преобразователи, сумматор, инверторы, схемы совпадения, одновибратор, триггер и схему сброса
В указанных системах реализуется оптимальный закон управления как , постоянных, так и изменяющихся во времени задающих воздействий, и формируются управляющие воздействия на основе текущей информации о состоянии объекта, что исключает их применение для оптимизации процессов с последействием транспортным запаздыванием в координатах объекта).
Наиболее близкой к предлагаемой по технической сущности является система оптимального управления, содержащая задатчик, последовательно соединенные второй счетчик, блок перезаписи кода и первый счетчик, к первому входу которого подключен генератор тактовых импульсов, и дешифратор, выход которого соединен с первым входом блока.управления моделью, и первыми входами элементов И вторые входы которых соединены с соответствующими выходами инвертора, а выходы - с соответствующими входаык триггера, объект, выход которого подключен ко второму входу блока управления моделью,
0 выходка KOTcqjoro соединены с соответствуивдими входами объекта, и выходами последовательно соединенных первого и второго функциональных преобразователей, релейный блок,
5 вход которого соединен с выходом второго функционального Преобразователя, а выход - со входом инвертора и третьим входом модели объекта, выход дешифраторов соединен со входом
0 генератора тактовых импульсов, вторым входом перезаписи кода и первым Заходом второго счетчика,- второй вкод которого подключен ко второму входу первого счетчика, -.третий
5 которого подключен к выходу блока , перезаписи кода и входу задатчика; выход которого соединен со вторым входом первого функционального, преобразователя, третий вход которого соединен с выходом модели объекта ЗГ|
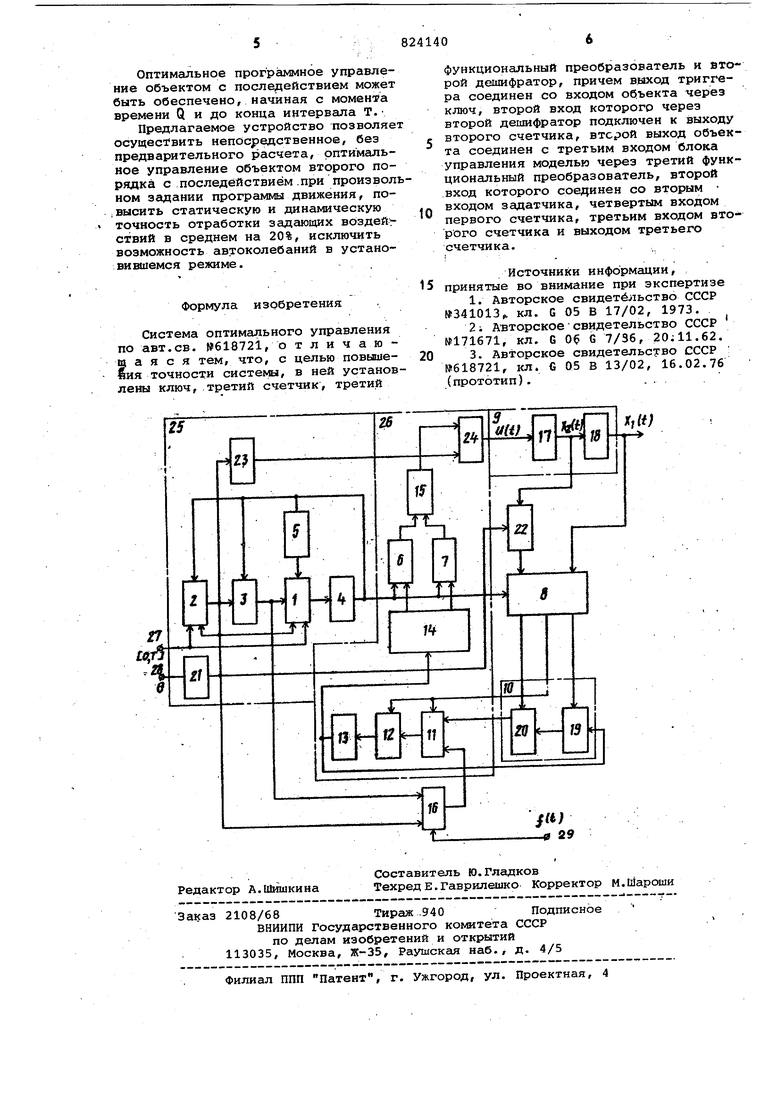
0 Однако известная система не обеспечивает требуемой статической и динамической точности при наличии чистого временного запаздывания в координатах объекта. Цель изобретения - повышение точности системы оптимального управления. Поставленная цель достигается тем, что в системе установлены ключ, третий счетчик, третий функциональный преобразователь и второй дешифратор, причем выход триггера соедине со входом объекта через ключ, второй вход которого через второй дешифрато подключен к .выходу второго счетчика, второй выход объекта соединен с третьим входом блока управления моделью через третий функциональный преобразователь, второй вход которого соеди . нен со вторыг.1 входом задатчика, четвертым входом первого счетчика, третьим входом второго счетчика и выходом третьего счетчика. Па чертеже приведена блок-схема предлагаемой системы. Система содержит первый и второй счетчики 1 и 2, блок 3 перезаписи кода, первый дешифратор 4, генератор 5 тактовых импульсов, первый и второй элементы И б и 7, блок 8 управления моделью, объект 9, модель 10 объекта, первый и второй функциональ ные преобразователи 11 и 12, релейный блок 13, инвертор 14, триггер 15 задатчик 16, дина1.шческие звенья 17 и 18 объекта, динамические звенья 19 и 20 модели, третий счетчик 21, третий функциональный преобразователь 22, второй дешифратор 23, ключ 24, блок 25 формирования интервалов времени, блок 26 формирования сигнала управления, вход 27 записи кода интервала оптимизации на интервале . 6, т}, вход 28 записи кода значения времени запаздывания Q, вход 29 запи си заданной программной функции f(t Система работает следующим образо В счетчик 2, работающий на вычита нии от импульсовдешифратора 4, по входу 27 записи кода, заносится число, соответствующее длине фиксирован ного интервала 0, Т, которое умень шается посредством счетчика 21 на ве личину запаздывания Q. Подобным обр зом такое же число заносится в счет чик 1, работающий на вычитание от генератора 5 тактовых импульсов. Од новременно с этим происходит сдвиг на величину времени запаздывания Q значения функции f(t) в задатчике 16 и упреждается координата (t) в функциональном преобразователе 22 на величину,, Q. преобразованием начал ной функции tf(t) для переменной x,3(t) объекта, заданной на отрезке времени J|6, ТJ. (Если для этого тре буется время, то оно является подго товительным для всей системы, т.е. е работают все блоки за исключением четчика 21 и функционального преобазователя 22). ,. В дальнейшем при работе объекта ункциональный преобразователь 22 ормирует упрежденные значения кооринаты X;j(t) объекта 9 на время о сравнению их текущими значенияи. Сигнал, появляющийся на выходе ешифратора 4, фиксирует конец инервала времени работы быстрой моели 10 объекта и посредством блока 8 управления моделью устанавливает нулевые начальные условия на функциональных преобразователях 12 и 11, а также соответствующие начальные условия на динамические звенья 19 и 20 модели, которые определяются текущим состоянием динамического звена 17 и функционального преобразователя 22. Одновременно с этим сигйал с выхода дешифратора 4 прерывает поступление тактовых импульсов от генератора 5 тактовых импульсов всчетчик 1, а блок 3 перезаписи кода переносит код счетчика 2, укороченный на один такт в счетчик 1, и процесс решения повторяется на укороченном на один такт интервале времени. . Функциональный преобразователь 22, выполненный н.а операционном усилителе, представляет собой динамическое звено, структурно повторяющее функциональное звено. 18 объекта, но без запаздывания Q. Функциональные преобразователи Ц и 12 представляют собой выполненные на операционных усилителях динамические звенья первого порядка, структурно повторявшие объект 9 без учета запаздывания и работающие в ускоренном, по отношению к объекту 9, времени. Преобразо.ватели 11 и 12, релейный блок 13 и инвертор 14 реализуют оптимальный алгоритм управления объектом данного класса следукядий из принципа максимумаОптимальные воздействия на объект 9 формируются посредством логическиз4 элементов 6 и 7, триггера 15 .в момент окончания очередного интервала работы быстрой модели, т.е. в момент появления сигнала на выходе дешифратора 4, и поддерживается таковым до окончания следующего за ним интервала -решения. Передача управления на объект 9 от триггера 15 осуществляется посредством ключа 24, который управляется дешифратором 23 нуля и Отключает управление от Объекта 9 в конечный момент времени. / Управляемый задатчик 16 многократно генерирует сигнал f, соответствующий программной функции f (t), вводимой по входу 29, на интервале решения быстрой модели,, который определяется блоком 3 перезаписи.
Оптимальное программное управление объектом с последействием может быть обеспечено, начиная с момента времени Q и до конца интервала Т.
Предлагаемое устройство позволяе осуществить непосредственное, без предварительного расчета, оптимальное управление объектом второго порядка с последействием .при произволном задании программы движения, по.высить статическую и динамическую точность отработки задающих вс)здей ствий в среднем на 20%, исключить возможность автоколебаний в установившемся режиме.
Формула изобретения
Система оптимального управления по авт.св. 61872i, о т л и ч а ю ta я с я тем, что, с целью повышеия точности системы, в ней установлены ключ, третий счетчик, третий
функциональный преобразователь и второй дешифратор, причем выход триггера соединен со входом объекта через ключ, второй вход которого через второй дешифратор подключен к выходу второго счетчика, второй выход объекта соединен с третьим входом блока управления моделью через третий функциональный преобразователь, второй вход которого соединен со вторым входом задатчика, четвертым входом первого счетчика, третьим входом второго счетчика и выходом третьего счетчика.
Источники информации, 5 принятые во внимание при экспертизе
1. Авторское свидетельство СССР №341013,, кл. G 05 В 17/02, 1973.
2 i Авторское свидетельство СССР №171671, кл. G 05 G 7/36, 20Л1.62. 20 3. Авторское свидетельство СССР : №618721, кл. G 05 В 13/02, 16.02.76 (прототип)., . . 

| название | год | авторы | номер документа |
|---|---|---|---|
| Система оптимального управления | 1976 |
|
SU618721A1 |
| Система управления для объектов с переменным запаздыванием | 1986 |
|
SU1383291A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ЛИНЕЙНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ И ЗАДАТЧИК ПРОБНЫХ СИГНАЛОВ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2131139C1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| Адаптивная система управления | 1983 |
|
SU1174902A1 |
| Адаптивный коммутатор телеизмерительной системы | 1982 |
|
SU1083216A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2009 |
|
RU2430397C2 |
| Устройство для регистрации информации | 1984 |
|
SU1234858A1 |
