Изобретение относится к системам автоматической передачи информации, а я менно к дистаядаюнной передаче угда поворота вала, исяюльаующей вращающиеся трансформаторы,i
Известны устройства для дистанционной передачи угла поворота вала, в которых шш устранения рассогласования между ; датчиком и приемником установлен корректор LlJ.
Недостаток таких устройств (зостоит в том, что корректор выполняется в виде отдельнсяк индукционного элемента, ко- имеет сложное конструктивное решение.
Наиболее близким техническим решением к изббретению является устройство для дистаниионной передачи углаповфота вала, содержащее передающий вращаю- щийся трансформатор и принимающий вра дающийся трансформатор, одни конпы вы-; ходных обмоток которого соединены между собой и подключены к одному входу ф очувствительного выпрямителя, второй конец шрвс выходной обмезтки подюпочен к другому входу фааочувствитель ного выпрямителя, выходы которого соединены с модулятором L22.
Недостаток дтого устройства состоит в том, что сигнал коррекции вводится в обмотку передающего вращающегося трансформатора. Это приводит к тому, что устройство невозможно применять; в разветвленной схеме дистанционной передачи угла, в которой к одному передающему вращающемуся трансформатору подключает ся не один, а несколько дополнительных приемников, иа-за малой точности дистанционной передачи по сигналам дополнительных приемников, обусловленной вл1 йнием сигнала коррекции. недостаток такого устройства заключается в йалнчии у него двух дополнительных про- Ьодов связи между передающим и принижающим :вращающимися трансформаторами, оме обычнь Х трех проводов синхронизации.
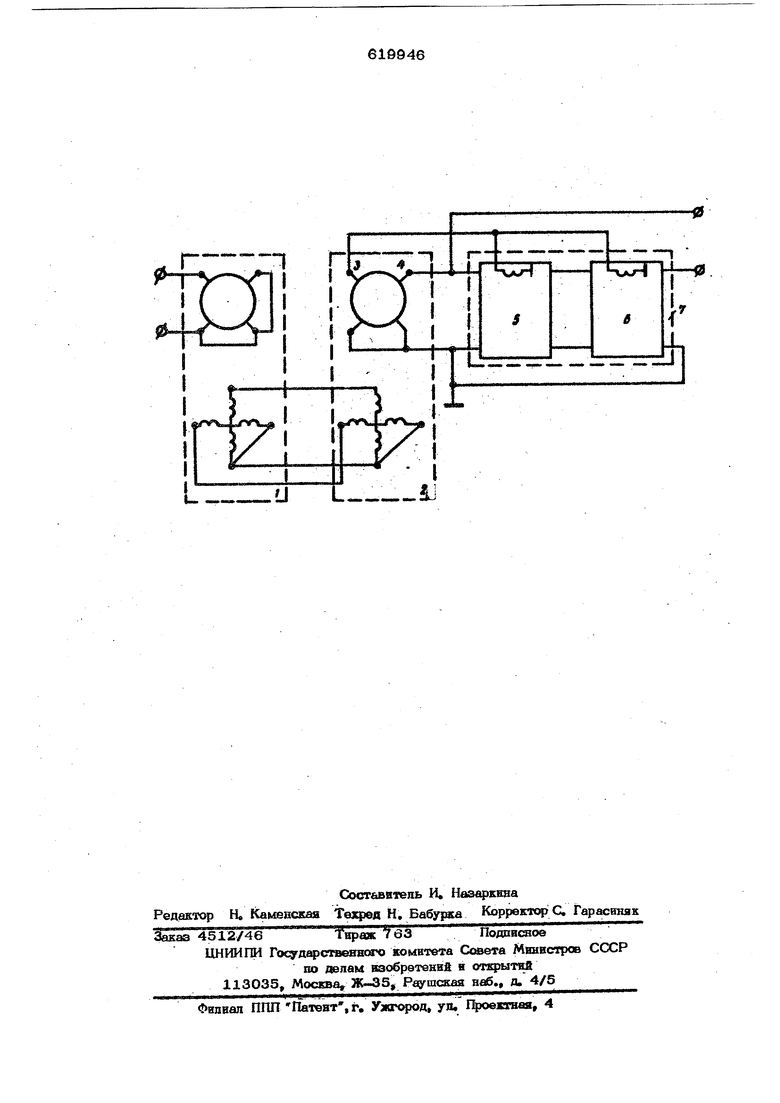
Шлью изобретения .является повышение надежности работы устройстба в разветвленной схеме передачи угла пра сохравевви высокой точноств передача н упрошенне устройства за счет искшочения двух соединительных проводо межлу передаюшвм и принимающим вращающимися трансформаторами устроЗства.: Лоставпенная цепь достигается за счф того, что свободный конец второй выходной обмотки принимаюше ч) вращающе гося, трансформатора соедЕшен со входами Опорного напряжения фазочувсгоитель ного выпрямителя н модулятора, выход которого соединен Иг одним входом фаао«Огвствительного выпрямителя. На чертеже изображена блок-схема устройства для дистанционной передачи угла поворота вала. .ъд ««.vrFj vr| i H. juaj4CA« Устройство содержит передающий вра щающийся трансформатор 1, принимающий вращающийся трансформатор 2 с вы ходными обмотками 3 н 4, фазочувствительный выпрямитель 5 и модулятор 6, образующие корректор 7, Остаточное напряжение, возникающее на выход1юй обмотке 4 приникгающего вращающегося трансформатора 2, выделяется с помощью фазо1увствителБного выпрямителя 5 и поступает на вход модулятора 6„ где оно модулирует по амплитуде напряжение другой выходной обмотки 3 принимающего вращающегося трансформатора 2. Поскольку предусм.от рено, что напряжение возбуждения модул тора 6 сдвинуто по фазе относительно н ряжения выходной обмотки 3 на угол, равный аргументу технического искажени напрягкения на выходной обмотке 4, на выходе устройства непрерывно корректи-п руется остаточнэе напряжение и погрещ- ность следования. Технологические искажения напряжент на выходной обмотке 4 принимающего вращающегося трансформатора 2 обычной дистанционной передачи на вращающихся трансформаторах можно записать в комплексной форме и относительных единицах следующим образом. . {(06), гдафц|((к)- соответственно аргумент и модуль технологического искажения напр женря данной дистанционной передачи; Об - угол передачи. Погрещность следования дистанционной передачи в этом случае равна лобТге Ф i (об) у а остаточное напряжение на выходаой обмотке 4 SUn., - 3 Sir} .sm Ф .f Н. Если теперь выделить остаточное напряжение с помощью фазочувствнтельного выпрямителя 5 корректора 7, то на последнего будет корректирующий сигнал1611 т К siw р |(ос) е где у -. фазовый сдвиг опорного напряжения модулятора относительна напряжения одугой ВЫХ9ДНОЙ обмотки 3 принимаю Щего вращающегося трансформатора, К - коэффициент передачи корректора 7, Составляющие коррект1д1ующего сигна ла равны . к J Ф -f (ot) -COSу j S« V Таким образом, при условии К gTo Н У г ф ШО сигнал погрещностн на выходе устройства будет скомпенсирован сиг налом корректора 7. Для дистанционных передач, имеющих однотипные передающие и принимающиевращающиеся трансформаторы, аргумент ф практически постоянная величину. Эта, дает возможность исключить индивидуаль ную настройку корректора 7 . для каждой дистанционной передачи без заме-шого нения ее тошости. Формула изобретение Устройство для дистангионной переда чн угла поворота вала, содержащее передающий вращающийся трансформатор н принимающий вращающийся трансформатор, одни концы выходных обмоток которсйхз соед1шены между собой и подключены к одному фазочувствительного вып рямителя, второй конец первой выходной обмотки подключен к другому входу фазочувствительного выпрямителя, выходы которого соед1щены с , о тличаюшееся тем, что, с деяыо упрощения устройства и повыщеиня его надежности, свободшай конец второй выходной обмотки принимающего, вращающегося трансформатора соединен с входами опорного напряжения фшзочувствительао го выпрямителя и модулятора, выход которого соединен с одним входом фазочув- ствительного выпрямителя, Источники информации, пронатыб во внимание при экспертизе: 1,Ахметжанов А. А, Системы передачи угла повышенной точности, 1966, с. 36-38, 2,Авторсжое свЕдетепьсгео СССР № 413520, KJuQ О8 С 19/46, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля погрешности вращаюшихся трансформаторов | 1972 |
|
SU451119A1 |
| Устройство для контроля погрешности вращающегося трансформатора | 1973 |
|
SU474835A1 |
| ВСЕСОЮЗНАЯ IПАШТ1ШЧЕХ(^^^'=НП:{АШ БИБЛИОТа.Ч.^^ I | 1972 |
|
SU349515A1 |
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
| Устройство для измерения среднеквадратичной ошибки следящей системы с дистанционной передачей на синусно-косинусных вращающихся трансформаторах | 1980 |
|
SU938174A1 |
| Устройство для дистанционнойпЕРЕдАчи углОВОгО пЕРЕМЕщЕНия | 1979 |
|
SU841010A2 |
| Устройство для дистанционной передачи угловых перемещений | 1974 |
|
SU498639A1 |
| Устройство для измерения угла закручивания бурильной колонны | 1982 |
|
SU1078037A1 |
| Устройство для дистанционной передачи углового перемещения | 1981 |
|
SU1001148A1 |
| Устройство для дистанционной передачи углового перемещения | 1980 |
|
SU964696A1 |