не регулируется, но требуется относительно калиброванное усилие.
Цель изобретения - обеспечение контроля пружин по их реальной жесткости в зависимости от величины деформации.
Эта цель достигается За счет того,
что в автомат введен измерительный шток с гильзой и электромагнитный механизм стопорения гильзы, электрическая цепь которого замкнута через испытуемую пружину и измерительный шток, в котором смонтированы два измеритель, ных узла с эталонными пружинами (йаксимального и минимального допустимого усилия сжатия испытуемой пружины и микровыключателями, а механизм сжатия выполнен в виде винтовой пары, связанной через измерительный шток с испыту емой пружиной
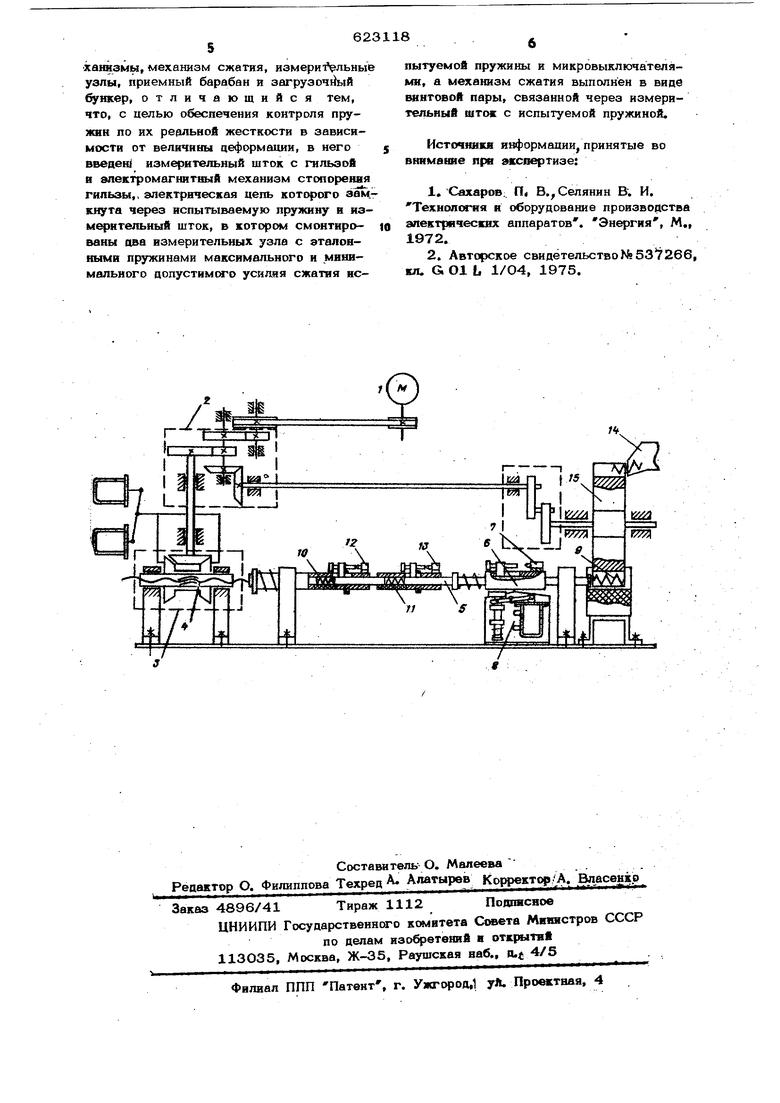
На чертеже представлен описываемый автомат для контроля винтовых цилиндрических пружин сжатия по развиваемым усилиям в зависимости от величины цейетвйтельной линейной аефо{ / ации.
Автомат содержит двигатель 1, передаточный механизм 2, реверсивный механизм 3, механизм сжатия 4, выполненный в виде винтовой пары, измерительный шток 5 с гильзой б, на котором расположен микровыкльочатель 7, электромагнитный механизм 8 стопорения гильзы, электрическая цепь которого замкнута через испытуемую пружину 9 и измерительный шток 5, в котором смонтированы измерительные узлы 10 и 11 с эталонными пружинами и. соответственно микровыключателями 12 и 13. Электромагнитный механизм 8 и гйльза 6 с микровыключателем 7 служит для того, чтобы выдержать заданную величину деформации. Винтовая пара 4 связана через шток 5 с испытуемой пружиной 9. Автомат имеет загрузочный бункер 14, подающий барабан 15, который движется от реверсивного механизма через.мальтийский крест.
Автомат работает следующим образом
От двигателя 1 вращение передается на передаточный механизм 2 и через него на реверсивный механизм 3, который через винтовую пару 4 передает постунательное движение штоку 5 в направлении испытуемой пружины 9. От механизма 2 через мальтийский крест - получает движение подающий барабан 15. Попадая в зону контроля, пружина 9 сжимается. Пока измерительный шток 5 не кос.нется пружины 9 стопор механизма 8 стопорения гильзы находится в нижнем положении, и гильза б вместе с измерительным штоком 5 движется по направлению к пружине 9, В момент касания пружины 9 измерительного штока 5 через пружину замыкается электрическая цепь электромагнита механизма стопорения гильзы. Последний; срабатывает и ctonop останавливает гильзу 6 с расположенным на ней микровыключателем 7. В этот момент начинает сжиматься пружина 9 и одновременно отсчитывается ее линейная деформация. Винт на штоке 5 приближается к микровыключателю 7. В момент срабатывания микровыключателя 7 процесс деформации пружины 9 заканчи вается, подается электрический сигнал на электромагнит реверсивного механизма 3, измерительный шток 5 меняет напра1зление на противоположное, подающий барабан 15 подает в зону контроля следующую пружину, поступающую из загрузочного бункера 14, и процесс контроля годности пружин повторяется.
Годность пружины 9 оценивается двумя измерительными узлами 1О и 11, снаженнь):ми эталоннь1ми пружинами, сжатыми одна - до минимально, вторая - до ; максимально допустимых предельных усилий. Испытуемая пружина 9 сжимается й опред эленную величину деформации. Измврител ный шток 5 при сжатии пружины 9 на требуемую величину деформации вое принимает усилие сжатия, которое передается эталонным пружинам измерительных 10 и 11.
Если пружина 9 годная, то эталонная пружина, с}катая.на минимально допустимую величинуГ получает дополнительную деформацию, что приводит к размыканию микроБЫключателя 13. Эталонная пружина, тая„ на максимально допустимую величину, дополнительной деформации не получит и следовательно микровыключатель 12 не размыкается. Если пружина 9 слишком мягкая, размыкания микровыклгочателя 13 не наступит. Если пружина 9 слишком жесткая, разомкнется микро- выклкиатель 12,
Тав:им образом, данный автомат обеспечивает автоматизацию контроля пружин по их реальной жесткости (с учетом допусков на линейные размерь), что повышает качество и производительность контроля.
Формула изобретения
Авюмат для контроля винтовых цилиндрических пруяшн сжатия, содержшдий jliMгателЬ;, передаточный я реверсивный механизмы, механизм сжатия, измерительные узлы, приемный бврабан и загрузочный бункер, отличающийся тем, что, с целью обеспечения контроля пружин по их реальной жесткости в зависимости от величины цеформаиии, в него введен измерительный шток с гильзой и электромагнитный механизм стопорения гкльзы,, электрическая цепь которого замкнута через испытываемую пружину в измерительный шток, в котором смонтированы ова измерительных узла с эталонными пружинами максимального и минимального цопустимиго усйдня сжатия испытуемой пружины и микровыключателямн, а механизм сжатия выполнен в виде винтовой пары, связанной через измерительный шток с испытуемой пружиной.
ИСТОЧНИКЕ информации, принятые во внимание при экспертизе:
1.Сахаров; П« В. Селянин В. И, Технология и оборудование производства апектрическнх аппаратов . Энергия, М„ 1972.
2.Авторское свидетельство№53 7266 кл. GO1 L 1/04, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для контроля усилий пружин коммутационных аппаратов | 1978 |
|
SU741237A1 |
| Устройство для контроля усилийпРижиМА KACCET | 1979 |
|
SU851127A1 |
| Автомат для контроля усилия пружин | 1981 |
|
SU993052A1 |
| Устройство для определения твердости | 1989 |
|
SU1778619A1 |
| Устройство для контроля упругих и линейных характеристик пружин | 1983 |
|
SU1113688A1 |
| Устройство для автоматической подачи початков к мотальному автомату | 1978 |
|
SU745841A1 |
| Автомат для контроля резьб | 1987 |
|
SU1446442A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ШВЕЙНЫХ МАТЕРИАЛОВ И УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2538725C2 |
| Автомат для контроля и сортировки гнезд штепсельных разъемов | 1989 |
|
SU1743654A1 |
| Машина трения | 1989 |
|
SU1714456A1 |
