1
Изобретение относится к измеритель-, ной технике и может быть использовано во всех отраслях народного хозяйства где требуется массовый контроль цилиндрических пружин сжатия, например для контроля пружин, обеспечивающих определенные усилия контактных нажатий в электрических аппаратах, при испытании пружин сжатия ремонтируемых автомобилей и сельскохозяйственных машин и т.п.
Известно устройство для контроля пружин, содержащее приводное устройство, связанное с механизмом подачи и механизмом нагружения 1.
Производительность контроля и точность его малы, так как в автомате используются эталонные пружины, кроме того, измерительные узлы громоздки, что также усложняет наладку авто мата для контроля пружин.
Наиболее близким по технической сущности к предлагаемому является
устройство для измерения упругих характеристик пружин, содержащее приводное устройство, связанное с механизмом подачи и механизмом нагружения пружин, и устройство для измерения высоты пружины, контактирующее с механизмом нагружения и связанное с силоизмерительным устройством L2j.
Однако такое устройство для измерения упругих характеристик пружин
10 не учитывает непараллельности оснований испытуемой пружины, что снижает качество и производительность процесса контроля.
Цель изобретения - повышение ка15чества и производительности процесса контроля.
Указанная цель достигается тем, что автомат снабжен устройством контроля параллельности оснований пру20жины, выполненным в виде испытательной платформы, жестко связанной со стержнем, соединенным- через сферический шарнир с корпусом, жестко закрепленным на силоизмерительном устройстве и связанным с датчиком углового положения стержня.
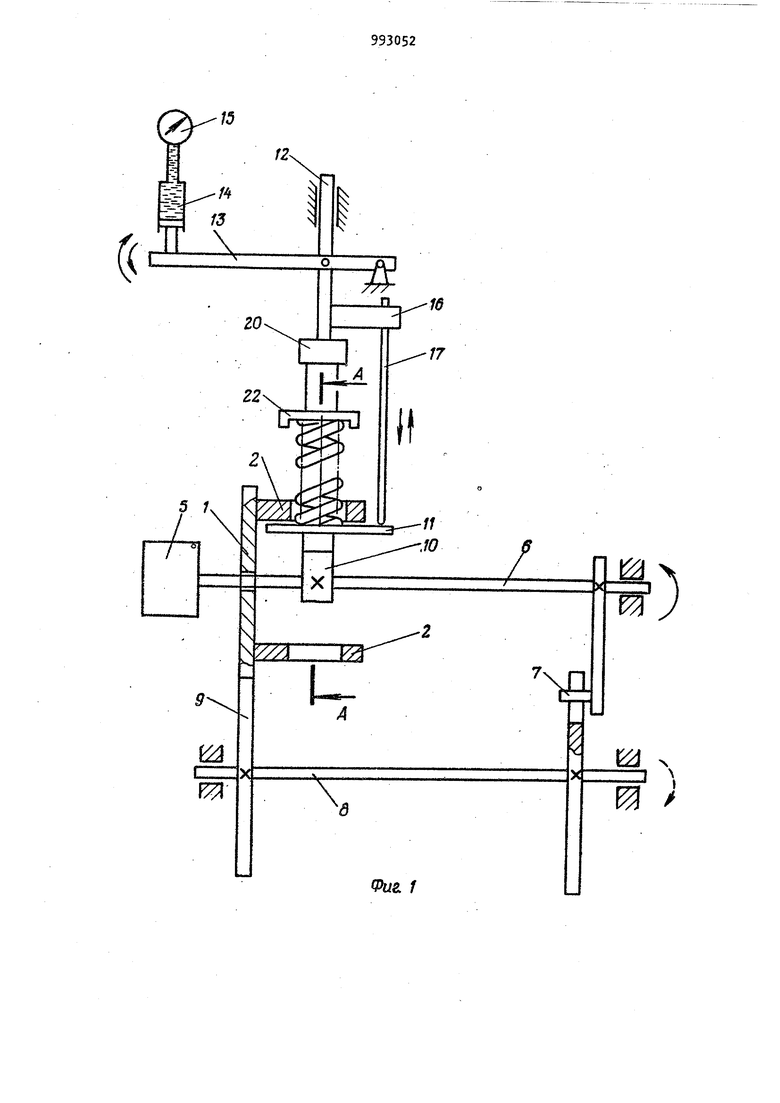
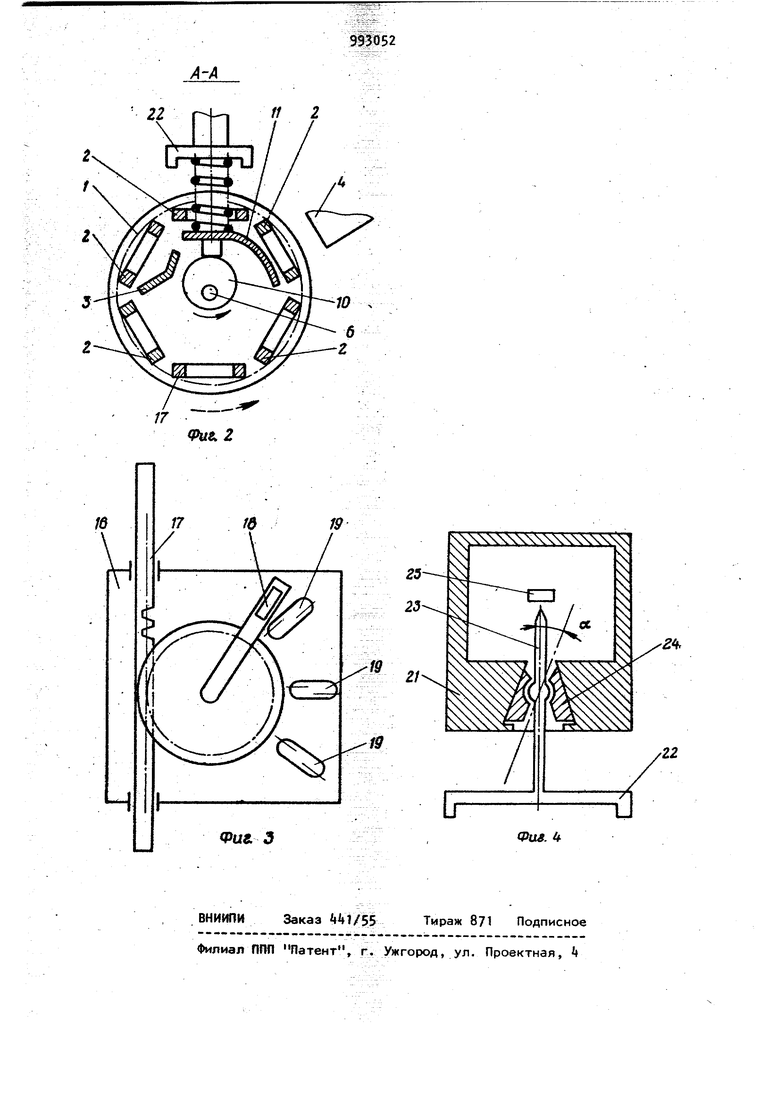
На фиг. 1 схематически изображен автомат дпя контроля пружин; на фиг. 2 - разрез А-А на фиг. 1J на фиг. 3 - схема измерителя высоты пружины; на фиг. k - схема устройства контроля параллельности оснований пружины.
Автомат для контроля пружин включает {фиг.-,,1) механизм подачи, состоящий из ведомой шестерни-подавателя 1, на которой закреплены фиксирующие гильзы 2, лотка 3 выброса и лотка k подавателя (фиг. 2); приводное устройство, имеющее мотор-редуктор 5, который вращает приводной вал 6, периодически перемещающий е помощью передачи 7 прерывистого действия типа мальтийский крест, ведомого вала: 8 и ведущей шестерни 9 шестернюподаватель 1, механизм нагружения, состоящий из кулачка 10 последовател ного нагружения, воздействующего на испытуемую пружину, помещенную на опорный стол 11; силоизмерительное устройство, состоящее из штанги 12 и силового рычага 13 воздействующего на шток-поршень цилиндра 1 с жид костью, давление которой контролируется электрокрнтактным манометром 15 На штанге 12 силоизмерительного устройства закреплено устройство 16 для непрерывного контроля высоты пружины состоящее из зубчатой рейки 17, спирающейся на опорный стол 11, зубчатйй шестерни с подвижной стрелкоймагнитом 18 и герконов 19, электрически связанных с силоизмерительным устройством (фиг. 3)
Устройство 20 контроля параллельности оснований пружины закреплено н штанге 12 и включает в себя следующие составные части (фиг. 4): корпус 21, испытательную платформу 22, имеющую стержень со сферическим выступом 23 сухарики 2 и датчик 25 отклонения, например, электроконтактного типа. Сферический выступ 23 и углубления в сухариках 2k образуют сферический шарнир. Стержень со сферическим выступом 23 воздействует на датчик 25 Сухарики 2 размещен{)| в коническом углублении корпуса 21 и могут совершать небольшие перемещения в осевом направлении.
Устройство работает следующим образом.
Испытуемая пружина поступает с лотка подавателя в фиксирующую гильзу 2 шестерни-подавателя 1. При очередном повороте шестерни-подавателя 1, осуществляемом с помощью--передачи 7 прерывистого действия, гиль за 2 с пружиной переходят на испытательную позицию, при этом пружина фиксируется опорным столом П и испытательной платформой 22 устройства 20 контроля параллельности оснований пружины. На данном этапе с помощью устройства для непрерывного измерения высоты пружины происходит контроль высоты пружины в свободном состоянии, При нахождении данного параметра в допустимых пределах стрелка-магнит зубчатой шестерни 18 воздействует на соответствующий геркон 19 замыкание которого регистрируется контрольным устройством (не показано) . При вращении кулачка 10 последовательного нагружения опорный стол 11, перемещаясь вверх,начинает сжимать испытуемую пружину. Достижение первой контрольной деформации регистрируется соответствующим герконом 18 устройства для непрерывного измерения высоты пружины, который подает сигнала силоизмерительную часть на измерение первого рабочего усилия эле.ктроконтактным манометром 15. При дальнейшем сжатии пружины аналогично производится контроль по второму рабочему усилию. Выброс пружины в лоток 3 выброса осуществляется при очередном перемещении шестерни-подавателя 1.
При сжатии пружины на испытательной позиции испытательная платформа 22 под действием усилия пружины перемещает сухарики 2k в коническом углублении корпуса 21 на величину имеющегося люфта, благодаря чему сухарики 2 сжимают сферический выступ стержня 23, фиксируя испытательную платформу 22 в положении, при котором нижняя плоскость испытательной платформы 22 оказывается параллельной верхнему основанию.пружины. При этом стержень 23 отклоняется от оси на угол оС, равный углу непараллельности оснований пружины, 8 том случае, если угол о не превышает допустимую величину, стержень 23 воздействует на датчик 25. в результате чего регистрируется сигнал с годности пружины по данному параметру. Далее пружина подается в
лоток 3 выброса, где контролируемые пружины сортируются.
Благодаря тому что в автомат для контроля пружин введено устройство контроля параллельности оснований пружины автомат позволяет контролировать параллельность оснований пружины и длину ее в свободном состоянии, что повышает качество контроля. Контроль этих параметров производится одновременно с контролем ра;6очих усилий измеряемых силризмерительным устройством по сигналам устройства для непрерывного измерения высоты пружины Это позволяет осу(цествлят.ь весь процесс контроля на одной рабочей позиции, что значительно повышает его производительность.
Конструкция автомата позволяет использовать .один и тот же привод для одновременного контроля несколь ких пружин, причем не обязательно идентичных, что также увеличивает производительность контроля. Формула изобретения
Автомат для контроля -усилия пружин, содержащий приводное устройство, связанное с механизмом подачи и механизмом нагружения пружины, устройство для измерения высоты пружины, контактирующее с механизмом нагружения и связанное с силоизмерительным устройством, о т л и ч а10 |Ц и и с я тем, что, с цепью повь1шения качества и производительности. процесса контроля, он снабжен устройством контроля параллельности оснований пружины, выполненным в.виде испытательной платформЫг жестко связанной со стержнем связанным Через сферический шарнир с корпусом, жестко закрпленным на силоизмерительмом устройстве и связанным с датчиком углового положения стержня.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР If 623118, кл. G of Ll/Ot, 1978.
2.Авторское свидетельство СССР К 739350, кл. G 01 L I/O, 1980 , (прототип).
15
Г2х
74
f3
(
20
П-,16
r
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для контроля усилия пружин | 1984 |
|
SU1154559A2 |
| Устройство для автоматического контроля пружин | 1985 |
|
SU1377627A1 |
| Автомат для контроля пружин растяжения | 1983 |
|
SU1154558A1 |
| СТЕНД ДЛЯ УСТАЛОСТНЫХ ИСПЫТАНИЙ ГРУПП ОБРАЗЦОВ ПРИ ЦИКЛИЧЕСКОМ ИЗГИБЕ | 2012 |
|
RU2515188C2 |
| АВТОМАТ ДЛЯ ДОМОТОКИ ШПУЛЬ | 1952 |
|
SU98613A1 |
| Автоматическая линия изготовления жестяных консервных банок | 1986 |
|
SU1362550A1 |
| Автоматическая линия для механических испытаний изоляторов | 1981 |
|
SU982104A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2027159C1 |
| МАШИНА ДЛЯ ОПРЕДЕЛЕНИЯ КОЛЕЕОБРАЗОВАНИЯ АСФАЛЬТОБЕТОННЫХ ПОКРЫТИЙ ПРОКАТЫВАНИЕМ НАГРУЖЕННОГО КОЛЕСА (ВАРИАНТЫ) | 2013 |
|
RU2554289C2 |
| Автомат для контроля и сортировки герконов | 1990 |
|
SU1749941A1 |
22
L
2
