Изобретение относится к устройствам для автоматического вычерчивания диаграммы скоростей рабочего и холостого хода ползуна, приводимого в действие через посредство кулисы.
Согласно изобретению в устройстве применены дополнительные кулисы, связанные между собой валиком с одинаковыми шестернями, из которых кулиса приводится в движение горизонтальной планкой, принудительно перемещаемой по направлению подвижной в горизонтальном направлении вертикальной планки при помощи камня кулисы, в свою очередь, приводимого в движение от главного вала механизма при помощи укрепленного на плоскости колеса, диска с прорезом, а кулиса служит для получение точки пересечения с вертикалью и тем самым определение отрезка Bd, пропорционального горизонтальной скорости ползуна, путем ее взаимодействия при помощи камня, расположенного в точке d, с подвижной в горизонтальном направлении вертикальной колонкой, управляемой кривошипом, расположенным в одной плоскости с двумя кулисами и жестко укрепленным на их общем валу.
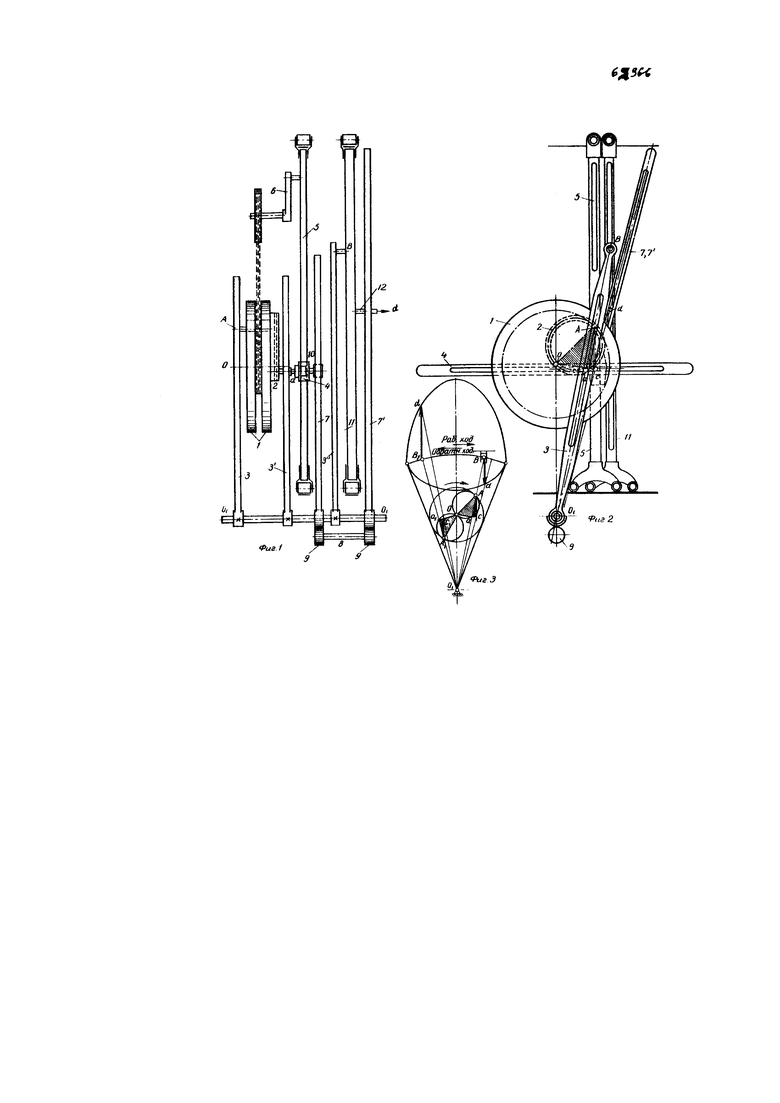
На фиг. 1 и 2 изображено описываемое устройство в двух проекциях, на фиг. 3 - схема действия устройства.
Действие устройства основано на известном положении из теории механизмов, согласно которому прямоугольный треугольник Аа0 (см. фиг. 3) представляет собою повернутый на 90° план скорости в масштабе, а катет Аа-вектор переносной скорости камня А кулисы и, следовательно, скорости вращения νA точки А кулисы. При помощи треугольника АаС скорость νA разлагается на две составляющие, из которых вектор Ас представляет собою вектор горизонтальной составляющей скорости νA, то есть νA h (на плане скорости вектор повернут на 90°).
Проводя через точку В (верхний конец кулисы) линию Bd параллельно Ас и продолжив линию 0аС до пересечения с направлением Bd, получают отрезок Bd, который представляет собою вектор горизонтальной составляющей скорости νB, то есть νB h, повернутый на 90°.
Величина скорости νB h будет горизонтально направленной скоростью ползуна. Треугольники 0A1a1, и A1a1c, представляют собою те же построения для обратного хода механизма.
Таким образом, фиксируя положение точек d, d1 и так далее, соответственно, отрезки Bd, B1d1 и так далее, можно будет получать в масштабе скорости ползуна, а при соединении непрерывной кривой точек d, d1 и так далее - диаграмму скорости ползуна. На этой диаграмме нижняя часть кривой показывает изменение скорости ползуна при рабочем ходе, а верхняя часть - при обратном (холостом) ходе.
Рассматривая приведенные выше построения, можно вывести следующее:
точка "а" плана скорости всегда располагается на окружности, проведенной на диаметре А0, в точке пересечения этой окружности с осью кулисы 0В;
точка с располагается на линии пересечения горизонтали, проведенной черев точку а с вертикалью, проведенной через точку А;
точка d располагается на линии пересечения продолжения прямой 01C с вертикалью, проведенной через точку В. Соблюдение этих условий осуществлено в описываемом устройстве.
Устройство состоит из ведущего колеса 1, у которого расстояние от оси вращения до пальца А составляет радиус ведущего кривошипа. На задней стороне колеса 1 прикреплен диск 2, на котором имеется круговой прорез диаметром, равным 0A. Одинаковые кулисы 3,3I и кривошип 3′′ закреплены на общей оси 0I0I и совершают таким образом одно общее движение. Кулиса 3 приводится в движение от пальца А. Камень "а", скользящий в кулисе 3′, имеет слева (фиг. 1) палец, скользящий в круговом прорезе диска 2, а справа - палец, входящий в прорез горизонтальной планки 4, одетой на вертикальную планку - колонку 5.
Положение колонки 5 определяется движением кривошипа 6, который имеет одинаковые размеры с радиусом ведущего колеса 0A и параллельно с ним расположен. Таким образом, в зависимости от положения пальца А определяется положение точек "а" и "с" из которых первая остается на окружности диаметра 0A, а вторая - на пересечении горизонтали, проходящей через точку "а". На оси 0I0I свободно сидят две одинаковые дополнительные кулисы 7 и 7′, которые совершают общие движения благодаря соединяющемуся c ними валика 8 c равными шестернями 9. Положение кулис 7 и 7′ определяется в зависимости от кольца 10, помещенного в точке с горизонтальной планки 4.
Кривошип 3′′ передвигает вторую вертикальную колонку 11, положение которой определяется точкой В кулисы 3′′. В кулисе 7′ помещается камень 12, скользящий по прорезу колонки 11 и прорезу кулисы 7′. Таким образом, камень 12 находится всегда на пересечении вертикальной линии, проходящей через точку В с осью кулисы 7′, то есть в требующейся точке d (фиг. 3).
Помещенный в точке d штифт или карандаш записывает на плоскости непрерывную кривую, представляющую собой диаграмму скорости движения ползуна, укрепленного в точке В. Диаграмма располагается по дуге поворота кулисы. Изменяя положение пальца, относительное расположение оси 0 и оси 0I0I, а также размеры ведущего колеса 1, то есть кривошипа 0A, возможно производить на приборе исследование кулисных механизмов разных размеров.
Устройство может быть использовано для исследования машин при соблюдении кратности размеров звеньев устройства с размерами механизма испытуемой машины.
Устройство для автоматического вычерчивания диаграммы скоростей рабочего и холостого хода ползуна, приводимого в действие через посредство кулисы, отличающееся применением двух дополнительных кулис 7, 7′ связанных между собой валиком 8 с одинаковыми шестернями 9, из которых кулиса 7 приводится в движение горизонтальной планкой, принудительно перемещаемой по направлению подвижной в горизонтальном направлении вертикальной планки 5 при помощи камня кулисы 3′, в свою очередь, приводимого в движение от главного вала механизма при помощи укрепленного на плоскости колеса 1, диска 2 с прорезом, а кулиса 7′ служит для получения точки пересечения с вертикалью и тем самым определения отрезка Bd, пропорционального горизонтальной скорости ползуна, путем ее взаимодействия при помощи камня, расположенного в точке d, с подвижной в горизонтальном направлении вертикальной колонкой 11, управляемой кривошипом 3′′, расположенным в одной плоскости с кулисами 3 и 31 и жестко укрепленным на их общем валу.
