Изобретение относится к машиностроению, а именно к непрограммируемым автооператорам циклового действия и может быть использовано для автоматизации загрузки-выгрузки технологического оборудо- вания.
Цель изобретения - расширение кинематических возможностей автооператора посредством получения траектории движения схвата с прямолинейными осевыми уча- стками.
Указанная цель достигается тем, что в предлагаемом автооператоре, содержащем кривошип, шатун, равный ему по длине, кулису с упором на конце, на сопряженных концах шатуна и кулисы имеется две пары упоров, ограничивающих взаимное вращение шатуна и кулисы, кулисный камень, шарнирно закрепленный на стойке, стержень, жестко соединенный с кулисным кам- нем, схват, четыре неподвижных упора, установленных на стойке, дополнительную кулису, шарнирно соединенную со стержнем, имеющую упор, другой конец которой проходит через дополнительный кулисный камень, между дополнительным кулисным камнем и упором на дополнительной кулисе установлена пружина, коромысло, один конец которого шарнирно соединен со стойкой в точке крепления кулисного камня, а другой конец соединен с дополнительным кулисным камнем к кулисе жестко присоединяется второй стерженька конце которого крепится схват.
Сопоставительный анализ с прототи- пом показывает, что заявляемый автооператор отличается тем, что в нем имеется второй стержень, жестко присоединенный к кулисе, на конце которого установлен схват. Предлагается также модификация автоопе- ратора, отличающаяся от основной схемы наличием приводного схвата, привод которого осуществляется от ползуна, установленного на втором стержне и жестко связанного с кулисным камнем.
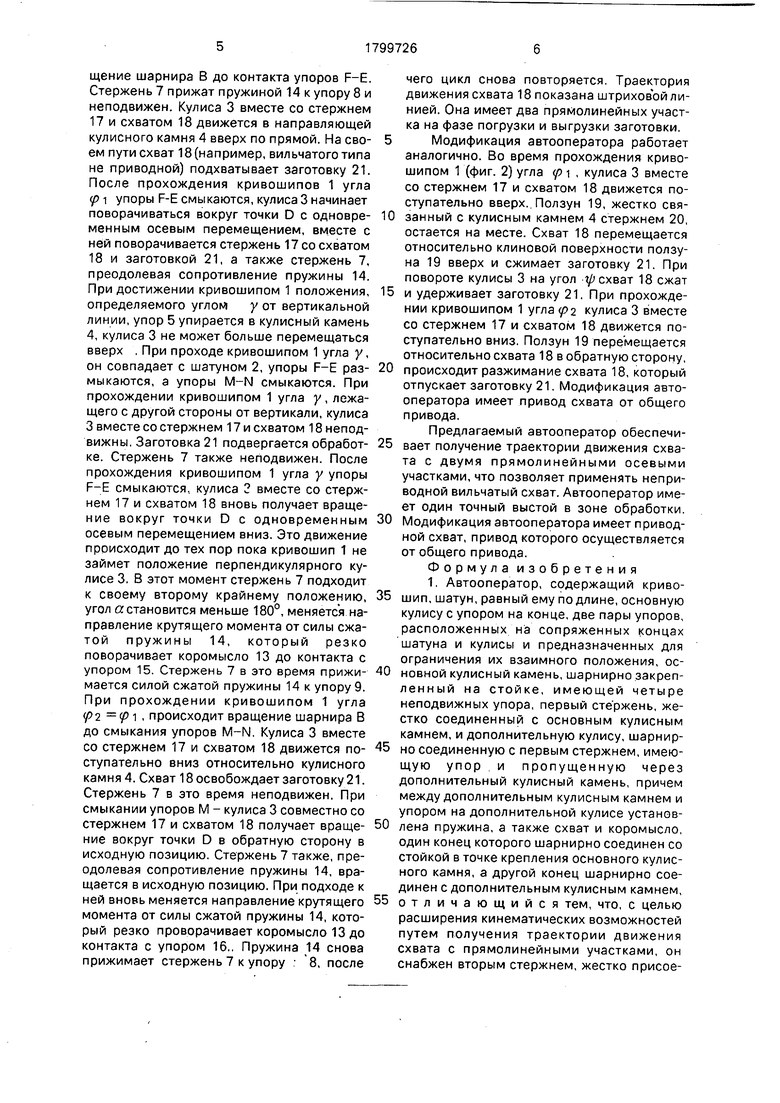
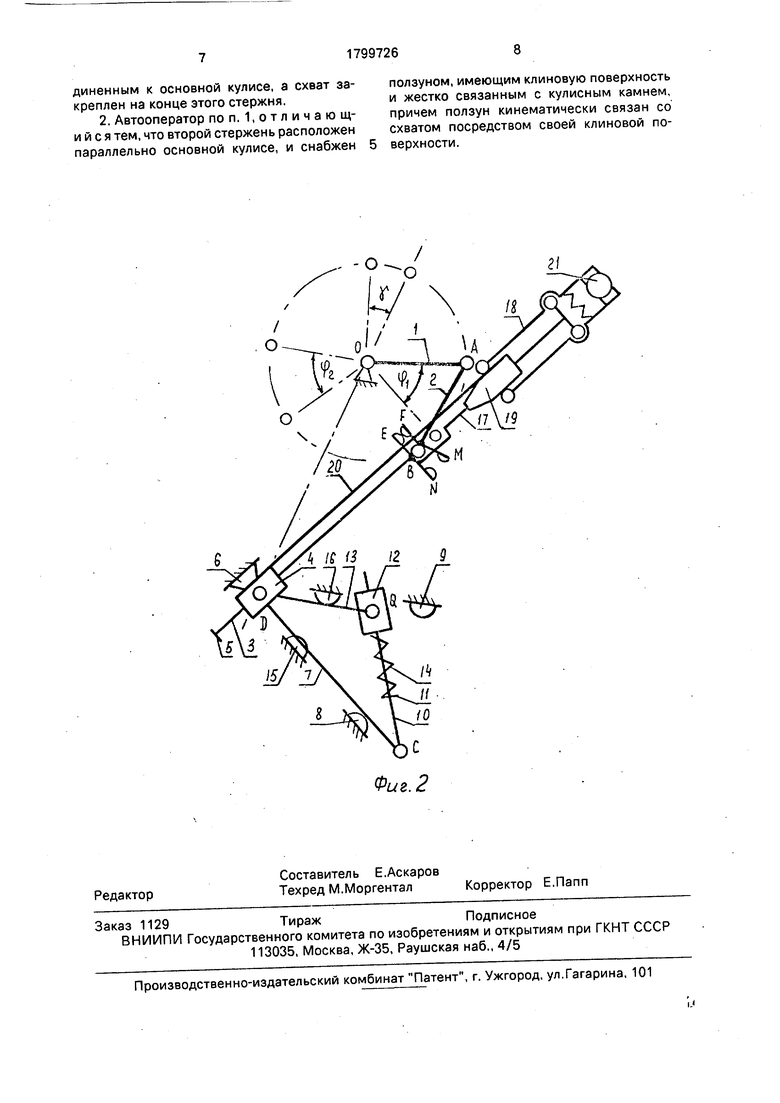
На фиг. 1 показана кинематическая схема автооператора; на фиг. 2 - кинематическая схема модификации автооператора.
Автооператор состоит из следующих частей: кривошипа 1 (фиг. 1), к которому шар- нирно прикреплен шатун 2, длина которого равна длине кривошипа 1. К другому концу шатуна 2 шарнирно прикреплена основная кулиса 3, которая проходит через основной кулисный камень 4. На свободном конце кулисы 3 расположен упор 5. Кулисный камень 4 шарнирно установлен на основании (стойке) 6. Длина кулисы 3 упора 5 равняется- - + L где I - длина кулисного камня 4,
L - расстояние между центрами вращения кривошипа 1 и кулисного камня 4. На сопряженных концах шатуна 2 и кулисы 3 имеется две пары упоров M-N и F-E, ограничивающих вращение кинематической пары В углом у , равным углу поворота кривошипа, соответствующего выстою. При смыкании упоров M-N шатун 2 и кулиса 3 находятся на одной прямой линии. К кулисному камню 4 жестко присоединен первый стержень 7. В крайних положениях своего качания стержень 7 контактирует с упорами 8 и 9, установленными на основании б. Первое крайнее положение стержень 7 занимает при совпадении кулисы 3 с касательной, проведенной из точки D к окружности, описываемой концом А кривошипа 1 и сомкнутых упорах M-N. Второе крайнее положение стержень 7 занимает при перпендикулярности кулисы 3 к кривошипу 1 и сомкнутых упорах F-E. Угол качания стержня 7 гр равен:
гр arcsin (-Ј- + arcsin (-Ј-)
(1 -siny),
где г - длина кривошипа 1. На конце стержня 7 шарнирно закреплена дополнительная кулиса 10 с упором 11. Свободный конец дополнительной кулисы 10 проходит через дополнительный кулисный камень 12, шарнирно укрепленный на коромысле 13, который другим концом шарнирно установлен на основании 6 в точке D крепления кулисного камня 4 независимо от него. Между упором 11 и дополнительным кулисным камнем 12 на дополнительную кулису 10 надета пружина 14 с предварительным сжатием. Угол качания коромысла 13 ограничен упорами 15 и 16, установленными на основании 6 симметрично относительно биссектрисы угла тр качания стержня 7..Угол качания коромысла 13 должен быть на 2-3° меньше угла гр , К кулисе 3 жестко присоединен второй стержень 17, на конце которого установлен схват 18. В модификации автооператора (фиг. 2) на стержне 17 установлен ползун 19, жестко скрепленный с кулисным камнем 4 стержнем 20. Ползун 19 выполнен в виде клина и имеет кинематическую связь сосхватом 18 посредством высшей кинематической пары.
Автооператор работает следующим образом.
Кривошип 1 вращается вокруг точки О (фиг. 1), При прохождении им угла фц arccos(1 -sin у) происходит вращение шарнира В до контакта упоров F-E. Стержень 7 прижат пружиной 14 к упору 8 и неподвижен. Кулиса 3 вместе со стержнем
17 и схватом 18 движется в направляющей кулисного камня 4 вверх по прямой. На своем пути схват 18(например, вильчатого типа не приводной) подхватывает заготовку 21. После прохождения кривошипов 1 угла р 1 упоры F-E смыкаются, кулиса 3 начинает поворачиваться вокруг точки D с одновременным осевым перемещением, вместе с ней поворачивается стержень 17 со схватом
18 и заготовкой 21, а также стержень 7, преодолевая сопротивление пружины 14. При достижении кривошипом 1 положения, определяемого углом у от вертикальной линии, упор 5 упирается в кулисный камень 4, кулиса 3 не может больше перемещаться вверх . При проходе кривошипом 1 угла у, он совпадает с шатуном 2, упоры F-E размыкаются, а упоры M-N смыкаются. При прохождении кривошипом 1 угла у, лежащего с другой стороны от вертикали, кулиса 3 вместе со стержнем 17 и схватом 18 непод- вижны. Заготовка 21 подвергается обработке. Стержень 7 также неподвижен. После прохождения кривошипом 1 угла у упоры F-E смыкаются, кулиса 3 вместе со стержнем 17 и схватом 18 вновь получает вращение вокруг точки D с одновременным осевым перемещением вниз. Это движение происходит до тех пор пока кривошип 1 не займет положение перпендикулярного кулисе 3. В этот момент стержень 7 подходит к своему второму крайнему положению, угол «становится меньше 180°, меняется направление крутящего момента от силы сжатой пружины 14, который резко поворачивает коромысло 13 до контакта с упором 15. Стержень 7 в это время прижимается силой сжатой пружины 14 к упору 9. При прохождении кривошипом 1 угла ( (р 1 , происходит вращение шарнира В до смыкания упоров M-N. Кулиса 3 вместе со стержнем 17 и схватом 18 движется поступательно вниз относительно кулисного камня 4. Схват 18 освобождает заготовку 21. Стержень 7 в это время неподвижен. При смыкании упоров М - кулиса 3 совместно со стержнем 17 и схватом 18 получает вращение вокруг точки D в обратную сторону в исходную позицию. Стержень 7 также, преодолевая сопротивление пружины 14, вращается в исходную позицию. При подходе к ней вновь меняется направление крутящего момента от силы сжатой пружины 14, который резко проворачивает коромысло 13 до контакта с упором 16.. Пружина 14 снова прижимает стержень 7 к упору : 8, после
чего цикл снова повторяется. Траектория движения схвата 18 показана штриховЪй линией. Она имеет два прямолинейных участка на фазе погрузки и выгрузки заготовки.
Модификация автооператора работает аналогично. Во время прохождения кривошипом 1 (фиг. 2) угла р 1 , кулиса 3 вместе со стержнем 17 и схватом 18 движется поступательно вверх..Ползун 19, жестко связанный с кулисным камнем 4 стержнем 20, остается на месте. Схват 18 перемещается относительно клиновой поверхности ползуна 19 вверх и сжимает заготовку 21. При повороте кулисы 3 на угол -tp схват 18 сжат
и удерживает заготовку 21. При прохождении кривошипом 1 угла р2 кулиса 3 вместе со стержнем 17 и схватом 18 движется поступательно вниз. Ползун 19 перемещается относительно схвата 18 в обратную сторону,
происходит разжимание схвата 18, который отпускает заготовку 21. Модификация автооператора имеет привод схвата от общего привода.
Предлагаемый автооператор обеспечивает получение траектории движения схвата с двумя прямолинейными осевыми участками, что позволяет применять неприводной вильчатый схват. Автооператор имеет один точный выстой в зоне обработки.
Модификация автооператора имеет приводной схват, привод которого осуществляется от общего привода.
Формула изобретения
1. Автооператор, содержащий кривошип, шатун, равный ему подлине, основную кулису с упором на конце, две пары упоров, расположенных на сопряженных концах шатуна и кулисы и предназначенных для ограничения их взаимного положения, основной кулисный камень, шарнирно закреп- ленный на стойке, имеющей четыре неподвижных упора, первый стержень, жестко соединенный с основным кулисным камнем, и дополнительную кулису, шарнирно соединенную с первым стержнем, имеющую упор . и пропущенную через дополнительный кулисный камень, причем между дополнительным кулисным камнем и упором на дополнительной кулисе установлена пружина, а также схват и коромысло, один конец которого шарнирно соединен со стойкой в точке крепления основного кулисного камня, а другой конец шарнирно соединен с дополнительным кулисным камнем,
отличающийся тем, что, с целью расширения кинематических возможностей путем получения траектории движения схвата с прямолинейными участками, он снабжен вторым стержнем, жестко присоединенным к основной кулисе, а схват закреплен на конце этого стержня.
2. Автооператор по п. 1, о т л и ч а ю щ- и и с я тем, что второй стержень расположен параллельно основной кулисе, и снабжен
ползуном, имеющим клиновую поверхность и жестко связанным с кулисным камнем, причем ползун кинематически связан со схватом посредством своей клиновой поверхности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1989 |
|
SU1685675A1 |
| Кривошипно-кулисный передаточный механизм с выстоем | 1988 |
|
SU1518602A1 |
| Кривошипно-кулисный передаточный механизм с выстоем | 1990 |
|
SU1793136A1 |
| Шарнирно-рычажный механизм с двумя выстоями | 1989 |
|
SU1629647A1 |
| ПРОТЯЖНАЯ РАДИАЛЬНО-КОВОЧНАЯ МАШИНА | 1992 |
|
RU2136429C1 |
| Кривошипно-кулисный механизм с выстоем | 1988 |
|
SU1518601A1 |
| Радиально-ковочная машина | 1991 |
|
SU1796333A1 |
| Кривошипно-ползунный направляющий механизм для ноги шагающего движителя | 1990 |
|
SU1751038A1 |
| Шайбонавивочный автомат | 1979 |
|
SU810347A1 |
| БЫТОВАЯ ШВЕЙНАЯ МАШИНА | 1996 |
|
RU2091526C1 |
Использование: в машиностроении, а именно в непрограммируемых автооперато/ pax циклового действия, например, для автоматизации процесса загрузки-выгрузки технологического оборудования. Для получения траектории движения схвата с прямолинейными участками к кулисе 3 жестко присоединен стержень 17, на конце которого крепится схват 18. Модификация автооператора имеет стержень 17, который крепится параллельно кулисе 3 и на нем установлен ползун, кинематически связанный со схватом посредством своей клиновой поверхности. 1 з. п. ф-лы, 2 ил. .--Q XN
| Автооператор | 1989 |
|
SU1685675A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
