I
Изобретение относится к автоматике и может быть использовано в системах автоматического управления движе- нием угледобывающих комбайнов.
Известные способы коррекции систем автоматического управления движением объекта, основанные на введении корректирующего сигнала по ускорению движения в закон управления, преследуют цель срыва.автоколебаний движущегося объекта l . Однако существующие способы не учитывают естественного изменения структуры объекта в том.случае,, когда колебания вызваны влиянием нелинейной характеристики трения. Наиболее близким к изобретению по технической сущности и достигаемому результату является способ коррекции системы автоматического уп )авления движением объекта, основанный на сравнении сигнала уставки и сигнала коррекции; пропорционального производной от мгновенной скорости движения объекта, и формировании сигнала управления, пропорционального полученному сигналу рассогласования Гг. Этот способ рассматривает только условия стабилизации движения в фиксированной точке падающего учас ка нелинейной характеристики и не
учитывает всего диапазона ее измене-; ния (корректирующий сигнал не зависи от TeKsoAHX координат объекта) , что не позволяет выбирать параметры сие-, темы управления для конкретно рассматриваемого типа нелинейности с учетом ограниченных энергетических возможностей привода и требований к качеству регулирования. Ограниченные энергетические возможности привода требуют допустимых значений корректирующего сигнала и быстродействия системы по возможности ,без реверсирования исполнительного механизма.
Для уменьшения колебательности в процессе движения, т.е. повышения точности управления предлагается способ, заключающийся в том, что сигналы коррекции формируют в момент достижения мгновенной скоростью максимального значения и критического значения, соответствующего излому кривой трения в точке изменения знака коэффициента трения.
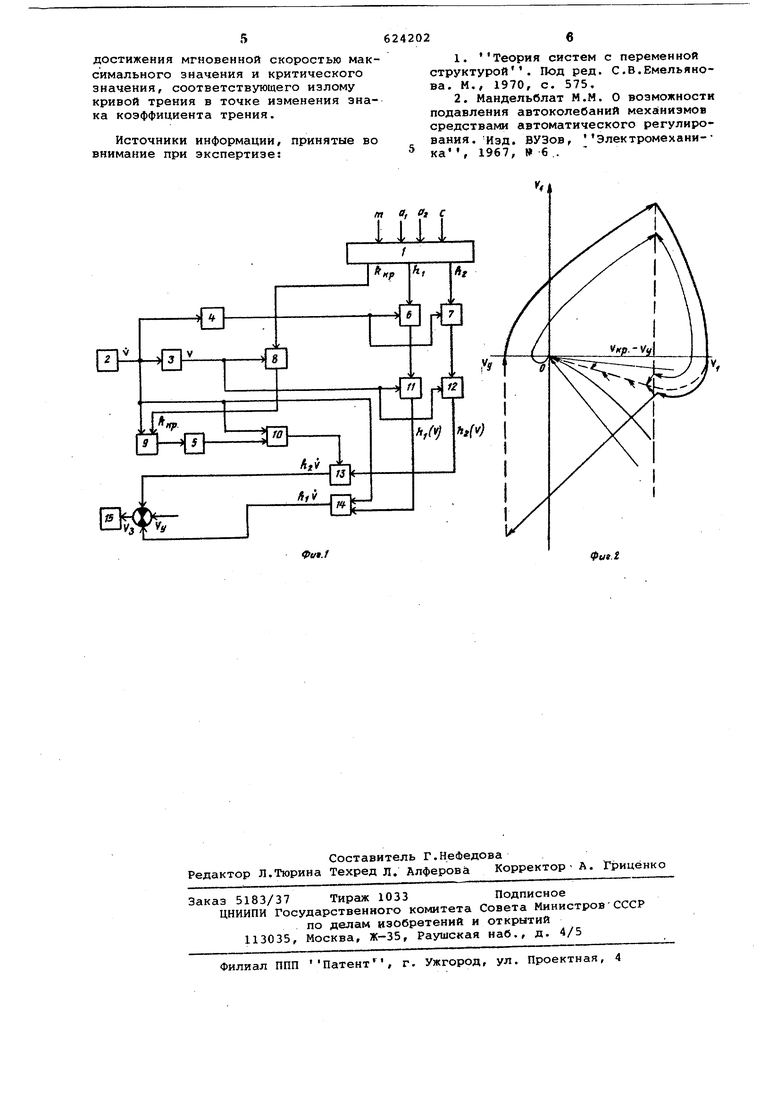
На фиг.1 представлена блок-схема устройства для реализации предлагаемого способа; на фиг.2 - фазовый портрет системы, формирующей корректирующий сигнал предлагаемым способом. На фазовом портрете (см. фиг.2) сплошной линией показано движение системы без управления, бписываемое, в частности, для угольного комбайна, ypasHeHi eM wV CJ,(V3-V)(V), .о где m - масса комбайна f С - коэффициент жесткости тяговой цепи; VjV - ускорение и скорость движения комбайна соответственно Vj, - скорость вращения приводной заезда механизма подачи; 1(У)- нелинейная характеристика трения (см.фиг.3). Пунктирной линией показано дйижение системы с управлением по закону 3 Vy-b7,; гдеУу- уставка скорости; h - параметр коррекции. Корректирующий параметр h опредег ляется в зависимости от знака коэффи циента трения в нелинейной характеристике и текущих координат объекта о, если ,Ke-. hijecAHV p V V a c-V O) hj.ecAH Блок-схема устройства (см.фиг.Г) включает в себя вычислитель 1, определяюсфкй параметры коррекции h |, (t 2; ()иа вход которого задаются W - масса комбайна о J h ся 2 -коэффищсенты характеристики трения с - ко эффициент, жесткости гибкого тяговог (фгана (для комбайна - цепь); датчик 2 ускорения, крепится на корпусе комбайна, с него напряжение пропорциональное ускорению движения подается на интегратор 3, выдающий сигнёш, пропорциональный мгновенной скорости движения объекта;, релейные элементы 4 и 5, пропускаюсдие только отрицательные сигналы ускорения движения; блоки б и 7 произведения, на входы которых поступают параметры hj, и текущие значения ускорения с релейного элемента 4, форкшрукнше корректирующие сигналы hiV и блок 8 перемножения, ф6 рмирукш1й 1 с игнал необходимый для обеспечения скользящего режима на интервале lif поступакадий на вход сумматора 9 вместе с сигналом с датчика ускорения; блок 10 произведения, обеспечива кпщй скользящий режим на интервале I ключи 11 и 12 формируют параметры коррекции h J (V) и 2(7} в заданных интервалах изменения скорости; блоки 13 и 14 произведения ца которые поступают сигналы fi2{V) KVj hi(V)HV соответственно, а с выходов этих бло ков снимаются сигналы ИjV и hjY; сравниваемые с уставкой Vy их разница поступает в управляемый элемент силового привода 15. Сигнал с датчика 2 поступает на нтегратор 3 для получения сигнала, ропорционального мгновенной скороси движения комбайна, который используется для управления ключами ц и 12, формирующими параметры корректирующего вoздeйcтвияlr(V)иhJl (V)B заданных интервалах изменения скорости. Эти сигналы формируются лишь при отрицательном ускорении, что достигается при помощи релейного элемента 4 и блоков б и 7, на которые с вычислителя 1 поступают сигналы параметров управления Itj и h Пс.раметр i и ускорение Y поступают на блок перемножения 14, с которого снимается корректирующий сигнал hv на интервале I npHY, ViYMoinc-nipaMeTp h j поступает на блок 13, формирующий скользящий режим управления на интервале И {О-tY- Yi/p) с помощью блока 8, на который с вычислителя 1 подается параметр скользящего режима k ,р, суйматора 9, релейного элемента 5 и блока 10. С сумматора 9 р 10 корректирующие сигналы bjv и }fzV передаются на сравнивающее устройство, где происходит сравнение с уставкой скорости. Отсюда сигнал коррекции подается в силовой привод подающей части, который, воздействуя на скорость приводной звезды, обеспечивает равномерное движение корпуса комбайна, на котором закреплен датчик ускорения. Использование предлагаемого способа коррекции обеспечивает уменьшение колебательности объекта и, по сравнению с существующими способами, дает возможность получать минимальные энергетические затраты на коррекцию движения объекта и исключает необходимость реверсирования силового привода. Уменьшение колебательности объекта-позволяет получать более выcoK5no среднюю скорость движения, что приводит, в частности, для угольного комбайна, к увеличению производительности. Кроме того, уменьшаются динамические нагрузки во всех узлах объекта И, следовательно, повышается его долгов.ечность. Формула изобретения Способ коррекции систем автоматического управления движением объекта, основанный на сравнении сигнала уставки и сигнсша коррекции, пропорционального производной от мгновенной скорости движения объекта, и формировании сигнала управления, пропорционального полученному сигналу рассогласования, отличающийся тем,что, с целью повышения точности управления, сигналы коррекции формируют в моменты 56242 достижения мгновенной скоростью максимального значения и критического значения, соответствующего излому кривой трения в точке изменения знака коэффициента трения. Источники информации, принятые во внимание при экспертизе: лт а, Ot с fчу 1 Jf 1.Теория систем с переменной структурой . Под ред. С.В.Емельянова. М., 1970, с. 575. 2.Мандельблат М.М. О возможности подавления автоколебаний механизмов средствами автоматического регулирования. Изд. ВУЗов, Электромехани- , 1967, 6 . ка 
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ стабилизации скорости подачи угольного комбайна | 1977 |
|
SU739233A1 |
| СПОСОБ И УСТРОЙСТВО ЭНЕРГОСБЕРЕГАЮЩЕГО ОБЕЗЗАРАЖИВАНИЯ КОРМОВ И ПРОДУКТОВ ЖИВОТНОВОДСТВА И ПТИЦЕВОДСТВА | 2012 |
|
RU2521712C2 |
| Способ стабилизации скорости подачи угольного комбайна и устройство для его реализации | 1984 |
|
SU1221343A1 |
| Устройство для управления приводом робота | 1987 |
|
SU1541554A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2586399C2 |
| Способ автоматической коррекции характеристик регулятора частоты электроэнергетического агрегата | 1981 |
|
SU1035769A1 |
| Регулятор температуры полосы на выходе стана горячей прокатки | 1977 |
|
SU716659A1 |
| Адаптивная система управления электромеханическим устройством торможения колеса | 2016 |
|
RU2643305C1 |
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092964C1 |
