Изобретение относится к области систем автоматического управления, в частности к технике формирования управляющих сигналов, и может найти применение в следящих системах автоматического управления и регулирования с люфтом в механической передаче.
Известен способ компенсации люфта в механической передаче, заключающийся в суммировании сигнала управления с сигналом коррекции, который формируют путем преобразования сигнала, пропорционального текущему значению люфта, в сигнал с тем же знаком и с постоянной амплитудой, равной полузоне люфта [1].
Недостатком данного способа является то, что точность компенсации люфта существенно зависит от точности установки коэффициента пропорциональности между текущим значением люфта и сигналом коррекции. Кроме того, этот способ коррекции, обеспечивая устойчивую работу разомкнутой системы, приводит обычно к значительному ухудшению точностных и динамических характеристик скорректированной следящей системы.
Известен способ автоматического управления, реализованный в следящей системе с люфтом, который выбран в качестве прототипа для заявляемого способа. Данный способ заключается в суммировании усиленного регулятором сигнала ошибки с сигналом коррекции, который формируют путем преобразования сигнала, пропорционального текущему значению люфта, в сигнал с тем же знаком и с постоянной амплитудой, равной полузоне люфта, и дифференцирования полученного сигнала [2].
Несмотря на то, что данный способ управления по формированию сигнала коррекции более удачен, чем предшествующий, однако он имеет те же недостатки: низкие значения точностных и динамических характеристик, так как и здесь точность компенсации люфта существенно зависит от точности установки коэффициента пропорциональности между текущим значением люфта и непродифференцированным сигналом, а также от точности установки коэффициентов дифференциатора. К тому же данное решение конструктивно трудно осуществить, так как передаточная функция дифференциатора должна быть обратной передаточной функцией двигателя.
Известно устройство для компенсации люфта, содержащее последовательно соединенные задатчик управляющего сигнала, первый сумматор, элемент типа "люфт", выход которого соединен с вычитающим входом второго сумматора, суммирующий вход которого соединен с выходом задатчика управляющего сигнала, выход второго сумматора через релейный элемент соединен с суммирующим входом первого сумматора [3].
Недостатком данного устройства является значительное ухудшение точностных и динамических характеристик скорректированной следящей системы из-за постоянного воздействия сигнала коррекции.
Известна следящая система с люфтом, которая взята в качестве прототипа для заявляемого устройства компенсации люфта в механической передаче. Данная следящая система с люфтом содержит последовательно соединенные измеритель рассогласования сигнала задания и сигнала единичной обратной связи, регулятор, первый сумматор, двигатель с датчиком угла, нелинейное звено типа "зона нечувствительности" - модель люфта и объект управления с датчиком угла, причем выходы датчиков угла двигателя и объекта управления связаны с входами второго сумматора, выход которого через последовательно соединенные нелинейный элемент типа "насыщение" и дифференциатор подключены к входу первого сумматора, при этом система охвачена отрицательной единичной обратной связью [2].
Однако данное устройство не обеспечивает требуемой точности и динамических характеристик следящей системы с люфтом из-за погрешности установки коэффициента пропорциональности между текущим значением люфта и непродифференцированным сигналом и погрешностей установки коэффициентов дифференциатора. К тому же данное решение конструктивно трудно осуществить, так как передаточная функция дифференциатора должна быть обратной передаточной функцией двигателя.
Задача изобретения - повышение точности компенсации люфта и улучшение динамических характеристик следящей системы путем более точного определения импульсного сигнала коррекции по длительности и форме в момент наличия люфта в механической передаче.
Данная задача решается тем, что в способе автоматического управления в системе с люфтом, при котором сигнал ошибки суммируют с импульсным сигналом коррекции в момент наличия люфта, сигнал коррекции формируют путем вычитания текущего значения люфта из сигнала, равного полузоне люфта и имеющего знак, совпадающий со знаком сигнала ошибки.
Данный способ может быть использован в любой следящей системе с люфтом для управления двигателем различного типа.
Предлагаемый способ реализуется в следящей системе с люфтом, содержащей измеритель рассогласования сигнала задания и сигнала единичной главной обратной связи, регулятор, первый сумматор, последовательно соединенные двигатель с датчиком угла, нелинейное звено типа "люфт" и объект управления с датчиком угла, выход которого соединен с вычитающим входом измерителя рассогласования, второй сумматор, один вход которого связан с выходом датчика угла двигателя, а второй вычитающий вход связан с выходом датчика угла объекта управления, нелинейное корректирующее звено типа "насыщение". В следящую систему дополнительно введен третий сумматор, первый вычитающий вход которого соединен с выходом второго сумматора, второй вход соединен с выходом нелинейного корректирующего звена, выполненного в виде релейного элемента, вход которого соединен с выходом измерителя рассогласования, соединенного также с первым входом первого сумматора, второй вход которого соединен с выходом третьего сумматора, а выход первого сумматора соединен через регулятор с двигателем.
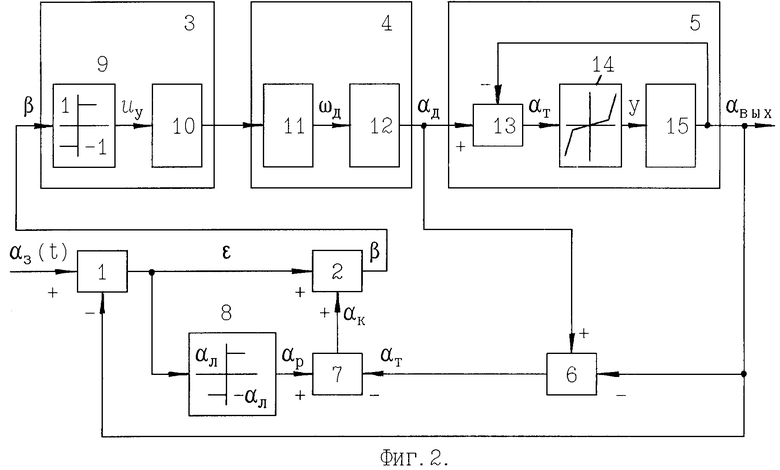
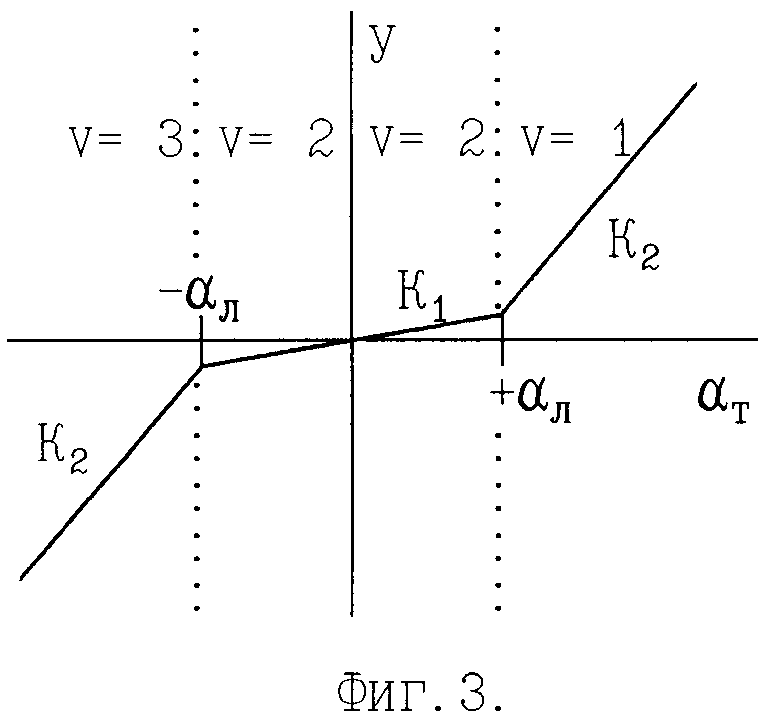
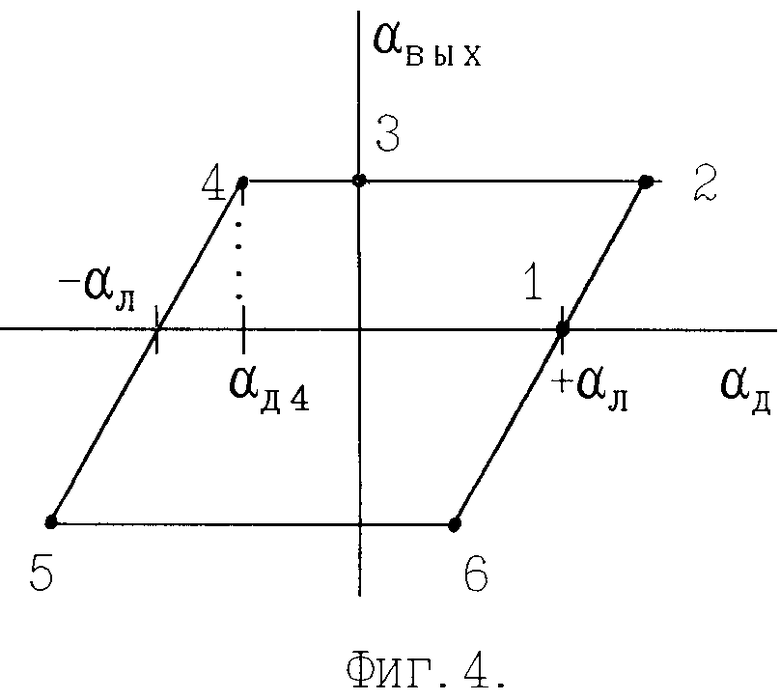
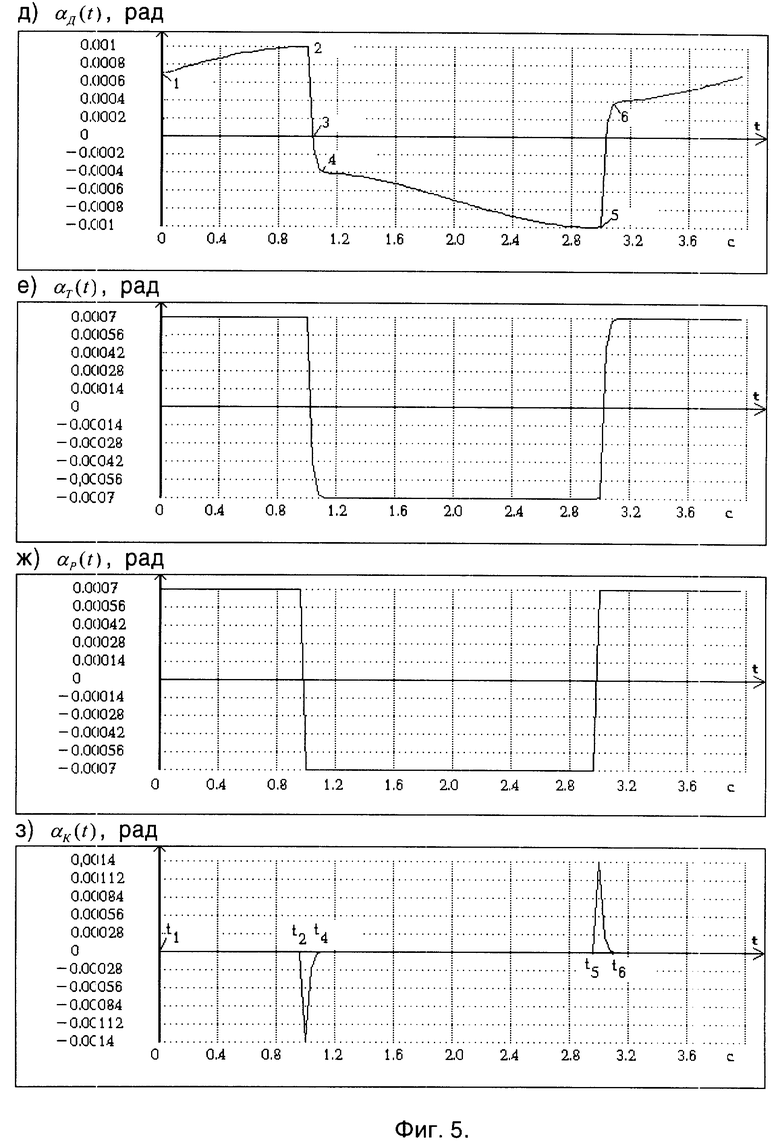
На фиг. 1 представлена структурная схема, реализующая способ автоматического управления в системе с люфтом; на фиг. 2 - пример структурной схемы следящей системы с люфтом; на фиг. 3 - характеристика нелинейного элемента с кусочно-линейной характеристикой, с помощью которого реализуется пример нелинейного звена типа "люфт"; на фиг. 4 - характеристика нелинейного звена типа "люфт"; на фиг. 5 приведены временные диаграммы работы следящей системы с люфтом, где:
а - диаграмма кривой задающего воздействия α3(t);
б - диаграмма кривой сигналов датчика угла нелинейного звена типа "люфт" и объекта управления αвых;
в - диаграмма кривой сигнала ошибки ε(t);
г - диаграмма кривой сигнала на входе регулятора β(t);
д - диаграмма кривой сигналов угла двигателя и датчика угла двигателя αд(t);
е - диаграмма кривой сигнала текущего значения люфта αт(t);
ж - диаграмма кривой сигнала на выходе нелинейного корректирующего звена, выполненного в виде релейного элемента αp(t), αp= αл•signε, где αл- - ширина полузоны люфта;
з - диаграмма кривой сигнала коррекции αк(t).
Система содержит последовательно соединенные измеритель рассогласования 1 сигнала задания и сигнала единичной главной обратной связи, первый сумматор 2, регулятор 3, двигатель 4 с датчиком угла, нелинейное звено типа "люфт" и объект управления 5 с датчиком угла, выход которого соединен с вычитающим входом измерителя рассогласования, второй сумматор 6, первый вход которого связан с выходом датчика угла двигателя 4, а второй вычитающий вход связан с выходом датчика угла объекта управления 5, третий сумматор 7, первый вычитающий вход которого соединен с выходом второго сумматора 6, второй вход соединен с выходом нелинейного корректирующего звена 8 типа релейного элемента, вход которого соединен с выходом измерителя рассогласования 1, соединенного также с первым входом первого сумматора 2, второй вход которого соединен с выходом третьего сумматора 7, а выход первого сумматора 2 соединен через регулятор 3 с двигателем 4.
В примере структурной схемы следящей системы с люфтом регулятор 3 реализован при помощи последовательно соединенного релейного элемента 9 и первого пропорционального звена 10, на вход которого поступает сигнал управления uу; двигатель 4 с датчиком угла состоит из последовательного соединения второго пропорционального звена 11 и первого интегратора 12, на вход которого поступает сигнал скорости двигателя ωд; нелинейное звено типа "люфт" и объект управления 5 с датчиком угла реализованы при помощи последовательно соединенного четвертого сумматора 13, нелинейного элемента 14 с кусочно-линейной характеристикой и второго интегратора 15, выход которого соединен с вычитающим входом четвертого сумматора, на вход линейного элемента 14 поступает сигнал текущего значения люфта αт.
Система работает следующим образом. Пусть начальное состояние следящей системы характеризуется точкой 1 (фиг. 4 и 5) при t - t1 и αз(t1) = 0. При замкнутом люфте в механической передаче и увеличении сигнала задающего воздействия αз (при движении системы "вверх" от точки 1 до точки 2 на интервале времени t1 - t2 угол αд на выходе двигателя 4 больше угла αвых объекта управления 5 точно на величину полузоны люфта (αд= αвых+αл, (фиг. 4), следовательно, текущее значение люфта на выходе второго сумматора 6 αт= αд-αвых равно полузоне люфта (αт= αл). Сигнал ошибки на выходе измерителя рассогласования 1 ε = αз-αвых> 0 и сигнал на выходе нелинейного корректирующего звена 8 типа релейного элемента αp= +αл, при этом сигнал коррекции αк= αp-αт равен нулю (αк= 0). Работает главная обратная связь следящей системы, и на вход регулятора 3 поступает сигнал с выхода первого сумматора 2 β = ε+αк равный сигналу ошибки (β = ε).
В момент времени t2 сигнал задающего воздействия αз достигает максимального значения и начинает уменьшаться, сигнал на выходе датчика угла объекта управления становится постоянным (фиг. 4, от точки 2 до точки 4), сигнал ошибки на выходе измерителя рассогласования 1 изменяет свой знак (ε = αз-αвых< 0), происходит реверс двигателя 4 и расцепление валов двигателя 4 и объекта управления 5 (вал нагрузки), вал двигателя 4 попадает в зону люфта, при этом главная обратная связь отключается и система оказывается разомкнутой и неуправляемой, что может привести к появлению автоколебаний. Для того, чтобы главная обратная связь не отключалась в момент наличия люфта (расцепления валов двигателя и нагрузки), на вход регулятора 3 подается импульсный форсирующий корректирующий сигнал, который формируют путем вычитания текущего значения люфта из сигнала равного полузоне люфта и имеющего знак, совпадающий со знаком сигнала ошибки (αк= αp-αт, αp= αл•signε), заставляющий вал двигателя 4 "прижиматься" к валу нагрузки 5.
В момент времени t4 происходит соединение валов двигателя 4 и объекта управления 5 и корректирующий сигнал вновь становится равным нулю.
При этом поведение скорректированной нелинейной следящей системы с люфтом по предложенному способу полностью совпадает с поведением линейной системы (без люфта), если пренебречь неточностью установки величины ограничения релейного элемента.
Для пояснения способа рассмотрим следующий пример (фиг. 2). В следящей системе используется в качестве двигателя 4 двигатель постоянного тока. Для простоты изложения, не влияющего на сущность изобретения, представим двигатель как безынерционное пропорциональное звено 11 с передаточной функцией Wд(p) = 1/(С • Ф), а датчик угла (идеальный, безлюфтовый редуктор) вместо интегрирующего звена с передаточной функцией WР(р) = KИ/р представим апериодическим звеном первого порядка с передаточной функцией WР(р) = KИ• TИ/(TИр + 1) при TИ → ∞. Здесь С и Ф - конструктивная постоянная и магнитный поток двигателя. KИ и TИ - коэффициент передачи и постоянная времени редуктора соответственно. Обозначим коэффициент пропорциональности звена 10 регулятора 3 как KП.
Из фиг. 3 следует, что коэффициент усиления Kv нелинейного элемента с кусочно-линейной характеристикой можно записать так: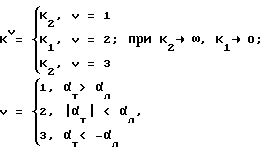
где v - номер участка рабочей характеристики нелинейного элемента с кусочно-линейной характеристикой (фиг. 3).
Согласно структурной схеме (фиг. 2) математическая модель разомкнутой системы без учета статической нагрузки имеет вид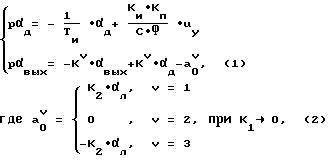
p - оператор дифференцирования.
Введем обозначения:
a11= 1/Tи; B1= Kи•Kп/(C•Ф); a
запишем уравнения (1) с учетом (3)
Основываясь на результатах работ Красовского А.А., запишем оптимальный закон управления uy, переводящий объект из начального состояния αд(0) = αд0, αвых(0) = αвых0 в конечное нулевое с минимальным значением функционала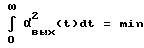 ,
,
при следующих ограничениях на управляющий сигнал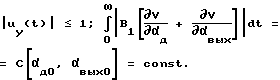
Здесь V - функция Ляпунова для неуправляемого uy(t) = 0 объекта 4. Для систем с одним управляющим воздействием оптимальный закон управления имеет вид
uy= -sign[B1(A
где функция Ляпунова - положительно определенная квадратичная форма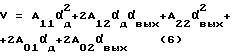
удовлетворяет следующему дифференциальному уравнению
Раскрывая производные и приводя подобные члены в (7) по координатам системы, получим систему алгебраических уравнений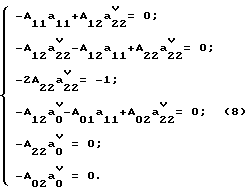
Из уравнений (8) найдем коэффициенты функции Ляпунова для двух случаев: вне зоны люфта (люфт замкнут, v = 1 или v = 3) при a11→ 0, a
Вне зоны люфта при v = 1 или v = 3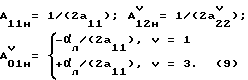
В зоне люфта при v = 2
A11л = 1/(2(a11); A12л = 1/(2(a11); A01л = 0. (10)
Из анализа соотношений (9 - 10) следует, что коэффициенты, входящие в алгоритм оптимального управления, стремятся либо к нулю, либо к бесконечности. Однако при релейном управлении важны не абсолютные значения этих коэффициентов, а знак выражения (5). На этом основании упростим выражение закона управления за счет вынесения за знак sign постоянного множителя B2A2, то есть потребуем единичной обратной связи по ближайшей к выходу системы координате αд. К сожалению единичную обратную связь по выходной координате αвых организовать невозможно из-за того, что коэффициент A
uy= -signβ; β = [K
где K11 = 1;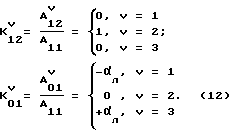
Вводя ступенчатое задающее воздействие, запишем оптимальный закон управления с учетом (12)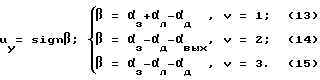
К сожалению, метод Красовского А.А. не учитывает условий перехода системы с одного участка рабочей характеристики нелинейного элемента с кусочно-линейной характеристикой (фиг. 3) на другой (из зоны работы вне люфта при v = 1 или v = 3 в зону люфта при v = 2), поэтому формулы закона управления вне люфта (13, 15) и в зоне люфта (14) оказываются не согласованы между собой.
При движении системы "вверх" от точки 1 до точки 2 (фиг. 4) на интервале времени t4 - t5 (фиг. 5) люфт замкнут, αд= αвых+αл (фиг. 4), v = 1 (фиг. 3) и оптимальное управление определяется формулой (13). В установившемся режиме при β = 0 из 13 следует, что αз= αд-αл или αз= (αвых+αл)-αл= αвых, то есть координата αвых повторяет задание αз на входе системы (αвых= αз). . В точке 2 при t = t6 (фиг. 4 и 5) сигнал задающего воздействия αз достигает максимального значения и начинает уменьшаться, происходит реверс двигателя 4 и система начинает движение "вниз". Валы двигателя 4 и объекта управления 5 (вал нагрузки) расцепляются, вал двигателя 4 попадает в зону люфта и оптимальное управление должно измениться в соответствии с формулой (14), из которой следует, что конечной точкой движения системы в зоне люфта является точка 3 (фиг. 4, 5) при αд= 0 (так как время перехода системы из точки 2 в точку 3 мало, можно считать, что за это время αвых остается равным αз или αвых= αз). Из фиг. 4 следует, что при управлении по формуле (14) система не может выйти из зоны люфта и будет ждать изменения задания на входе, то есть люфт окажется скомпенсирован неполностью.
Для согласования формул закона управления между собой и полной компенсации люфты, конечной точкой движения системы в зоне люфта при движении "вниз" должна быть точка 4 (фиг. 4), то есть заданием для координаты αд должен быть не нуль, (0 - αд) ) в законе управления (14), а (αд4-αд0, где αд4= αвых-αл.
Таким образом, оптимальное управление в зоне люфта (v = 2) при движении системы "вниз" на интервале времени t2 - t4 должно быть записано так:
Аналогично, при движении системы "вверх" в зоне люфта (v = 2) на интервале времени t5 - t6 оптимальное управление будет
uy= sign[αз+αл-αд].
Можно несколько иначе сформулировать оптимальный закон управления: при входе системы в зону люфта в момент реверса (точка 2, фиг. 5) и движении "вниз", из задания (αз+αл) необходимо вычитать 2αл (система переходит в точку 2, фиг. 5), а при входе системы в зону люфта в момент реверса (точка 5, фиг. 5) и движении "вверх" - к заданию (αз-αл) добавлять 2αл (система переходит в точку 5, фиг. 5):
Упростим оптимальное управление (16):
uy= sign[αз+(-1)nαл-αд], (17)
где
фиг. 4, где на участке от точки 5 через точки 6, 1 до точки 2 система движется "вверх", а на участке от точки 2 через точки 3, 4 до точки 5 - "вниз".
Рассмотрим первое условие (18): αт= αд-αвых> αл. При движении "вверх" для поддержания β = 0 из (17) следует, что αд= αз+αл и первое условие (18) можно записать так: αз-αвых> 0 или ε > 0. . Аналогично, при движении "вниз" αд= αз-αл и тогда второе условие (20) запишется как αл-αвых< 0 или ε < 0.
Существенным недостатком полученного оптимального управления (17) является отсутствие главной обратной связи по выходной координате αвых. Потребуем наличия в системе главной обратной связи, для этого добавим и вычтем αвых в (17) под знаком sign. После преобразований, учитывая, что uy= signβ, получим формулу способа автоматического управления в следящей системе с люфтом:
β = ε+αк, (19)
где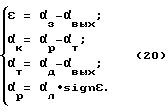
Физический смысл разработанного способа управления в системе с люфтом заключается во введении форсирующего корректирующего воздействия на регулятор 3 и двигатель 4; как только появляется рассогласование между сигналом, равным текущему значению люфта и сигналом, равным полузоне люфта и имеющим знак, совпадающий со знаком сигнала ошибки, на регулятор 3 и двигатель 4 поступает форсирующее корректирующее воздействие αк и он выбирает зону люфта практически мгновенно. Динамические характеристики следящей системы с люфтом с предложенным способом управления определяются характеристиками линейной системы без люфта.
Точность работы современных систем автоматического регулирования обычно ограничивается величиной зоны люфта механической передачи и объекта управления. Предлагаемый способ позволяет компенсировать люфт при любых величинах люфта и в любых системах, имеющих механические, гидравлические и пневматические передачи. Это повышает эффективность работы систем автоматического регулирования и расширяет их функциональные возможности.
Источники информации:
1. Авторское свидетельство N 531127, кл. G 05 B 05/01. // Житков В.Б., Лакота Н.А. и др. Способ компенсации люфта в механической передаче. Заявлено 24.07.76 (21) 2046992/24, опубл. 05.10.76. БИ N 37.
2. Авторское свидетельство N 521550, кл. G 05 B 11/01.//Житков В.Б., Лакота Н.А и др. Следящая система с люфтом. Заявлено 24.07.74 (21) 2046992/24, опубл. 05.10.76. БИ N 26.
3. Авторское свидетельство N 1104463 A, кл. G 05 B 05/01.// Герасимов В. А. , Кувшинов Г.Е., Малеев И.Г. Устройство для компенсации люфта. Заявлено 12.10.84 (21) 2833176/18-24, опубл. 23.07.84. БИ N 27.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2289154C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2296355C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2509328C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
| Устройство для предотвращения автоколебаний в следящей системе | 1982 |
|
SU1084722A1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| РЕЛЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2033988C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2001 |
|
RU2207489C2 |
Изобретение относится к области систем автоматического управления, в частности к технике формирования управляющих сигналов в системе с люфтом. Задачей изобретения является повышение точности компенсации люфта и улучшение динамических характеристик следящей системы. Отличительной особенностью способа является то, что при суммировании сигнала ошибки с импульсным сигналом коррекции в момент наличия люфта сигнал коррекции формируют путем вычитания текущего значения люфта из сигнала, равного полузоне люфта и имеющего знак, совпадающий со знаком сигнала ошибки. Следящая система с люфтом для осуществления способа содержит измеритель рассогласования сигнала задания и сигнала единичной главной обратной связи, регулятор, сумматоры, двигатель с датчиком угла, нелинейное звено типа "люфт" и объект управления с датчиком угла, нелинейное корректирующее звено типа "насыщение". 2 с.п. ф-лы, 5 ил.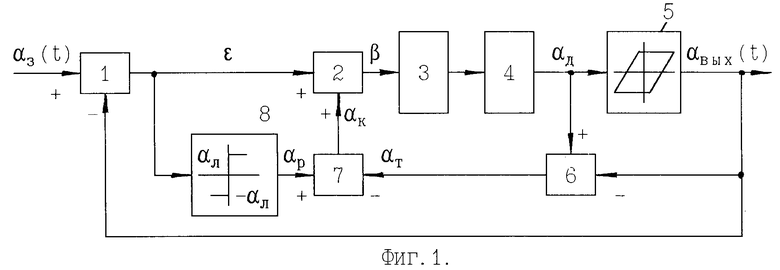
| SU, авторское свидетельство, 531127, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| SU, авторское свидетельство, 1104463, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| SU, авторское свидетельств о, 521550, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
