Изобретение относится к области электротехники и может быть использовано в замкнутых шаговых электроприводах /ШЭП/ с повышенной точностью поддержания мгновенной скорости шагового электродвигателя /ШЭД/.
Замкнутые структуры ШЭП обычно строятся на основе структур разомкнутого привода с добавлением цепей обратной связи для получения требуемых качественных показателей работы.
Известен способ программного управления ШЭП, в устройстве [1] в котором в дополнение к основному /фазовому/ каналу регулирования положения введен канал регулирования ускорения. Измеренное акселерометром значение ускорения сравнивается с программной установкой, а сигнал рассогласования корректирует исходную программу движения, воздействуя через регулятор на фазовый канал.
Недостатком известного способа является то, что использование одной локальной обратной связи по ускорению позволяет снизить динамическую ошибку лишь до известных пределов, так как для качественной коррекции в широком диапазоне работы регулятора нелинейной системы требуется перестройка его параметров в функции всех регулируемых координат.
Наиболее близким к предлагаемому является способ управления шаговым электродвигателем [2] состоящий в том, что измеряют скорость движения ротора, определяют соответствующую ей частоту коммутации, при разгоне коммутируют фазные обмотки двигателя с частотой, превышающей частоту, соответствующую измеренной скорости, вырабатывают напряжение, пропорциональное измеренной скорости, суммируют с заданной величиной, пропорциональной допустимому скачку скорости, для требуемой скорости вырабатывают пропорциональное ей напряжение, сравнивают его с результатом суммирования, и частоту коммутации фазных обмоток определяют по меньшей из сравниваемых величин.
Устройство для реализации этого способа, приведенное там же, содержит шаговый электродвигатель, распределитель импульсов, который связан через усилитель мощности с обмотками шагового электродвигателя, а в контуре регулирования скорости шагового электродвигателя установлен датчик скорости, измеряющий скорость движения ротора шагового электродвигателя и вырабатывающий пропорциональное ей напряжение, сумматор, вырабатывающий напряжение, равное сумме напряжения, пропорционального измеренной скорости, и заданного напряжения коррекции скорости, задающий блок, вырабатывающий напряжение, пропорциональное требуемой скорости, коммутатор, вырабатывающий напряжение, пропорциональное частоте коммутации фазных обмоток, по результату сравнения сигналов с задающего блока и сумматора, и преобразователь напряжение-частота коммутации, выход которого соединен с выходом распределителя импульсов.
Недостатком известного способа управления шаговым электродвигателем и устройстве, его реализующего, является низкая точность поддержания требуемой скорости шагового электродвигателя во всем диапазоне регулирования скорости, что объясняется использованием одной обратной связи по скорости, позволяющей стабилизировать скорость только при динамической ошибке, равной ±π/2 и использованием постоянного сигнала коррекции скорости.
Целью изобретения является повышение точности поддержания скорости шагового электродвигателя, а также расширение области применения устройства для шаговых электродвигателей с различными направлениями движения за счет введения регулирования скорости в зависимости от ускорения и динамической погрешности по положению.
Поставленная цель достигается тем, что в известном способе управления шаговым электродвигателем, состоящем в том, что измеряют скорость ротора двигателя и при разгоне и торможении коммутирует фазные обмотки с частотой, превышающей частоту измеренной скорости, дополнительно измеряют ускорение и разность между углами поворота вектора поля статора и поворота ротора двигателя, формируя по указанным величинам напряжение коррекции скорости по закону:
при положительном знаке ускорения напряжение, пропорциональное заданной скорости, уменьшают, а при отрицательном увеличивают на величину указанного напряжения, преобразуют его в скорректированную частоту коммутации фаз двигателя, при положительном результате сравнения измеренной и заданной скорости устанавливают частоту коммутации фаз двигателя равной максимально допустимой частоте, а при отрицательном скорректированной частоте, где: Иос напряжение коррекции скорости двигателя; δ,Ωo K1 - параметры двигателя, соответствующие внутреннему демпфированию, собственной частоте колебаний и дискрете угла поворота;  координаты двигателя, соответствующие углу поворота вектора поля статора, углу поворота ротора и угловой скорости.
координаты двигателя, соответствующие углу поворота вектора поля статора, углу поворота ротора и угловой скорости.
Кроме того, для реализации названного способа в известном устройстве управления шаговым электродвигателем, содержащим распределитель импульсов со счетчиком импульсов на входе и усилителем мощности на выходе, который имеет клеммы для подключения обмоток шагового электродвигателя, механически связанный с ним датчик скорости, блок задания частоты коммутации, первый выход которого соединен с первым информационным входом первого коммутатора, а второй через преобразователь частота-напряжение с первым входом первого сумматоре, преобразователь напряжение-частота, дополнительно введены датчик динамической погрешности и ускорения, функциональный преобразователь, выполненный с возможностью реализации функции dWoctg(γ-θ)/2K1 второй и третий сумматоры, первый и второй усилители, первый, второй и третий компараторы, первый логичный блок, реализующий функции  второй логический блок, реализующий функцию a f•H и b=f•H, второй коммутатор, при этом датчики динамической погрешности и ускорения механически связаны с двигателем, второй вход первого из которых соединен с клеммами для подключения обмоток двигателя, выход которого соединен с входом функционального преобразователя, выход которого соединен с вторым суммирующим второго сумматора, с первым суммирующим входом которого соединен выход первого усилителя, с входом которого соединен выход датчика скорости, соединенный также с вычитающим входом третьего сумматора, суммирующий вход которого соединен с выходом преобразователя частота напряжение, а выход с входом второго и третьего компараторов, выходы которых соединены с входами первого логического блока, выход второго компараторе соединен также с управляющим входом первого коммутатора, второй информационный вход которого соединен с выходом преобразователя напряжения- частота, вход которого соединен с выходом первого сумматора, второй суммирующий вход которого соединен с выходом второго коммутатора, один информационный вход которого соединен непосредственно, а другой через второй усилитель с выходом второго сумматора, а управляющий вход с выходом первого компаратора, вход которого соединен с выходом датчика ускорения, входы второго логического блока соединены с выходами первого коммутатора и первого логического блока, а его выходы соответственно с суммирующим и вычитающим входами счетчика, где d,Ωo K1 параметры двигателя, соответствующие внутреннему демпфированию, собственной частоте колебаний и дискрете угла поворота; γ, θ координаты двигателя, соответствующие углам поворота вектора поля статора и поворота ротора; H -логический сигнал о направлении счета управляющих импульсов, k логический сигнал о точности поддержания измеренной скорости двигателя относительно требуемой, b логический сигнал о знаке отклонения измеренной скорости двигателя относительно требуемой; f частота управляющих импульсов, а, в логические сигналы прохождения управляющих импульсов соответственно на суммирующий или вычитающий входы счетчика.
второй логический блок, реализующий функцию a f•H и b=f•H, второй коммутатор, при этом датчики динамической погрешности и ускорения механически связаны с двигателем, второй вход первого из которых соединен с клеммами для подключения обмоток двигателя, выход которого соединен с входом функционального преобразователя, выход которого соединен с вторым суммирующим второго сумматора, с первым суммирующим входом которого соединен выход первого усилителя, с входом которого соединен выход датчика скорости, соединенный также с вычитающим входом третьего сумматора, суммирующий вход которого соединен с выходом преобразователя частота напряжение, а выход с входом второго и третьего компараторов, выходы которых соединены с входами первого логического блока, выход второго компараторе соединен также с управляющим входом первого коммутатора, второй информационный вход которого соединен с выходом преобразователя напряжения- частота, вход которого соединен с выходом первого сумматора, второй суммирующий вход которого соединен с выходом второго коммутатора, один информационный вход которого соединен непосредственно, а другой через второй усилитель с выходом второго сумматора, а управляющий вход с выходом первого компаратора, вход которого соединен с выходом датчика ускорения, входы второго логического блока соединены с выходами первого коммутатора и первого логического блока, а его выходы соответственно с суммирующим и вычитающим входами счетчика, где d,Ωo K1 параметры двигателя, соответствующие внутреннему демпфированию, собственной частоте колебаний и дискрете угла поворота; γ, θ координаты двигателя, соответствующие углам поворота вектора поля статора и поворота ротора; H -логический сигнал о направлении счета управляющих импульсов, k логический сигнал о точности поддержания измеренной скорости двигателя относительно требуемой, b логический сигнал о знаке отклонения измеренной скорости двигателя относительно требуемой; f частота управляющих импульсов, а, в логические сигналы прохождения управляющих импульсов соответственно на суммирующий или вычитающий входы счетчика.
При этом в устройстве управления шаговым электродвигателем дополнительно введены блок выбора знака, первый, второй, третий и четвертый блоки модуля, причем между выходами датчика скорости и входом первого усилителя включен первый блок модуля, между выходом функционального преобразователя и вторым суммирующим входом второго сумматора включен второй блок модуля, между выходом третьего сумматора и входом второго компаратора четвертый блок модуля, между выходом первого сумматора и входом преобразователя напряжение- частота- третий блок модуля, между выходом преобразователя частота- напряжение и первым суммирующим входом первого сумматора блок выбора знака, управляющий вход которого соединен с дополнительным выходом блока задания частоты и дополнительным входом первого логического блока, реализующего функцию 
где
a логический сигнал, характеризующий направление движения двигателя.
Введение дополнительных операций по измерению и обработке сигналов ускорения и разности углов поворотов вектора поля статора и ротора в заявленном способе позволяет уменьшить колебания скорости шагового электродвигателя от заданной величины за счет использования переменного сигнала коррекции скорости, который, во-первых, определяется из минимума отклонений скорости, во-вторых, демпфирует колебания скорости, так как уменьшает частоту управляющих импульсов при положительном знаке ускорения двигателя и увеличивает ее при отрицательном знаке ускорения двигателя, причем за счет использования максимально допустимой частоты управляющих импульсов двигателя имеет высокое быстродействие в переходных режимах разгона и торможения.
Дополнительно введенные в устройство блоки позволяют получить полную информацию о состояниях шагового электродвигателя /датчик динамической погрешности и датчик ускорения/, оценить отклонения текущих координат от заданных /второй и третий компараторы, первый и второй логические блоки, третий сумматор/ и на этой основе выработать необходимые управляющие воздействия /первый и второй усилители, функциональный преобразователь, первый компаратор, второй коммутатор и второй сумматор/ в удобной для реализации структуре устройства и форме сигналов.
Введение первого, второго, третьего и четвертого блоков модуля, блока выбора знака позволяет придать универсальность структуре управляющего устройства для технической реализации предлагаемого способа управления ШЭД вне зависимости от направления перемещения двигателя.
На фиг. 1 показаны траектории и переходные процессы в шаговом электроприводе, поясняющие работу предлагаемого способа; на фиг.2 - структурная схема шагового электропривода, иллюстрирующая реализацию способа; на фиг.3 таблица истинности работы первого логического блока в структуре, показанной на фиг.2; на фиг.4 структурная схема шагового электропривода для реализации предлагаемого способа при различных направлениях движения ШЭД; на фиг.5,6 соответственно таблица истинности и карта Карно, поясняющие работу первого логического блока в структуре фиг.4.
Методической основой предлагаемого способа управления ШЭД являются результаты решения задачи оптимального управления ШЭД на минимум отклонений скорости с помощью принципа максимума /см. книгу Л.С.Понтрягина, В.Г.Болтянского, P.В.Гамкрелидзе, Е.Ф.Мищенко "Математическая теория оптимальных процессов". М. Наука, 1961/.
Дискретный ШЭД может быть описан при питании его фаз от источника тока либо при значительном моменте инерции привода аналоговой моделью в виде обыкновенного нелинейного дифференциального уравнения второго порядка /см. книгу Б. А.Ивоботенко, В.Ф.Козаченко "Шаговый привод в робототехнике". М. изд. МЭИ,1984,с.100/
где
θ угол поворота ротора ШЭД,
g задающий угол поворота вектора поля статора ШЭД,
mc относительное значение момента сопротивления, имеющего реактивный характер, т.е.
Ωo, δ - соответственно собственная частота колебаний и безразмерное внутреннее демпфирование ШЭД.
Для решения оптимальных задач математическое описание /1/ с учетом того, что задающий угол поворота вектора поля статора γ изменяется по интегральному закону от частоты управляющих импульсов f, приводится к нормальной форме в виде системы обыкновенных дифференциальных уравнений третьего порядка 
переменные которой обозначают: координаты x1= γ, x2= θ, x3 характеризует скорость двигателя, т.е.  К параметр двигателя, соответствующий дискрете угла поворота; ограниченное по амплитуде управление Umax≅U≅+Umax соответствует частоте управляющих импульсов f.
К параметр двигателя, соответствующий дискрете угла поворота; ограниченное по амплитуде управление Umax≅U≅+Umax соответствует частоте управляющих импульсов f.
При релейном управлении реальным ШЭД, содержащим на входе распределитель импульсов, включающий счетчик и дешифратор, управление U Umax соответствует частоте управляющих импульсов Fmax, поступающих на вычитающий вход счетчика распределителя импульсов, т.е. знак сигнала управления U соответствует направлению счета в счетчике распределителя импульсов и соответственно направлению вращения или перемещения ШЭД, а частоту управляющих импульсов f при известном аналоговом сигнале управления U можно получить с помощью преобразователя напряжение- частота.
ШЭП находит широкое применение в системах числового программного управления станками и роботами. В контурных системах числового программного управления основным требованием к приводу является поддержание постоянства скорости, что математически соответствует задаче минимизации отклонений скорости ШЭД с критерием
Граничные условия в задаче на минимум отклонений скорости /2,3/ - начальное  и конечное
и конечное  задаются на статистических характеристиках ШЭД по скорости, полученных из уравнений /1/ или /2/ при
задаются на статистических характеристиках ШЭД по скорости, полученных из уравнений /1/ или /2/ при  которыми является семейство прямых
которыми является семейство прямых
Ω
показанное на фиг.1, а прямыми S(1) для случая  и прямыми S(2) для случая
и прямыми S(2) для случая 
Задача /2,3/линейна по управлению, поэтому согласно принципу максимума оптимальным является кусочно-постоянное управление с максимально возможными амплитудами:
Однако ввиду того, что задача /2,3/ с линейным управлением нелинейна по координатам, в ней возможно существование особого режима при  когда принцип максимума не позволяет однозначно определить оптимальное управление через вспомогательную переменную Ψ1 Для анализа существования и вычисления особого управления в задаче /2,3/ применим аппарат условий общности положения для нелинейных объектов в расширенном пространстве координат размеренности (n+1) (см. статью В. С.Хорошавина "Вычисление и реализация особых траекторий в нелинейных оптимальных задачах". Деп. в ВИНИТИ 22.04.88, N 3115-В88/. Дополнительная координата Xo учитывает подинтегральное выражение в функционале /3/ по уравнению
когда принцип максимума не позволяет однозначно определить оптимальное управление через вспомогательную переменную Ψ1 Для анализа существования и вычисления особого управления в задаче /2,3/ применим аппарат условий общности положения для нелинейных объектов в расширенном пространстве координат размеренности (n+1) (см. статью В. С.Хорошавина "Вычисление и реализация особых траекторий в нелинейных оптимальных задачах". Деп. в ВИНИТИ 22.04.88, N 3115-В88/. Дополнительная координата Xo учитывает подинтегральное выражение в функционале /3/ по уравнению 
Задача /2,3/ в расширенном пространстве координат записывается в векторно-матричной форме
где
Выполнение условий общности положения определяется по детерминанту матрицы D4, составленной из векторов Bj вычисленных по рекуррентному соотношению
вычисленных по рекуррентному соотношению
После вычисления векторов Bj составляет матрица D4 с элементами bjk,
составляет матрица D4 с элементами bjk,  векторов Bj
векторов Bj
где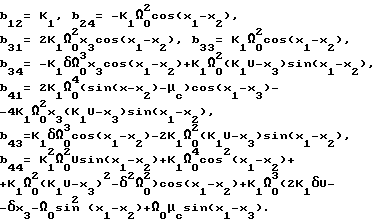
Детерминант матрицы D4 определяется выражением
из которого следует, что в поставленной задаче /2,3/ условия общности положения не выполняются на множестве особых траекторий, полученных путем приравнивания нулю det D4:
Для нахождения особого управления, реализующего особые траектории, можно воспользоваться следующими путями:
1/ совместно решить уравнения движения объекта /2/ и уравнения особых траекторий /6/,
2/ вычислить по соотношению /5/ дополнительный вектор B5, а особое управление найти из детерминантов матриц 
3/ приравнять нулю элементы векторов Bj с подстановкой в них уравнений особых траекторий /6/.
с подстановкой в них уравнений особых траекторий /6/.
Все пути дают одинаковые результаты, но меньшие вычислительные затраты имеет последний путь.
Первая особая траектория в /6/ x1-x2= ±π/2 или в физических обозначениях γ-θ = ±π/2 реализуется особым управлением (7)
(7)
которое соответствует введению обратной связи по скорости ШЭД.
Второе множество особых траекторий /6/ соответствует уравнениям статистической характеристики ШЭД по скорости /4/ при  которые реализуются особым управлением
которые реализуются особым управлением
Отметим, что первая особая траектория в /6/ является частным случаем второго множества особых траекторий в /6/, получаемой для максимальной скорости ШЭД, а особое управление /7/, реализующее первую особую траекторию, является частным случаем особого управления /8/, реализующего второе множество особых траекторий для произвольной скорости ШЭД. В предлагаемом способе управления ШЭД используется особое управление общего вида /8/.
Физически полученные особая траектория /6/ и особое управление /8/ означает, что минимизации колебаний скорости ШЭД необходимы обратные связи по скорости  ускорению
ускорению  и динамической погрешности по положению (γ-θ)
и динамической погрешности по положению (γ-θ)
Фазовые траектории ШЭД при оптимальном управлении не минимум отклонений скорости с включением интервалов релейного и особого управлений и различных знаков скорости показаны на фиг.1,б. Разгон и торможение ШЭД производится под действием релейного управления с максимально допустимыми амплитудами +Umax или -Umax. При вхождении скорости ШЭД, измеренной датчиком скорости, в заданную зону стабилизации скорости ε определяемой как модуль разности измеренной скорости  и заданной конечной скорости
и заданной конечной скорости  т.е. при
т.е. при  максимально допустимое управление отключается. При этом получается максимальное значение скорости, а ускорение будет равно нулю, т.е. происходит выход на особую траекторию
максимально допустимое управление отключается. При этом получается максимальное значение скорости, а ускорение будет равно нулю, т.е. происходит выход на особую траекторию  а управление ШЭД происходит в дальнейшем под действием особого управления /8/. Моделированием системы с релейным и особым управлениями /фиг.1,в/ установлено, что для уменьшения колебаний скорости с использованием особого управления необходимо изменять знак особого управления в зависимости от знака ускорения ШЭД, измеряемого датчиком ускорения /акселерометром/ в соответствии с условием
а управление ШЭД происходит в дальнейшем под действием особого управления /8/. Моделированием системы с релейным и особым управлениями /фиг.1,в/ установлено, что для уменьшения колебаний скорости с использованием особого управления необходимо изменять знак особого управления в зависимости от знака ускорения ШЭД, измеряемого датчиком ускорения /акселерометром/ в соответствии с условием
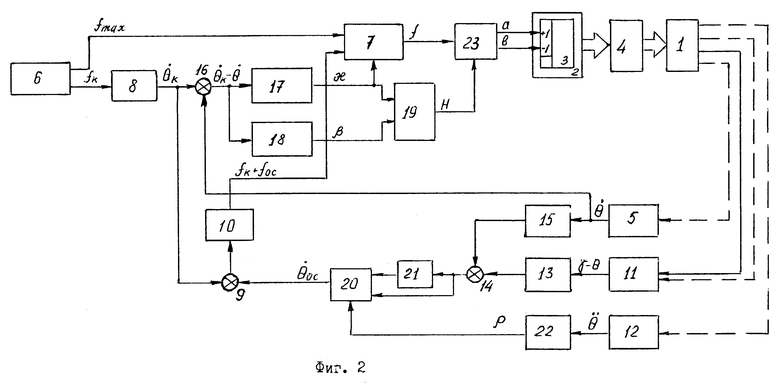
На фиг. 2 приведена структурная схема ШЭП для реализации предлагаемого способа в случае одного направления вращения шагового электродвигателя.
Устройство для управления шаговым электродвигателем 1 содержит распределитель 2 импульсов со счетчиком 3 импульсов на входе и усилитель 4 мощности на выходе, который имеет клеммы для подключения обмоток шагового электродвигателя 1, механически связанный с ним датчик 5 скорости, блок 6 задания частоты коммутации, первый выход которого соединен с первым информационным входом первого коммутатора 7, а второй через преобразователь 8 частота-напряжение с первым входом первого сумматора 9, преобразователь 10 напряжение-частота, датчики динамической погрешности 11 и ускорения 12, механически связанные с двигателем 1, второй вход датчика 11 динамической погрешности соединен с клеммами для подключения обмоток двигателя 1, выход датчика 11 соединен с входом функционального преобразователя 13, выход которого соединен с вторым суммирующим входом второго сумматора 14, с первым суммирующим входом которого соединен выход первого усилителя 15, со входом которого соединен выход датчика 5 скорости, соединенный также с вычитающим входом третьего сумматора 16, суммирующий вход которого соединен с выходом преобразователя 8 частота-напряжение, а выход с входом второго 17 и третьего 18 компараторов, выходы которых соединены со входами первого логического блока 19, выход второго компаратора 17 соединен также с управляющим входом первого коммутатора 7, второй информационный вход которого соединен с выходом преобразователя 10 напряжение-частота, вход которого соединен с выходом первого сумматора 9, второй суммирующий вход которого соединен с выходом второго коммутатора 20, один информационный вход соединен непосредственно, а другой через второй усилитель 21 с выходом второго сумматора 14, а управляющий вход с выходом первого компаратора 22, вход которого соединен с выходом датчика 12 ускорения, входа второго логического блока 23 соединены с выходами первого коммутатора 7 и первого логического блока 10, а его выходы соответственно с суммирующим и вычитающим входами счетчика 3 импульсов.
В устройстве реализуется переменная структура управляющего устройства по отклонению текущего значения скорости ШЭД с пропорциональным ему напряжением  вырабатываемым датчиком 5 скорости, от заданного конечного значения скорости с пропорциональным ему напряжением
вырабатываемым датчиком 5 скорости, от заданного конечного значения скорости с пропорциональным ему напряжением  вырабатываемым преобразователем 8 частота-напряжение по значениям частоты импульсов fk, соответствующей заданной скорости ШЭД 1 и снимаемой с второго выхода блока 6 задания частоты коммутации. Частота управляющих импульсов f ШЭД 1 вырабатывается первым коммутатором 7 в зависимости от значения логического сигнала κ снимаемого с второго компаратора 17
вырабатываемым преобразователем 8 частота-напряжение по значениям частоты импульсов fk, соответствующей заданной скорости ШЭД 1 и снимаемой с второго выхода блока 6 задания частоты коммутации. Частота управляющих импульсов f ШЭД 1 вырабатывается первым коммутатором 7 в зависимости от значения логического сигнала κ снимаемого с второго компаратора 17
где
fmax максимально допустимая частота управляющих импульсов ШЭД 1, вырабатываемая блоком 6 задания частоты коммутации, используемая при разгоне и торможении ШЭД 1,
κ логический сигнал, определяемый вторым компаратором 17 в зависимости от заданной точности e поддержания скорости  относительно требуемой
относительно требуемой 
при этом разность  определяется третьим сумматором 16,
определяется третьим сумматором 16,
fk+foc частота управляющих импульсов ШЭД 1, равная сумме частоты fk, соответствующей скорости, и частоты коррекции скорости foc, вырабатываемая преобразователем 10 напряжение- частота, соответствующая сумме напряжения  пропорционального требуемой скорости, и напряжения коррекции
пропорционального требуемой скорости, и напряжения коррекции  которая получается первым сумматором 9.
которая получается первым сумматором 9.
Напряжение коррекции скорости  вырабатывается вторым коммутатором 20 по условию
вырабатывается вторым коммутатором 20 по условию
где
Uoc напряжение коррекции скорости, снимаемое со второго сумматора 14, которое вырабатывается в соответствии с уравнением особого управления /8/ с помощью первого усилителя 15 с выходным сигналом  и функционального преобразователя 13 с выходным сигналом δΩ0ctg(γ-θ)/2K1 входное напряжение которого (γ-θ) определяется датчиком динамической погрешности 11 по выходным сигналам ШЭД 1.
и функционального преобразователя 13 с выходным сигналом δΩ0ctg(γ-θ)/2K1 входное напряжение которого (γ-θ) определяется датчиком динамической погрешности 11 по выходным сигналам ШЭД 1.
Сигнал Uoc получается путем инвертирования сигнала Uoc вторым усилителем 21. Для получения сигнала  знак сигнала Uoc вырабатывается по уравнению /9/ в зависимости от знака напряжения
знак сигнала Uoc вырабатывается по уравнению /9/ в зависимости от знака напряжения  пропорционального ускорению ШЭД 1, которое измеряется датчиком ускорения /акселерометром / 12. Знак сигнала
пропорционального ускорению ШЭД 1, которое измеряется датчиком ускорения /акселерометром / 12. Знак сигнала  определяется первым компаратором 22 с выходным сигналом r равным
определяется первым компаратором 22 с выходным сигналом r равным
Поступление управляющих импульсов частотой F на суммирующий /а/ или /в/ входы счетчика 3 распределителя 2 импульсов определяется вторым логическим блоком 23 в соответствии с уравнением b f•H,
b f•H,
где
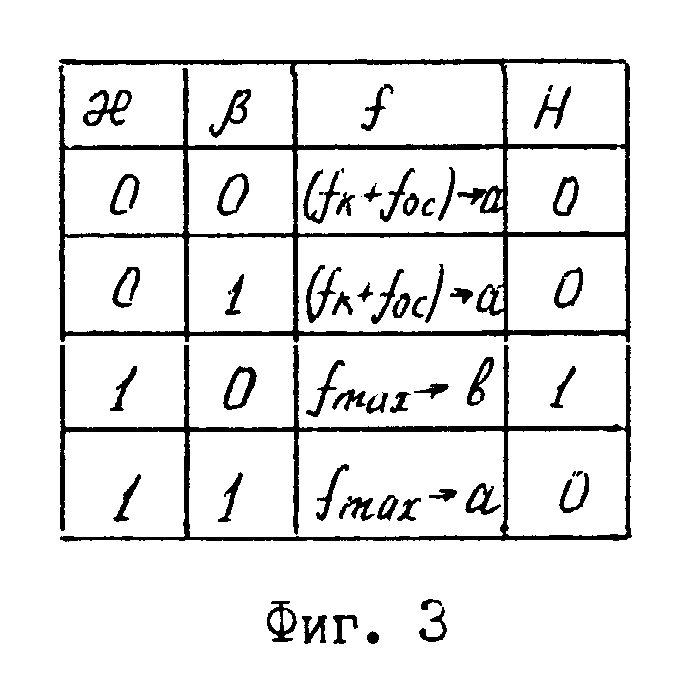
H сигнал направления счкета, вырабатываемой первым логическим блоком 19 по сигнвалу κ от второго компаратора о вхождении скорости ШЭД 1 в зону стабилизации скорости e и сигналу b от третьего компаратора 18, о знаке отклонения текущей скорости Q от требуемой Qk
Первый логический блок 19 реализует лигическую функцию
которая получается из таблицы истинности, показанной на фиг. 3.
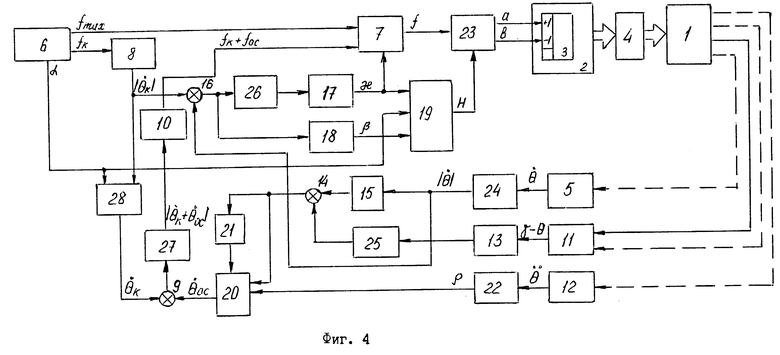
На фиг. 4 приведена структурная схема одного из вариантов шагового электропривода с использованием заявляемого способа в случае различных направлений движения ШЭД позволяющего расширить область применения. Для этого в устройстве для управления ШЭД дополнительно введены первый 24, второй 25, третий 27 и четвертый 26 блоки модуля, позволяющие из знакопеременных сигналов получить положительно определенные сигналы, блок 28 выбора знака, позволяющий выбрать знак сигнала требуемой скорости  по условию
по условию
где
α логический сигнал, снимаемый с третьего выхода блока 6 задания частоты коммутации, характеризующий направление движения ШЭД 1 и равный
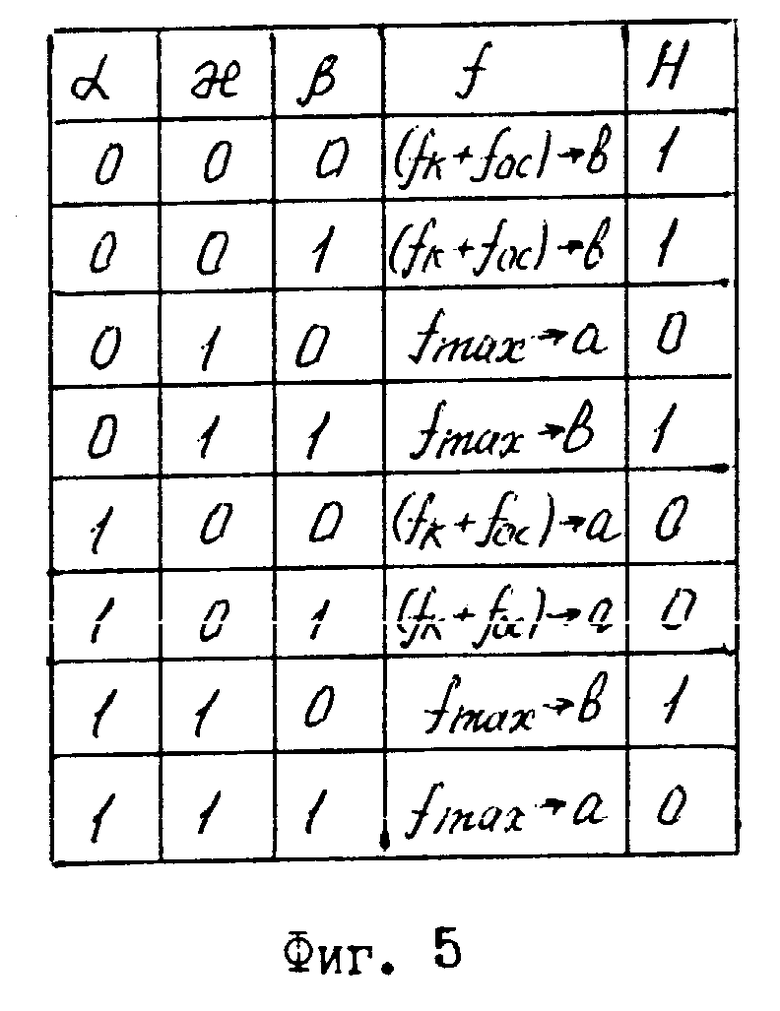
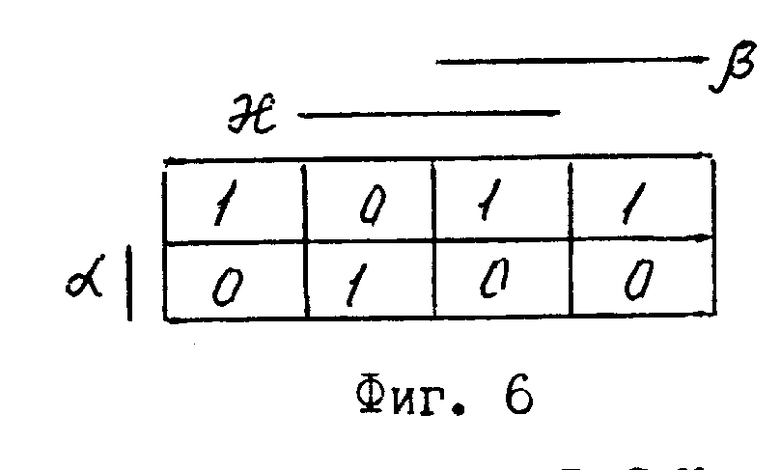
Сигнал направления счета H, сжимаемый с выхода первого логического блока 19, определяется по сигналам α, κ, β вырабатываемым соответственно блоком 6 задания частоты коммутации, вторым 17 и третьим 18 компараторами в соответствии с логическим уравнением
которое получается из таблицы истинности /фиг.5/ и карты Карно /фиг.6/.
Применение предлагаемого способа и устройства управления ШЭД позволяет увеличить точность поддержания скорости и быстродействие ШЭД, уменьшить динамические погрешности ШЭД, тем самым повысить производительность и качество продукции, выпускаемой на оборудовании с ШЭП, например, на стенках с числовым программным управлением.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1987 |
|
SU1458960A2 |
| Электропривод постоянного тока | 1986 |
|
SU1394385A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Устройство для программного управления процессом обработки изделий микроэлектроники | 1986 |
|
SU1386962A1 |
| Устройство для управления шаговым электродвигателем с дроблением шага | 1987 |
|
SU1417162A1 |
| Цифровой следящий привод | 1978 |
|
SU734607A1 |
| Устройство для измерения ошибок позиционирования шагового электродвигателя | 1990 |
|
SU1697254A1 |
| Электропривод постоянного тока | 1989 |
|
SU1697239A1 |
| Устройство для управления вентильным электродвигателем | 1987 |
|
SU1443113A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
Использование: в замкнутых, шаговых электроприводах с повышенной точностью поддержания мгновенной скорости. Сущность: в устройстве реализуется переменная структура регулирования по отклонению текущего значения скорости с пропорциональным ему напряжением, вырабатываемым датчиком скорости от заданного конечного значения скорости с пропорциональным ему напряжением, вырабатываемым преобразователем частоты напряжения по значениям частоты импульсов, соответствующей заданной скорости и снимаемой с выхода задающего блока. Частота управляющих импульсов вырабатывается коммутатором в зависимости от значения логического сигнала второго коммутатора, разность определяется сумматором, напряжения коррекции скорости - вторым коммутатором. Знак сигнала напряжения скорости, определяемый знаком ускорения, является выходным сигналом компаратора. Поступление управляющих импульсов на входы счетчика распределителя импульсов определяется вторым логическим блоком. 2 с.п. ф-лы, 6 ил.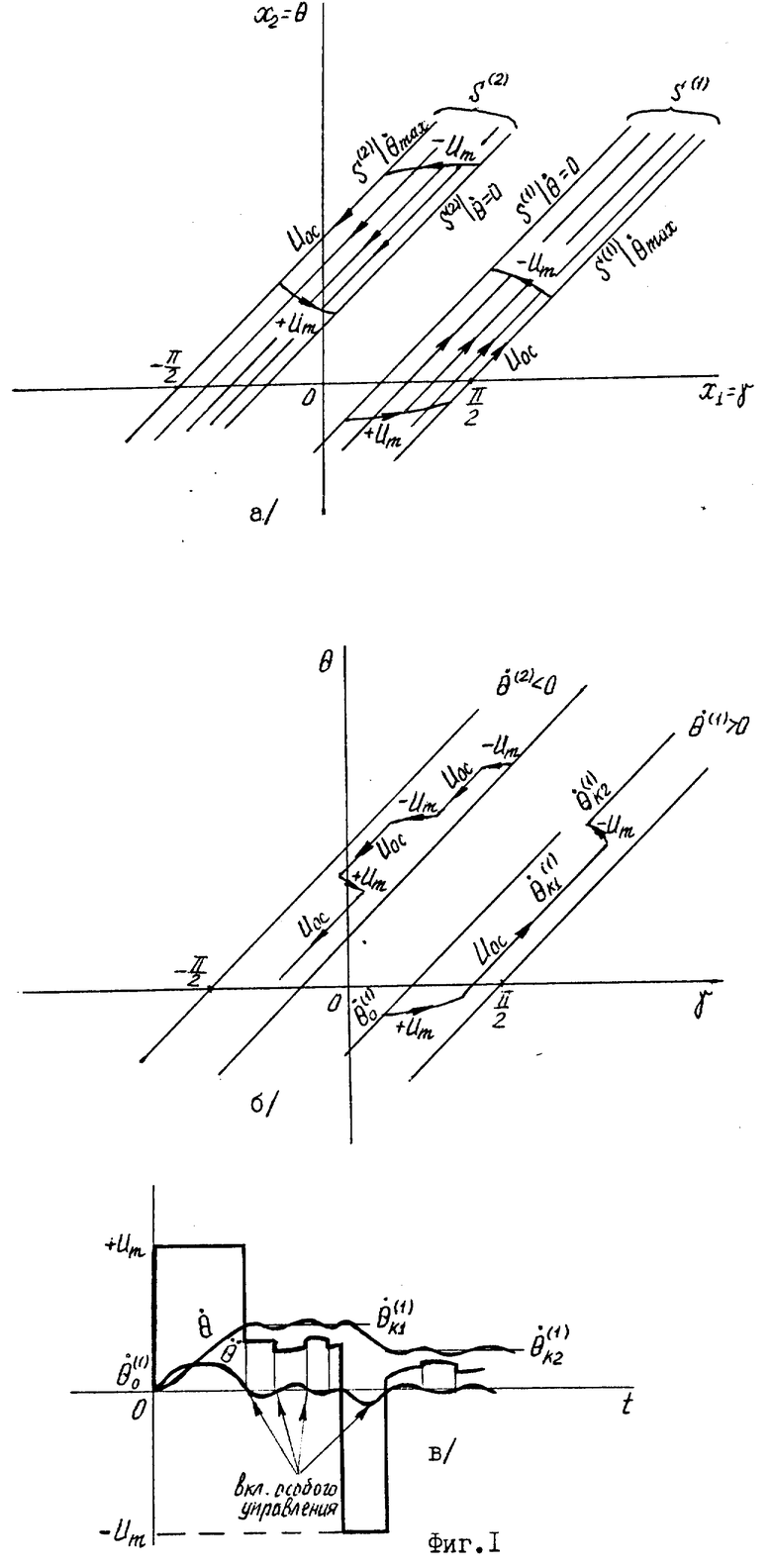
где Uос напряжение коррекции, соответствующее скорости двигателя;
δ, Ωo, K1 - параметры двигателя, соответствующие внутреннему демпфированию, собственной частоте колебаний и дискрете угла поворота; координаты двигателя, соответствующие углу поворота вектора поля статора, углу поворота ротора и угловой скорости,
координаты двигателя, соответствующие углу поворота вектора поля статора, углу поворота ротора и угловой скорости,
при положительном знаке ускорения напряжение, пропорциональное заданной скорости, уменьшают, а при отрицательном увеличивают на величину указанного напряжения, преобразуют его в скорректированную частоту коммутации фаз двигателя, при положительном результате сравнения измеренной и заданной скоростей устанавливают частоту коммутации фаз двигателя, равной максимально допустимой частоте, а при отрицательном скорректированной частоте. выход второго компаратора соединен также с управляющим входом первого коммутатора, второй информационный вход которого соединен с выходом преобразователя напряжение частота, вход которого соединен с выходом первого сумматора, второй суммирующий вход которого соединен с выходом введенного второго коммутатора, один информационный вход которого соединен непосредственно, а другой через введенный второй усилитель с выходом второго сумматора, а управляющий вход - с выходом введенного первого компаратора, вход которого соединен с выходом датчика ускорения, входы введенного второго логического блока, реализующего функцию
выход второго компаратора соединен также с управляющим входом первого коммутатора, второй информационный вход которого соединен с выходом преобразователя напряжение частота, вход которого соединен с выходом первого сумматора, второй суммирующий вход которого соединен с выходом введенного второго коммутатора, один информационный вход которого соединен непосредственно, а другой через введенный второй усилитель с выходом второго сумматора, а управляющий вход - с выходом введенного первого компаратора, вход которого соединен с выходом датчика ускорения, входы введенного второго логического блока, реализующего функцию
соединены с выходами первого коммутатора и первого логического блока, а его выходы соответственно с суммирующим и вычитающим входами счетчика,
где δ, Ωo, K1 - параметры двигателя, соответствующие внутреннему демпфированию, собственной частоте колебаний и дискрете угла поворота;
γ, θ - координаты двигателя, соответствующие углам поворота вектора поля статора и поворота ротора;
Н логический сигнал о направлении счета управляющих импульсов;
κ - логический сигнал о точности поддержания измеренной скорости двигателя относительно требуемой;
β - логический сигнал о знаке отклонения измеренной скорости;
f частота управляющих импульсов соответственно на суммирующий "а" или вычитающий "b" входы счетчика.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| John A | |||
| Tenogli | |||
| A high quality X-Y plotter flexability and low cost | |||
| Hewlett Packard Company | |||
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР N 1485375, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
