(54) РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| ИНТЕГРИРОВАННАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2321020C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| Устройство для регулирования силовых параметров и рабочей подачи процесса резания | 1985 |
|
SU1270744A1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОМЕРНЫМ ОБЪЕКТОМ | 2010 |
|
RU2446299C1 |
| Устройство для регулирования влажности глиняного бруса однодвигательного пресса | 1980 |
|
SU896599A1 |
| Система автоматического управления периодическим процессом ферментации | 1986 |
|
SU1399342A1 |
| Нагрузочное устройство для испытания генератора электростанций переменного тока | 1976 |
|
SU736339A1 |
Изобретение отассится к системам автоматичесжого регулирования и предназначено для регулирования динамических объектов, в частности объектов с большими запаздываниями подверженных глубоким возмущениям.
Известны регулирующие устройства, предназначенные для регулирования таких объектов. Эти регулирующие устройства содержат либо нелинейные коррек- тирующие устройства 1J , либо их структуру и настройку изменяют в зависимости от вепич.инь оессогласования 2j. Однако ОНИ пибо1не обеспечивают необходимог качества регулирования, либо достаточно сложны.
Известно также устройство, содержащее последовательно соединенные блок сравнения, усилитель и привод, блок коррекции, подключенный ко входу блока сра нения, и коммутатор З.
В этом устройстве необходимое катаство регулирования достигается за счет ограничения выходной координаты, однако это приводит к увеличению времени переходного процесса, которое в ряде случаев является доминирующим показателем качества процесса регулирования. Кроме того, оно содержит дифференциатор, наличие которого в системе затрудняет ее настройку вследствие нестабильности его параметров. Высокая частота переключения является одним из источников помех для соседних средств информации и регулирования и снижает надежность системы, а для объектов с запаздыванием приводит к появлению автоколебаний,
Целыо изобретения является повыщение динамической и статической точности устройства.
Это достигается тем, что предлагаемое устройство содержит блок перекшоче- ния, вход которого соединен с выходом усилителя, а выход подключен к управляющему входу коммутатора, другой вход которого соединен с выходом усилителя, а выход подключен ко входу блока коррек- ции.
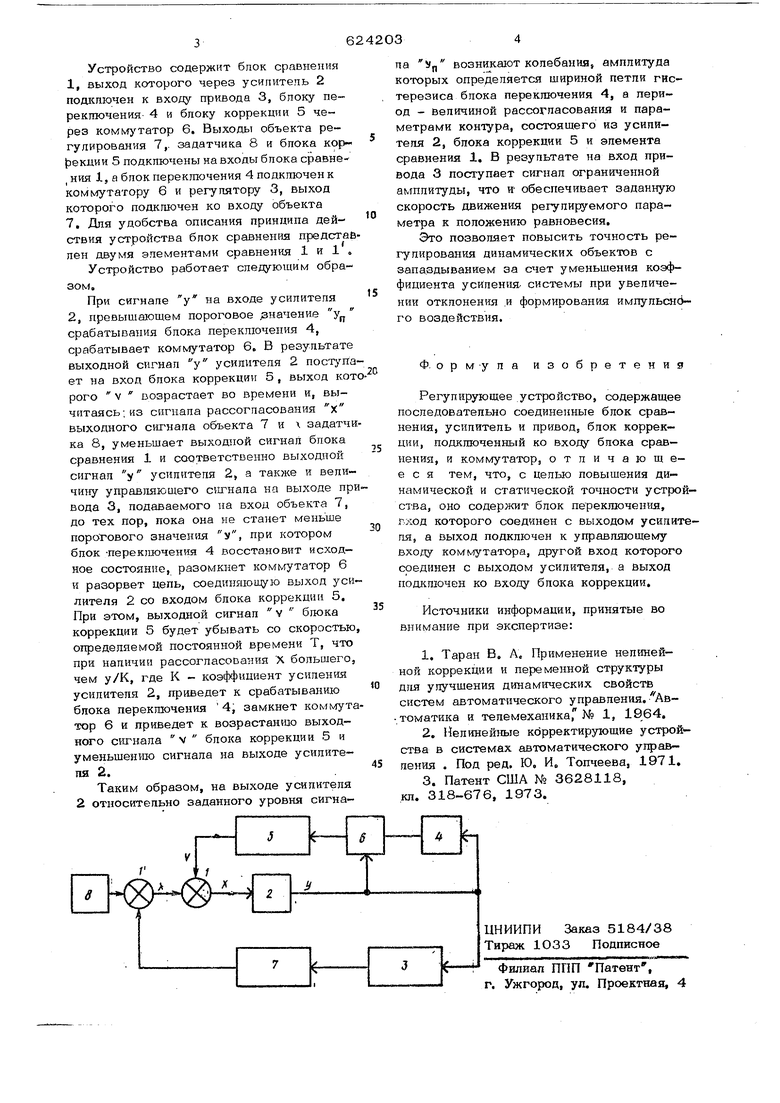
На чертеже изображена .блок-схема устройства. Устройство содержит бпок сравнения 1,выход которого через усипитель 2 подключен к входу привода 3, блоку перекиючания- 4 и блоку коррекции 5 через комментатор 6, Выходы объекта регулированля 7,. задатчика 8 и блока кор рекции 5 подключены на входы блока сравне , НИИ 1, а блок переключения 4 подключен к коммутатору 6 и регулятору 3, выход которого подкшочен ко входу объекта 7, Для удобства описания принципа действия устройства блок сравнения предста лен двумя элементами сравнения 1 и 1 Устройство работает следующим образом. При сигнале у на входе усилителя 2,превышающем пороговое .значение срабатывания блока перекшочепия 4, срабатывает коммутатор 6. В результате выходной сигнал у усилителя 2 поступ ет на вход блока коррекции 5 , выход ко рого V возрастает во времени и, вычитаясь:из сигнала рассогласования х выходного сигнала объекта 7 и задатч ка 8, уменьщает выходной сигнал блока сравнения 1 и соответственно выходной сигнал у усилителя 2, а также и величину управ)1яюи1его сигнала на выходе пр вода 3, подаваемого на вход объекта 7, до тех пор, пока она не станет меньше порогового значения у, при котором блок -перекщочения 4 восстановит исходное состояние, разомкнет коммутатор 6 и разорвет цепь, соединяющую выход уси лителя 2 со входом блока коррекции 5, При этом, выходной сигнал v бтюка коррекции 5 будет убывать со скоростью определяемой постоянной времени Т, что при наличии рассогласования X бопъшего, чем у/К, где К - коэффициент усиления усилителя 2, приведет к срабатыванию бпока переключения 4, замкнет коммута тор 6 и приведет к возрастаншо выходного сигнала v блока коррекции 5 и уменьшению сигнала на выходе усилителя 2.. Таким образом, на выходе усилителя 2 относительно заданного уровня сигнала /п возникают колебания, амплитуда которых определяется шириной петли гистерезиса блока переключения 4, а период - Величиной рассогласования и параметрами контура, состоящего из усилителя 2, блока коррекции 5 и элемента сравнения 1. В результате на вход привода 3 поступает сигнал ограниченной амплитуды, что и обеспечивает заданную скорость движения регулируемого параметра к положению равновесия. Это позволяет повысить точность регупировання динамических объектов с запаздыванием за счет уменьщения коэффициента усиления- системы при увеличении отклонения и формирования импульснс)го воздействия. Форм-ула изобретенид Регулирующее устройство, содержащее последовательно соединенные блок сравнения, усилитель и привод, блок коррекции, подключеннь й ко входу блока сравнения, и коммутатор, отличающееся тем, что, с целью повыщения динамической и статической точности устройства, оно содержит блок перекточения, гход которого соединен с выходом усипитепя, а выход подключен к управляющему входу KOMN-jyTaTopa, другой вход которого соединен с выходом усилителя, а выход подлслючен ко входу блока коррекции. Источники информации, принятые во внимание при экспертизе: 1.Таран В, А. Применение нелинейной коррекции и переменной структуры для улучщения динамических свойств систем автоматического управления, Автоматика и телемеханика, № 1, 1964, 2.Нелинейные корректирующие устройства в системах автоматического управления . Под ред. Ю, И, Топчеева, 1971. 3.Патент США № 3628118, кл. 318-676, 1973.
