Изобретение относится к автоматическому регулированию и предназначено для систем автоматического наблюдения и сопровождения за подвижными объектами в пространстве преимущественно с качающегося основания и может быть использовано для управления воздушным движением.
Известна телевизионно-оптическая система сопровождения со следящим стробом, содержащая телевизионную камеру, устройство обработки видеосигнала, решающее устройство, привод наведения. Барсуков Ф.И., Величкин А.И., Сухарев А.Д. Телевизионные системы летательных аппаратов. - М.: Советское радио, 1979. - 256 с., стр.232, рис.7.17, аналог.
Недостатком данной телевизионной системы является недостаточная точность сопровождения целей с подвижного основания из-за отсутствия системы стабилизации оптической линии визирования и, как следствие, динамической инерционности исполнительного привода и контура электронного слежения. Эта система неспособна к автоматическому захвату объекта на автосопровождение.
Известна также телевизионно-оптическая система [Грязин Г.И., Оптико-электронные системы для обзора пространства: Системы телевидения. Л.: Машиностроение, Ленинградское отделение. - 1988, стр.8, 9, рис.4, аналог], содержащая последовательно соединенные телевизионный датчик, устройство усиления и обработки сигнала, вычислительное устройство (в совокупности образующее пеленгатор) и исполнительный орган. Исполнительный орган, выполняющий функции блока наведения и стабилизации, кинематически связан с оптико-электронным (телевизионным) датчиком пеленгатора.
В известной системе переход в автоматический режим осуществляется посредством предварительного разворота пеленгатора на предназначенный для сопровождения объект таким образом, чтобы он оказался в пределах окна захвата внутри поля зрения. Однако при увеличении угловых скоростей и ускорений визирования объекта вероятность перехода в автоматический режим сопровождения падает. Это объясняется, с одной стороны, падением контраста изображения объекта, перемещающегося относительно растра (см. Грязин Г.Н., Оптико-электронные системы для обзора пространства: Системы телевидения. Л.: Машиностроение, Ленинградское отделение. - 1988, стр.209-212). С другой стороны, если предварительный разворот пеленгатора осуществляется в полуавтоматическом режиме с участием человека (оператора), увеличиваются ошибки сопровождения высокоскоростного объекта оператором в силу ограниченности его динамических характеристик, приводящих к недопустимым переходным процессам в оптико-электронной системе, вызывающим срыв автосопровождения [1].
Недостатком оптических систем сопровождения является их высокая чувствительность к метеоусловиям и оптическим помехам, таким как атмосферная дымка, туман, дымо-пылевые помехи, засветки от ярких источников света и т.д., что объясняется работой телекамеры в видимой области спектра.
Известен также радиолокатор сопровождения, содержащий передатчик, приемник, последовательно соединенные антенну, двигатель вращения облучателя, генератор опорных напряжений, блок выделения сигналов ошибки, устройство наведения и стабилизации. Динамика следящих приводов. / Под ред. Л.В. Рабиновича. - М.: Машиностроение, 1982. - 496 с., стр.132, рис.2.26; Радиолокационные устройства. / Под ред. В.В. Григорина-Рябова. - М.: Советское радио. - 1970, стр.570, рис.21.12, аналог.
Недостатком радиолокатора является чувствительность к средствам радиоэлектронного излучения и затруднительность работы при малых углах места из-за близости подстилающей поверхности.
Наиболее близким по технической сущности к изобретению является свободная от основных недостатков телевизионной и радиолокационной систем известная система сопровождения и наблюдения за объектами в пространстве преимущественно с подвижного основания, которая состоит из последовательно соединенных оптико-электронного пеленгатора, блока сравнения, первого коммутатора и блока фильтрации, последовательно соединенных блока памяти, второго коммутатора и сумматора, последовательно соединенных локационного пеленгатора и формирователя логики режимов, а также устройства наведения и стабилизации. Локационный и оптико-электронный пеленгаторы механически соединены между собой и имеют кинематическую связь с выходным валом устройства наведения и стабилизации. Второй выход локационного пеленгатора подключен ко второму входу второго коммутатора, третий вход которого соединен с первым выходом оптико-электронного пеленгатора. Второй выход второго коммутатора связан со входом устройства наведения и стабилизации, чей второй выход подключен ко второму входу сумматора, выходом соединенного со входом оптико-электронного пеленгатора. Выход блока фильтрации соединен со вторым входом первого коммутатора, второй выход которого подключен ко входу блока памяти. Второй выход оптико-электронного пеленгатора соединен со вторым входом формирователя логики режимов, чьи первый и второй выходы подключены соответственно к управляющим входам первого и второго коммутаторов, второй вход блока сравнения соединен со вторым выходом локационного пеленгатора. Патент РФ, №2197002, МПК7 G01S 13/66, 17/66, прототип.
В известной системе сопровождения обеспечивается автоматический захват на автосопровождение объекта оптико-электронным пеленгатором за счет введения величин разъюстировки между локационным и оптическим пеленгаторами и текущих динамических ошибок на следящий строб. Повышается устойчивость сопровождения объекта за счет обеспечения возможности перехода сопровождения с локационного режима в оптический и обратно. Кроме того, обеспечивается автоматизация определения величины разъюстировки между локационным и оптическим каналами.
Указанные известные системы наведения (аналог, прототип) предназначены для сопровождения наблюдаемого объекта. При использовании пеленгаторов для одновременного сопровождения наблюдаемого объекта, а также обеспечения вывода и сопровождения собственного объекта до его встречи с наблюдаемым объектом возможны срывы автосопровождения в связи с возможным переходом пеленгаторов на сопровождение иного объекта из находящихся в поле зрения пеленгаторов. Срыв автосопровождения связан с ухудшающейся помехозащищенностью пеленгаторов при выводе собственного объекта (дымо-пылевые помехи, яркая плазма двигателя собственного объекта, значительно превышающая по фону параметры сопровождаемого объекта).
Задачей предлагаемого технического решения является повышение точности и устойчивости сопровождения наблюдаемого объекта, повышение помехозащищенности интегрированной системы сопровождения при выводе и последующем вводе собственного объекта в поле зрения телевизионного пеленгатора или в диаграмму направленности локационного пеленгатора для его наведения основным локационным или телевизионным пеленгатором до его встречи с сопровождаемым объектом.
Решение указанной задачи достигается за счет того, что в следящую локационно-оптическую систему сопровождения подвижных объектов, состоящую из последовательно соединенных оптико-электронного пеленгатора, блока сравнения, первого коммутатора и блока фильтрации, последовательно соединенных блока памяти, второго коммутатора и сумматора, последовательно соединенных локационного пеленгатора и формирователя логики режимов, а также устройства наведения и стабилизации, причем локационный и оптико-электронный пеленгаторы механически соединены между собой и имеют кинематическую связь с выходным валом устройства наведения и стабилизации, второй выход локационного пеленгатора подключен ко второму входу второго коммутатора, третий вход которого соединен с первым выходом оптико-электронного пеленгатора, второй выход второго коммутатора связан со входом устройства наведения и стабилизации, чей второй выход подключен ко второму входу сумматора, выходом соединенного со входом оптико-электронного пеленгатора, выход блока фильтрации соединен со вторым входом первого коммутатора, второй выход которого подключен ко входу блока памяти, второй выход оптико-электронного пеленгатора соединен со вторым входом формирователя логики режимов, чьи первый и второй выходы подключены соответственно к управляющим входам первого и второго коммутаторов, второй вход блока сравнения соединен со вторым входом локационного пеленгатора, введены дополнительный локационный пеленгатор с переключаемой шириной диаграммы направленности для захвата и вывода собственного объекта на линию визирования основных локационного и оптико-электронного пеленгаторов, система управления дополнительным пеленгатором, блок выработки сигналов упреждения, третий коммутатор и второй блок сравнения, причем дополнительный пеленгатор установлен на одной платформе с ЛПл и ОЭПл и имеет возможность автономного наведения по курсу и углу места собственным управляемым приводом, а система управления дополнительного пеленгатора состоит из последовательно соединенных первого нелинейного элемента, представляющего собой усилитель с переменным коэффициентом усиления, сглаживающего фильтра, четвертого коммутатора, блока коррекции, третьего блока сравнения, задатчика интенсивности, управляемого привода и масштабного усилителя, причем первый выход управляемого привода кинематически связан со вторым входом дополнительного пеленгатора, второй выход управляемого привода по скорости двигателя подключен к входу масштабного усилителя, который выходом подключен ко второму входу третьего блока сравнения, а третий выход управляемого привода подключен к первому входу второго блока сравнения, первый вход которого подключен через третий коммутатор к выходу блока выработки сигналов упреждения, а выход ко второму входу четвертого коммутатора, первый выход дополнительного пеленгатора подключен ко входу первого нелинейного элемента, а третий выход к третьему входу формирователя логики режимов, первый, второй, третий и четвертый выходы которого подключены соответственно к управляющим входам первого, второго, третьего и четвертого коммутаторов.
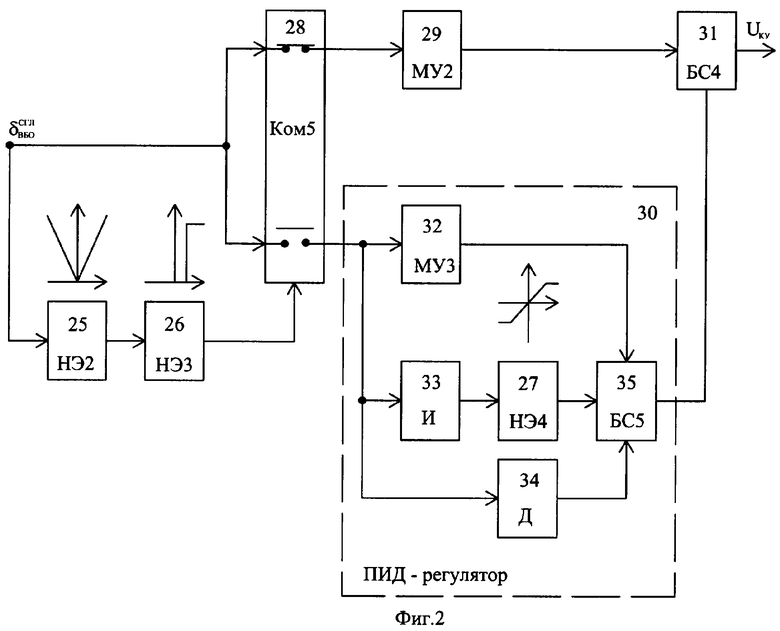
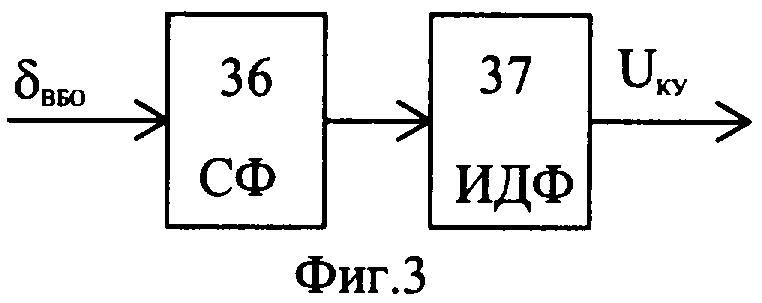
Блок коррекции системы управления дополнительного пеленгатора может быть выполнен в двух вариантах. Первый вариант блока коррекции предназначен для системы управления, обеспечивающей вывод и сопровождения нескольких собственных объектов, и представляет нелинейное динамическое корректирующее устройство, которое включает в себя пятый коммутатор, последовательно соединенные второй масштабный усилитель и четвертый блок сравнения, последовательно соединенные второй и третий нелинейные элементы, пропорционально-интегродифференциальный (ПИД)-регулятор, причем вход пятого коммутатора и второго нелинейного элемента соединены между собой и это соединение является входом блока коррекции, выход третьего нелинейного элемента присоединен ко управляющему входу пятого коммутатора, первый выход пятого коммутатора подключен ко входу второго масштабного усилителя, а второй выход - подключен ко входу ПИД-регулятора, выход которого подключен ко второму входу четвертого блока сравнения. Выход четвертого блока сравнения является выходом блока коррекции. ПИД-регулятор включает в себя третий масштабный усилитель, интегратор, четвертый нелинейный элемент, дифференциатор, пятый блок сравнения, причем входы третьего масштабного усилителя, интегратора и дифференциатора соединены между собой и их соединение является входом ПИД-регулятора, выход третьего масштабного усилителя подключен к первому входу пятого блока сравнения, ко второму входу которого подключен выход четвертого нелинейного элемента, а к третьему входу - выход дифференциатора. Выход пятого блока сравнения является выходом ПИД-регулятора. Второй нелинейный элемент представляет блок выделения модуля, третий нелинейный элемент - компаратор с зоной нечувствительности, четвертый нелинейный элемент - усилитель с ограниченной линейной зоной. Статические характеристики НЭ1-НЭ4 приведены на фиг.1, фиг.2. Второй вариант блока коррекции используется для системы управления, которая обеспечивает вывод и наведение одного собственного объекта, и включает в себя последовательно соединенные сглаживающий и интегродифференцирующий фильтры с передаточными функциями:
 , где Т=0.08 с; ξ=0.4-0.5,
, где Т=0.08 с; ξ=0.4-0.5,
 , где К=10, Т1=0,1 с.
, где К=10, Т1=0,1 с.
Параметры передаточных функций для сглаживающего фильтра определяются спектральным составом шума и полезного сигнала локационного пеленгатора, а для интегродифференцирующего фильтра - требуемыми характеристиками точности работы системы управления дополнительного локационного пеленгатора.
Все использованные блоки и устройства являются известными или могут быть выполнены из известных блоков, соединенных известным способом. Пеленгаторы могут быть выполнены, например, как в [2], [3], [4] или [5]. Блок памяти может быть как аналоговым (устройство выборки-хранения), так и реализованным на цифровой элементной базе. Блок сравнения и фильтр полезного сигнала могут быть реализованы на аналоговой [6] или цифровой [7] элементной базе. Коммутаторы могут быть выполнены на электромеханических реле, герконах, полупроводниковых ключах и т.п. Блоки нелинейных элементов могут быть реализованы на операционных усилителях [8] или цифровых микросхемах. Устройство наведения и стабилизации может быть реализовано как в прототипе на базе гидравлических, электрических [9], в т.ч. и на базе моментных двигателей и т.п., сервоприводов, формирователь логики режимов может быть изготовлен на базе логических микросхем [10].
В качестве иллюстрации на чертежах приведены: на фиг.1 - функциональная схема предлагаемой следящей локационно-оптической системы сопровождения подвижных объектов, на фиг.2 - блок коррекции в виде нелинейного динамического корректирующего устройства, на фиг.3 - блок коррекции в виде интегродифференцирующего фильтра.
Следящая локационно-оптическая система состоит из блока пеленгаторов (БП) 1, включающего локационный (ЛПл) 2, оптико-электронный (ОЭПл) 3 и дополнительный локационный пеленгатор с переключающимся полем зрения (доп. ЛПл) 4, установленных на общей платформе (по крайней мере их приемные устройства), формирователя логики режимов (ФЛР) 5, первого блока сравнения (БС1) 6, первого коммутатора (Ком 1) 7, блока фильтрации (БФ) 8, блока памяти (БП) 9, второго коммутатора (Ком 2) 10, сумматора 11, устройства наведения и стабилизации (УНС) 12, блока выработки сигналов упреждения (БВСУ) 13, третьего коммутатора (Ком 3) 14, второго блока сравнения (БС2) 15, системы управления дополнительного локационного пеленгатора (СУ доп. ЛПл) 16, включающей в себя первый нелинейный элемент (НЭ1) 17, сглаживающий фильтр (СФ) 18, четвертый коммутатор (Ком 4) 19, блок коррекции (БК) 20, третий блок сравнения (БСЗ) 21, задатчик интенсивности (ЗИ) 22, управляемый привод (УП) 23, масштабный усилитель (МУ) 24. Блок коррекции для сопровождения нескольких собственных объектов включает в себя второй (НЭ2) 25, третий (НЭ3) 26 и четвертый (НЭ4) 27 нелинейные элементы, пятый коммутатор (Ком 5) 28, второй масштабный усилитель (МУ2) 29, ПИД-регулятор 30, четвертый блок сравнения (БС4) 31. ПИД-регулятор включает в себя третий масштабный усилитель (МУ3) 32, интегратор (И) 33, четвертый нелинейный элемент (НЭ4) 27, дифференциатор (Д) 34, пятый блок сравнения (БС5) 35. Блок коррекции для сопровождения одного собственного объекта включает в себя сглаживающий фильтр (СФ) 36 и интегродифференцирующий фильтр (ИДФ) 37. Локационный и оптико-электронный пеленгаторы механически соединены между собой и установлены на одной платформе с дополнительным локационным пеленгатором. Платформа имеет кинематическую связь с выходным валом устройства наведения и стабилизации, а дополнительный локационный пеленгатор имеет возможность автономного наведения по курсу и углу места с помощью собственного управляемого привода.
Работа системы осуществляется следующим образом. Пеленгаторы 2, 3 ведут слежение за объектом одновременно и выдают сигналы, пропорциональные угловому отклонению сопровождаемого объекта от линии визирования, независимо один от другого. Устойчивость сопровождения объекта и возможность восстановления сопровождения в автоматическом режиме в случае перерыва оптической связи или потери объекта локационным пеленгатором обеспечивается построением интегрированной системы сопровождения подвижных объектов. Следящая система включает в себя локационный и оптико-электронный пеленгаторы механически соединенные между собой и имеющие кинематическую связь с выходным валом устройства наведения и стабилизации. Пеленгаторы также последовательно соединены с формирователем логики режимов, подключенным к управляющим входам коммутаторов. Возможность перехода сопровождения с локационного режима в оптический и обратно обеспечивается переключением структур с помощью контактов коммутатора. Коммутаторы могут находиться в двух состояниях - включенном или выключенном. Включен - режим управления УНС от ЛПл, отключен - режим управления УНС от ОЭПл.
Локационный режим сопровождения объектов обеспечивается структурой контура, включающего приемник, передатчик, антенный переключатель, синхронизатор системы сопровождения по дальности и угловым координатам и устройство наведения и стабилизации. Приемник, передатчик, антенный переключатель, синхронизатор системы сопровождения по угловым координатам в совокупности представляют собой локационный пеленгатор. Локационный пеленгатор определяет положение объекта относительно оси диаграммы направленности антенны. Сигналы о положении объекта после звена коррекции подаются на вход устройства наведения и стабилизации, и оно осуществляет разворот локационного пеленгатора до тех пор, пока объект не окажется на оси диаграммы направленности. УНС позволяет также компенсировать качки носителя.
Оптический режим сопровождения система обеспечивается структурой, содержащей последовательно соединенные телевизионный датчик, устройство усиления и обработки сигнала, вычислительное устройство, в совокупности образующее ОЭПл, устройство коррекции и УНС. Исполнительный орган УНС общий для ЛПл и ОЭПл, с учетом того что управляющие сигналы содержат информацию о качках носителя, выполняет функции устройства наведения и стабилизации и кинематически связан с оптико-электронным датчиком пеленгатора.
Сопровождение подвижного объекта происходит следующим образом. После того как по сигналу от внешней системы блок пеленгаторов развернут в направлении объекта с точностью, достаточной для взятия его на сопровождение, локационный и оптико-электронный пеленгаторы осуществляют его захват и начинают вырабатывать условные координаты объекта относительно оптической оси или оси антенны радиолокатора. Для того чтобы исключить из сигнала составляющую от качки и уменьшить перекрестные связи между каналами, сигнал с выхода пеленгатора (локационного, оптико-электронного) пересчитывают в стабилизированную систему координат, например, по зависимостям (1)


δε, δβ - сигналы рассогласования в нестабилизированной системе координат;
δεс, δβс - сигналы рассогласования в стабилизированной системе координат;
γ - угол скрутки нестабилизированной системы координат ([11], стр.138).
Через коммутатор, полученный в пеленгаторе (локационном, оптико-электронном), сигнал поступает на вход корректирующего устройства, где проводятся такие операции над ним, чтобы, обеспечивая устойчивость системы, добиться требуемых параметров по точности и характеристикам переходных процессов [12].
Поскольку диаграмма направленности луча (1-2 град) локационного пеленгатора (2) существенно больше величины следящего строба (1-5 мрад) оптико-электронного пеленгатора (3) и, как правило, превышает по величине погрешность целеуказания, первоначально объект берется на автосопровождение локационным пеленгатором. Он выдает признак автосопровождения объекта в формирователь логики режимов (5), который обеспечивает подключение через второй коммутатор (10) второго выхода ЛПл (2) ко входу УНС (12) и блока памяти 9 - к сумматору 11. Выходной вал УНС разворачивает пеленгаторы (или их передающие устройства) в сторону объекта таким образом, чтобы объект оказался на оси диаграммы направленности локационного пеленгатора 2.
Однако погрешность определения координат объекта с помощью локационного пеленгатора существенно выше, чем с помощью оптико-электронного. Поэтому целесообразно перевести управление устройством наведения и стабилизации УНС 12 на сигнал от ОЭПл (3). Для этого необходимо обеспечить попадание изображения от объекта в часть поля зрения ОЭПл, соответствующую стробу. Поскольку процессу сопровождения, особенно за высокоскоростными объектами с быстродвижущегося носителя, присущи динамические ошибки, необходимо обеспечить перемещение следящего строба по полю зрения в соответствии с текущей величиной ошибки. Для этого сигнал, соответствующий ошибке УНС по соответствующему направлению, подается через сумматор на вход оптико-электронного пеленгатора (3), в котором выполняется динамическая коррекция параметров контура сопровождения. Кроме того, в системе учитывается величина разъюстировки пеленгаторов. Последнее связано с тем, что погрешность установки достаточно крупных приборов может достигать 1-2 мрад и неучет этой погрешности может привести к тому, что изображение объекта окажется вне строба, даже при идеальном учете динамической ошибки. Для компенсации разъюста соответствующая поправка из блока памяти (9) добавляется в сумматоре (11) к сигналу из УНС (12).
Когда изображение объекта оказывается в стробе и сигнал от него становится отличным от фона, ОЭПл (3) выдает в ФЛР (5) информацию об этом со своего второго выхода. Формирователь логики режимов переключает с помощью второго коммутатора (10) вход УНС (12) к первому выходу ОЭПл и отключает БП (9) от сумматора (11). В этом режиме выходной вал УНС (12) стремится развернуть пеленгаторы так, чтобы изображение объекта оказалось в центре растра, соответствующем положению оптической оси ОЭПл (3). Точность слежения за объектом возрастает. Дополнительный эффект повышения точности определения координат достигается за счет того, что сигнал от УНС подается на контур следящего строба, при этом сигнал УНС выполняет роль компенсирующей связи, разгружающей контур следящего строба. В предлагаемой системе процедура юстировки пеленгаторов автоматизирована. Это достигается сравнением между собой координат, вырабатываемых локационным и оптико-электронным пеленгаторами, в БС1 (6), при необходимости с учетом параллакса. Поскольку разность сигналов имеет малую величину, а сигналы, особенно с локационного пеленгатора, зашумлены, полученную величину подвергают фильтрации в БФ (8). Вид фильтра определяется спектральным составом полезного сигнала и шума. Для медленно меняющихся полезных сигналов могут использоваться фильтры низких частот либо устройства, вычисляющие среднее значение функции на определенном временном интервале. Результаты заносятся в БП (9). Эти операции проводятся при одновременно работающих пеленгаторах. Формирователь логики режимов (5) анализирует наличие признака автосопровождения в обоих каналах и выдает в этом случае сигнал управления на первый коммутатор (7), который подключает блок сравнения БС1 (6) к блоку фильтрации БФ (8), а последний к блоку памяти БП (9).
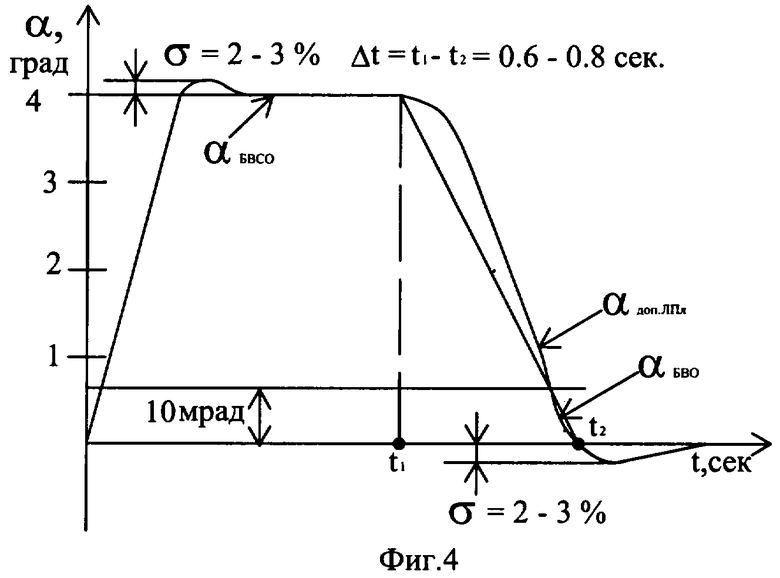
В ряде практических применений комбинированной системы возникает задача обеспечения и последующего сопровождения собственного объекта вплоть до его встречи с визируемым основными пеленгаторами объектом. При выводе собственного объекта на линию визирования основных пеленгаторов возможен срыв автосопровождения из-за яркого факела собственного объекта и значительных дымо-пылевых помех двигателя собственного объекта. Дымо-пылевые помехи затеняют наблюдаемый объект, а яркий факел собственного объекта представляет из себя более контрастный объект для ЛПл и ОЭПл, в связи с чем возможен переход сопровождения пеленгатором с визируемого объекта на собственный. Для исключения явлений перезахвата в предлагаемом техническом решении вывод собственного объекта производится под углами 4-6 градусов к линии визирования основных пеленгаторов (ЛПл и ОЭПл) с последующим плавным вводом собственного объекта на линию визирования основных пеленгаторов. Разворот дополнительного пеленгатора на угол 4-6 град к линии визирования сопровождаемого объекта происходит по сигналу с БВСУ (13) с помощью замкнутого по углу управляемого привода УП (23). Замыкание по угловому положению управляемого привода дополнительного локационного пеленгатора (4) осуществляется с помощью блока сравнения БС2 (15) и коммутатора Ком 4. На один из входов блока сравнения БС2 (15) подается сигнал обратной связи по углу с третьего выхода управляемого привода (23), а на другой вход БС2 (15) через третий коммутатор сигнал управления с БВСУ (13). Выходной сигнал с выхода БС2 через контакты коммутатора Ком 4 подключается через БК (20) на управляемый привод, при этом другими контактами Ком 4 (19) отключает сигнал дополнительного локационного пеленгатора от управляемого привода (23). После входа собственного объекта в диаграмму направленности дополнительного локационного пеленгатора в упрежденной точке по сигналу с формирователи логики режимов начинается плавный ввод собственного объекта на линию визирования основных пеленгаторов (2), (3). Сигнал управления с БВСУ (13), поступающий на вход замкнутого по углу управляемого привода дополнительного локационного пеленгатора, начинает плавно уменьшаться по закону αвых=αmax-kt, где αmax - 4-6 град., t - время согласования (0,6-0,8) с, k - коэффициент, определяемый из условия равенства нулю выходного сигнала с БВСУ на момент окончания ввода собственного объекта. По мере согласования диаграммы направленности дополнительного локационного пеленгатора с линией визирования основных пеленгаторов (при достижении ошибки δ<10 мрад) вывод и сопровождение собственного объекта осуществляется по сигналу с дополнительного локационного пеленгатора, для чего ФЛР (5) с помощью контактов коммутатора Ком 3, Ком 4 отключается обратная связь по углу с третьего выхода управляемого привода, сигнал с выхода БВСУ и БС2. Для управления управляемым приводом Ком 4 подключает сигнал дополнительного локационного пеленгатора к системе управления доп. ЛПл (16). Такое решение задачи вывода собственного объекта исключает влияние помех на работу основных пеленгаторов и определяет наличие дополнительного локационного пеленгатора, который осуществляет захват собственного объекта и его последующий ввод в сигнал управления основного пеленгатора. Дополнительный локационный пеленгатор устанавливается на одной платформе с основными пеленгаторами и имеет собственное автономное наведение по курсу и углу места. Необходимость захвата собственного объекта в упрежденной точке, точный последующий ввод собственного объекта на линию визирования основных пеленгаторов определяет широкий угол обзора дополнительного локационного пеленгатора. Дополнительный локационный пеленгатор может иметь несколько антенн - антенну захвата собственного объекта и ряд антенн с различными диаграммами направленности от широкой к узкой. Переход автосопровождения на антенну с широкой диаграммы на узкую осуществляется автоматически в соответствии с величинами ошибок контура дополнительного локационного пеленгатора для вывода собственного объекта. Малым ошибкам вывода соответствует узкая диаграмма направленности и наоборот. Установка основных и дополнительного локационного пеленгатора на одной платформе определяют требования к системе управления дополнительного локационного пеленгатора. Дополнительный локационный пеленгатор должен отрабатывать отвороты (управление по углу) на 4-6 град. Для исключения влияния поворота платформы с дополнительным локационным пеленгатором на работу основных пеленгаторов заданные углы отворота должны отрабатываться без рывков и колебаний с перерегулированием относительно установившегося положения не более 1-2% и с заданным временем отработки. В то же время в малом (в согласованном с локационным и оптико-электронным пеленгаторами положении) необходимо обеспечить точный ввод собственного объекта на линию визирования основных пеленгаторов. Точность вывода должна быть не хуже 0,1-0,5 мрад. Высокая точность согласования и отработка углов отворота с заданным временем без перерегулирования и колебаний определяют структуру и аппаратное построение системы управления дополнительного локационного пеленгатора. Для задания углов отворота дополнительного локационного пеленгатора в систему управления введен дополнительный блок выработки сигналов упреждения БВСУ (13), обеспечивающий формирование и задание по сигналу с формирователя логики режимов (5) через третий коммутатор (14) сигналов отворота на второй блок сравнения БС2 (15). Управляемый привод УП (23) в режиме отработки углов отворота замыкается по угловому положению, замеряемому с помощью датчиков угла. В качестве датчиков угла используются точные цифровые датчики с 16 разрядами для обработки текущего углового положения. Для обеспечения высокой точности в контуре дополнительного локационного пеленгатора при выводе собственного объекта организовано управление с повышенным порядком астатизма относительно управляющего воздействия. Дополнительный порядок астатизма вводится за счет перевода управляемого электропривода (23) в режим управления по скорости. Точность при малых ошибках управления и заданное время отработки управления без перерегулирования определяется введением в контур управления блока коррекции БК (20) в виде нелинейного динамического корректирующего устройства (НДКУ) фиг.2. НДКУ позволяет формировать управление в двух режимах - при отработке больших и малых сигналов управления. При отработке угла отворота 4-6 град, когда ошибка регулирования большая, работает канал пропорционального управления через коммутатор Ком 5 (28) и масштабный усилитель МУ2 (29). В малом, когда ошибка регулирования достигает величин 10-12 мрад, работает высокоточное ПИД регулирование через коммутатор Ком 5 (28) и ПИД-регулятор (30). Переключение регуляторов осуществляет коммутатор Ком 5 (28), а управление коммутатором Ком 5 происходит сигналом ошибки, проходящим через нелинейные элементы НЭ2 (25) и НЭ3 (26). НЭ3 выполнен в виде блока модуля, НЭ4 - в виде компаратора с зоной нечувствительности. Зона нечувствительности НЭ4 (26) настраивается на величину ошибки, при которой осуществляется переключение регуляторов каналов управления в большом и малом. Такое построение корректирующего устройства решает задачу обеспечения противоречивых требований обеспечения устойчивости замкнутой системы в большом при отработке отворотов в 4-6 град (отработка управления без перерегулирования) и точности регулирования при малых ошибках управления. Малые ошибки обеспечиваются за счет создания повышенного порядка астатизма применением ПИД-регулятора (30) и перевода регулируемого привода РП (23) в режим отработки управления по скорости. Требуемое время регулирования 0,6-0,8 с в системе обеспечивается за счет введения задатчика интенсивности ЗИ (22) нарастания скорости регулируемого привода. В системе управления использованы также специальные устройства, которые обеспечивают точную работу контура управления с учетом нелинейностей элементов контура (пеленгаторов) управления и зоны нечувствительности замкнутого по скорости двигателя управляемого привода. Зона нечувствительности скоростного привода обусловлена трением в механической передаче и нежесткостью зубчатых зацеплений механической системы привода. Исключение влияния трения и нежесткости механической системы в предлагаемой следящей системе обеспечено за счет организации дополнительной обратной связи по скорости выходного вала электропривода, реализованной с помощью масштабного усилителя МУ (24). Нелинейность пеленгационной характеристики дополнительного локационного пеленгатора исключается введением нелинейного элемента НЭ1 (17), имеющего статическую характеристику, обратную статической характеристике дополнительного локационного пеленгатора. Сложение статической характеристики НЭ1 (17) и пеленгационной характеристики дополнительного локационного пеленгатора обеспечивает линейную характеристику блока «НЭ1 - дополнительный локационный пеленгатор». Из изложенного видно, что реализация блока коррекции БК (20) с переключаемой структурой позволяет при отработке больших сигналов управления отрабатывать их с заданным временем регулирования при отсутствии перерегулирования и высокой точностью отработки заданных управлений. Полученные параметры: - точность регулирования статическая 0,1-0,2 мрад, динамическая ошибка - не более 0,5 мрад, перерегулирование - σ=1-2%, регулируемое время отработки - от 0,5 до 1,5 с. На фиг.4 приведены осциллограммы работы системы управления дополнительного ЛПл при отработке сигналов отворота с позиционным управляемым приводом и согласование линии визирования дополнительного ЛПл при вводе собственного объекта в зону управления основных пеленгаторов.
Таким образом, в заявленном техническом решении за счет применения дополнительного локационного пеленгатора и блока выработки сигналов упреждения при использовании новой высокоточной системы управления обеспечивается:
- повышение устойчивости сопровождения объектов локационным и оптико-электронным пеленгаторами;
- возможность сопровождения объектов пеленгаторами при выводе собственного объекта с исключением захвата не того объекта, т.е. повышение помехозащищенности системы сопровождения;
- повышенная точность ввода собственного объекта с регулируемым временем ввода;
- автономная работа дополнительного локационного пеленгатора и исключение влияния его работы на работу основных пеленгаторов;
- устойчивая работа дополнительного локационного пеленгатора при отработке больших (несколько градусов) и малых (единицы мрад) управлений при высокой точности подхода пеленгатора к заданному положению;
- возможность вывода и сопровождения нескольких собственных объектов.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Цибулевский И.Е. Человек как звено следящей системы, М.: Наука. - 1981, стр.93-108.
2. Госсорг Ж. Инфракрасная термография. Основы, техника, применение. Пер. с франц., М.: Мир. - 1988, стр.344-346, стр.375, рис.а, аналоги.
3. Максимов М.В., Горгонов Г.И. Радиоэлектронные системы самонаведения, М.: Радио и связь. - 1982, стр.117-120, рис.3.28.
4. Барсуков Ф.И., Величкин А.И., Сухурев А.Д. Телевизионные системы летательных аппаратов, М.: Советское радио. - 1979.
5. Радиолокационные устройства, под ред. В.В. Григорина-Рябова, М.: Советское радио. - 1970, стр.570, рис.21.12.
6. Тетельбаум И.М., Шнейдер Ю.Р. Практика аналогового моделирования динамических систем, М.: Энергоатомиздат. - 1987.
7. Френк Т.С. РДР - 11. Архитектура и программирование, М.: Радио и связь. - 1986.
8. Тетельбаум И.М., Шнейдер Ю.Р. 400 схем для АВМ, М.: Энергия. - 1978.
9. Чиликин М.Г., Сандлер А.С. Общий курс электропривода, М.: Энергоиздат. - 1981.
10. Павлов В.В. Управляющие устройства логического типа, М.: Энергия. - 1968.
11. Ривкин С.С. Стабилизация измерительных устройств на качающемся основании, М.: Наука. - 1978.
12. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования, М.: Наука. - 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| ИНТЕГРИРОВАННАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2327188C1 |
| ИНТЕГРИРОВАННАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2012 |
|
RU2498345C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| ИНТЕГРИРОВАННАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2321020C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ | 2001 |
|
RU2212687C2 |
Следящая локационно-оптическая система сопровождения подвижных объектов может быть использована для управления воздушным движением. Технический результат изобретения заключается в повышении помехозащищенности работы системы управления и обеспечении сопровождения наблюдаемого объекта при выводе и сопровождении собственного объекта вплоть до его встречи с наблюдаемым объектом. Указанный результат достигается за счет того, что в следящую локационно-оптическую систему сопровождения, содержащую функционально связанные между собой локационный и оптико-электронный пеленгаторы, формирователь логики режимов, блок сравнения, первый коммутатор и блок фильтрации, блок памяти, второй коммутатор и сумматор, а также устройство наведения и стабилизации, введен дополнительный локационный пеленгатор, установленный на общем основании с основными локационным и оптико-электронным пеленгаторами, имеющий высокоточную систему управления и блок выработки сигналов упреждения. Система управления дополнительного пеленгатора обеспечивает захват собственного объекта в упрежденной точке и его ввод на линию визирования основных пеленгаторов. 2 з.п. ф-лы, 4 ил.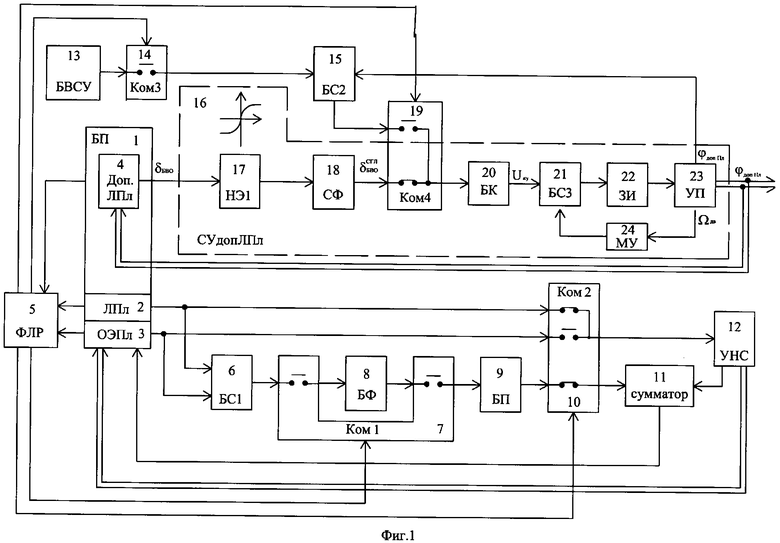
где Т=0,08 с; ξ=0,4-0,5;
где К=10, T1=0,1 с,
а параметры передаточных функций для сглаживающего фильтра определяются спектральным составом полезного сигнала и сигнала шума, а для интегродифференцирующего фильтра - динамическими характеристиками системы управления дополнительного пеленгатора.
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| RU 2058034 C1, 10.04.1996 | |||
| RU 93021672 А, 27.09.1995 | |||
| US 2005285774 A1, 29.12.2005 | |||
| Способ определения статических поправок | 1987 |
|
SU1536248A1 |
| WO 2004021072 A2, 11.03.2004. | |||

