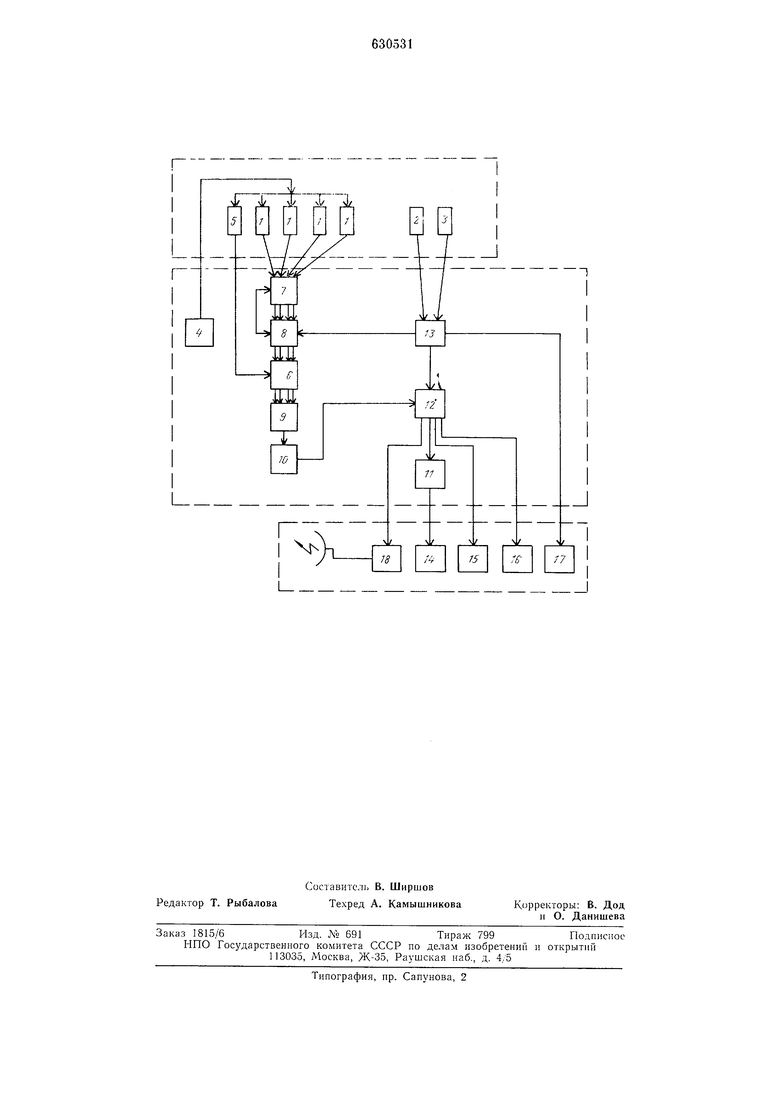
полнен с числом обмоток, равным числу тензометрических датчиков веса, контрольный тензометрический датчик 5, измеритель 6 сдвига фаз, многоканальный усилитель 7, блок 8 калибровки сигналов, сумматор 9, преобразователь 10 аналог-код, корректор И нуля, узел 12 сравнения, блок 13 унравления, индикатор 14 разового отсчета, блок 15 световой сигнализации, счетчик 16 массы, счетчик 17 чисел рейсов и апиаратуру 18 радиосвязи.
Блок 15 световой сигнализации выполнен, нанример, с тремя цветными ламночками.
Устройство работает следующим образом.
При загрузке автосамосвала из.меняются соиротивления датчиков 1 веса, что вызывает сдвиги фаз в измерительных цепях по отношению К фазе сигнала в измерительной цени контрольного тензометрического датчика 5, которые оиределяются измерителем 6 сдвига фаз. С выхода сумматора 9 сигнал поступает на преобразователь 10 аналог-код и далее через узел 12 сравнения - на иидпкатор 14 разового отсчета.
В узле сравнения непрерывно происходит сравнение сигнала, пропорционального загруженной массе, с сигналом, пропорциональным допустимой для загрузки массы.
Когда масса груза меньше допустимой, на блоке 15 горит зеленая лампочка световой сигнализации, если равна допустимой - желтая, больше донуетимой - красная.
Одновременно информация о массе передается по радиосвязи на цифровой индикатор в кабине экскаватора (на чертеже не показан).
Работа узла сравнения, блока световой сигнализации и аппаратуры радиосвязи осуществляется по команде блока 13 управления при олущенном кузове, когда датчик положения включен, а датчик 3 выключен.
В момент начала подъема кузова датчик 2 -выключается, а датчик 3 включается при максимальном отклонении кузова от горизонтального положения. По команде блока 13 управления .информация из узла сравнения поступает в счетчик 16, суммирующий массу нарастающим итогом. Занесение данных в счетчик 16 ироизводится только один раз при условии, если вес груза находится в допустимом пределе (горела желтая лампа световой сигнализации).
В момент опускания порожнего кузова датчик 3 размыкается, а датчик 2 замыкается. Тогда по команде блока управления на счетчике 17 числа рейсов регистрируется очередной рейс, а в узле 12 еравнения нроизводится сопоставление веса кузова с его чистым весом. Если нолученная нз-за налипания или примерзания породы разница не превышает определенной величины (например, 2%), на индикаторе 14 корректором нуля устанавливается нуль отсчета. В противном случае из обшей массы на счетчике 16 вычитается масса, оставшаяся
в кузове. Затем блоком 8 калибровки сигналов производится выравнивание чувствительности измерительных цепей всех датчиков веса. Таким образом, система подготовлена к регистрации очередной погрузки.
Информация о массе перевезенного груза и числе рейсов передается в центральную диспетчерскую посредством аппаратуры 18 радиосвязи.
Формула изобретения
Устройство для онределеиия и регистрации массы груза, перевозимой в кузове автосамосвала, содерлсащее тензометрические датчики веса, датчики положения кузова, блок управления, нреобразователь аналог- код, счетчики массы и радиопередатчик, отличающееся тем, что, с целью повышеиия точности, оно снабжено контрольным тензометрическим датчиком, измерителем сдвига фаз, блоком калибровки сигналов, многоканальным усилителем, сумматором, узлом сравнения, корректором нуля и
счетчиком числа рейсов, причем многоканальный усилитель, блок калибровки сигналов, измеритель сдвига фаз, сумматор, преобразователь аналог-код и узел сравнения соединены меледу собой последовательно,
к входам блока управления подключены датчики положения кузова, а его выходы соединены с узлом сравнения, блоком калибровки сигналов и счетчиком числа рейсов, выход контрольного тензометрического
датчика подключен к входу измерителя сдвига фаз, а выход блока ка„1ибровки сигналов связан с одним из входов многоканального усилителя, к другим входам которого подключены тензометрические датчики веса, которые при этом расположены во всех местах опирания кузова на подвеску.
Источники информации, принятые во внимание при экспертизе
1.Авторскоесвидетельство СССР № 336526, кл. G 01G 7/00, 1971.
2.Патент США № 3800895, кл. 177-136, опубл. 1974.
3.Авторское свидетельство СССР .NO 498502, кл. G GIG 19/12, 1973.
Г
1
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ ВЕСОВОЕ УСТРОЙСТВО | 1992 |
|
RU2046300C1 |
| Устройство определения полной массы транспортного средства | 2021 |
|
RU2763854C1 |
| СИСТЕМА РЕГИСТРАЦИИ И КОНТРОЛЯ РЕЙСОВ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2586860C2 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА ЗАГРУЗКИ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ ВЕСОВОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2395791C1 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ СТРОИТЕЛЬНЫХ ГРУЗОВ | 2003 |
|
RU2243592C1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА ЗАГРУЗКИ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ ВЕСОВОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2395062C1 |
| Устройство для измерения массы груза в кузове автосамосвала | 1986 |
|
SU1372196A1 |
| УСТРОЙСТВО ДЛЯ УЧЕТА РЕЙСОВ АВТОСАМОСВАЛОВ | 2000 |
|
RU2184992C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ ВЕСОВОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2406981C1 |
| Устройство для взвешивания груза в автосамосвале | 1982 |
|
SU1049751A1 |