Изобретение относится к весоизмерительной технике.
Цель изобретения - повьшение надежности и расширение функциональных возможностей устройства за счет измерения тонно-километров.
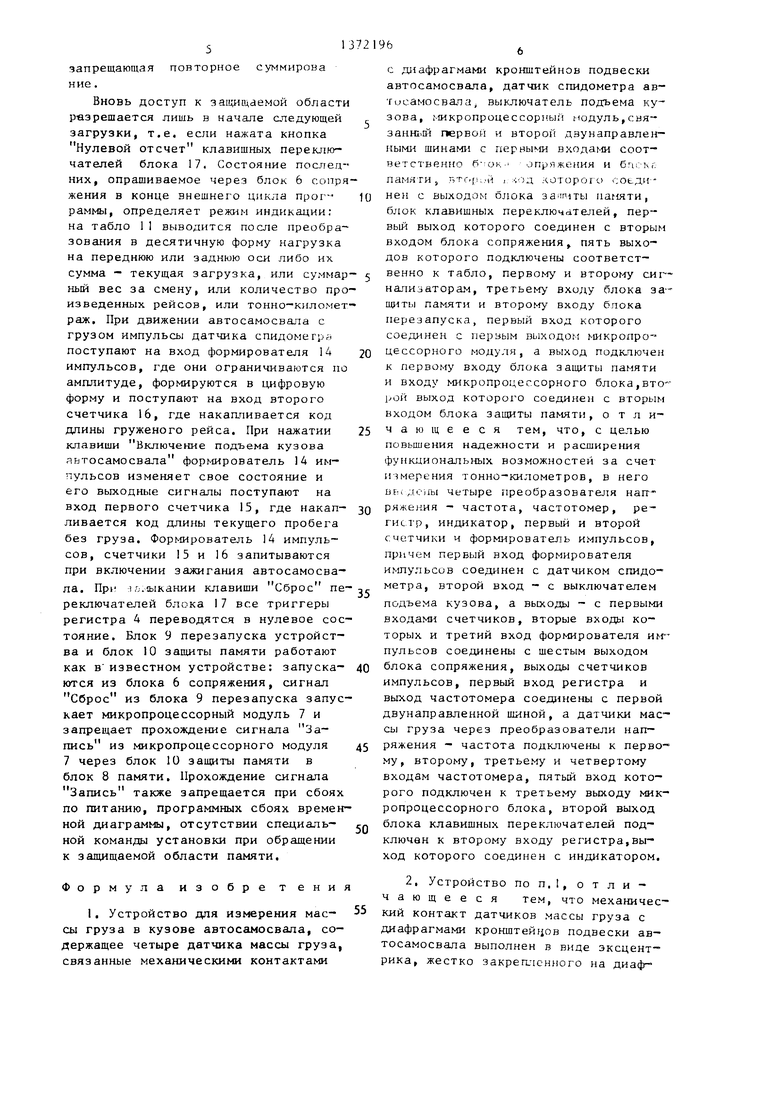
На фиг,1 показана структурная схема устройства; на фиг. 2 - узел установки датчика массы груза.
Устройство содержит четыре датчика 1 массы груза, четыре преобразователя 2 напряжение - частота (ПНЧ), частотомер 3, регистр 4, индикатор 5, блок 6 сопряжения, микропроцессор- ный модуль 7, блок 8 памяти, блок 9 перезапуска, блок 10 защиты памяти табло 11, первый 12 и второй 13 сигнализаторы, формирователь 14 импульсов, первый 15 и второй 16 счетчики, блок 17 клавишных переключателей, преобразовательный элемент 18 (фиг,2 эксцентрик 19, цанговый зажим 20,диафрагму 21 кронштейна и винты 22.
Датчики 1 массы груза через соот- ветствующие ПНЧ 2 соединены с четырьмя входами частотомера 3, пятый вход которого подключен к третьему выходу микропроцессорного модуля 7, вторая двунаправленная шина которого соединена с первым входом блока 8 памяти, первая двунаправленная шина - с первым входом регистра 4, выходом частотомера 3, выходами счетчиков 14 и 15 и первым входом блока 6 соп- ряжения, выходы которого соединены соответственно с табло 11, первым 12 и вторым 13 сигнализаторами, вторым входом блока 9 перезапуска, третьими входами блока 10 защиты па- мяти, формирователя 14 импульсов,первого 15 и второго 16 счетчиков.Вторые входы счетчиков 15 и 16 подключены к выходам формирователя 14 импульсов, при этом первый и второй входы .последнего соединены соответственно с выходами датчика спидометра и включателем подъема кузова автосамосвала (не показаны). Первый вход блока 9 перезапуска соединен с первым вы- ходом микропроцессорного модуля 7, вход которого соединен с выходом блока 9 перезапуска и первым входом блока 10 защиты памяти, второй вход последнего подключен к второму выходу микропроцессорного модуля 7, а выход - к второму входу блока 8 памяти. Второй вход блока 6 сопряжения подключен к первому выходу блока 17 клавишных переключателей, второй выход которого соединен с вторым входом регистра 4, выход последнего подключен к индикатору 5. Механический контакт преобразовательного элемента 18 датчиков I массы груза с диафрагмами 21 кронштейнов подвески автосамосвала выполнен в виде эксцентрика 19, жестко закрепленного с помощью цангового зажима 20 на диафрагме 2I кронштейна . с возможностью изменения и последующей фиксации углового положения эксцентрика 19 в плоскости измерения перемещения диафрагмы 21 кронштейна подвески автосамосвала.
Устройство работает следующим образом.
При включении питания в датчиках I формируются выходные напряжения, пропорциональные нагрузке диафрагм 21 соответствующих крони тейнов авто- самосвала. При загрузке происходит перемещение эксцентрика 19 (фиг.2), жестко связанного цанговым зажимом 20 с центром диафрагг 2 1 . Штырь преобразовательного элемента 18 благодаря упругости конструкции последнего отслеживает положение эксцентрика 19 относительно корпуса датчика I жестко закрепленного винтами 22 на краю диафрагмы 21. Выходные напряжения датчиков 1 поступают на соответ- ствуюише входы 1Б1Ч 2, где преобразуются в частоты с рабочим диапазоном 200 Гц - 50 кГц. Также при включении питания из блока 9 перезапуска в микропроцессорный модуль 7 поступает сигнал Сброс и последний начинает с адреса О выполнять программу, находящуюся в блоке 8 памяти. По командам программы происходит обнуление регистра 4, предустановка регистров микропроцессорного модуля 7 и установка (через блок 6 сопряжения) запрещающей сигнализации: зажигается первый (красный) сигнализатор 21,погашен второй (зеленый) сигнализатор 13.
Основная программа начинается тестовым блоком диагностики элементов устройства: из микропроцессорного модуля 7 через блок 6 сопряжения на табло 11 поступают сигналы, включающие все сегменты индикаторов на заданное время (время включения и прогрева датчиков 1 при нормальней работе остальных элементов устройства). В это время проверяется алго-
ритм функционирования микропроцессорного модуля 7, блока 8 памяти,блока 9 перезапуска, блока 10 защиты памяти и блока 6 сопряжения, по командам микропроцессорного модуля 7 измеряются выходные частоты ПНЧ 2 (задаются временные интервалы измерения, в частотомер 3 поступает из микропроцессорного модуля 7 образцовая час- тота 1,037 мГц),. результаты измерений читаются микропроцессорным модулем 7, записываются в блок 8 памяти, анализируется принадлежность текущих значений частот к рабочему диапазону При выходе из рабочего диапазона частоты i-ro ПНЧ 2 из микропроцессорного модуля 7 устанавливается i-й триггер регистра 4 и загорается i-й светодиод индикатора 5. При нормаль- ной работе датчиков 1, ПНЧ 2, частотомера 3 и указанных выше элементов устройства на табло 11 высвечивается набор букв, указывающий нормальную работу устройства,
После тестовой процедуры пррвый сигнализатор 12, запрещающий погрузку, гаснет и загорается второй (зеленый) сигнализатор 13 - погрузка разрешена. В это же время микропроцес- сорный модуль 7 переходит на ветвь основной программы, в которой последовательно п раз измеряются частоты ПНЧ 2 и результаты измерений S ,
(i 1,..., п; J 1,...,4) накапливаются в виде массива размерностью 4 - п байт в блоке 8 памяти. Далее определяется среднее значение S показаний каждого ПНЧ 2 и анализируется весь массив: если S- выходит из
рабочего диапазона частот, зажигаются соответствующие светодиоды индикатора, вычисляются разности /S,.-S./ и определяется их количество т, превышающее значение 0,25 Б , Если , программа вновь повторяет опрос ПНЧ 2, если m п/2, вычисляются новые средние значения S без учета m выпадающих значений.
При нажатой кнопке Нулевой отсчет клавишных переключателей блока 17 значения S заносятся в защищаемую область блока 10 памяти как нулевые отсчеты датчиков: S .° S , При отпущенной кнопке Нулевой отсчет разности Б - Б° сравниваются с последовательным рядом значений SjM/5,, .. ,S j.|,, где Б j - показания j-ro ПНЧ 2 при номинальной загрузке.
0 5
л
5
..
0
,
Если анализируемая разность лежит в интервапе КБу„/5, (k+l), то разность Б . - Бу умножается на нормировочный коэффициент л HI , полученный в результате калибровочных испытаний. Полученньш результат Б,- определяет нагрузку на J-й кронштейн подвески автосамосвала в тоннах, при этом Б, + Бу определяет нагрузку на переднюю ось. Б, +8 -на заднюю, Б; - нагрузка автосамосвала. При Б, + Б, 7/ 0,8 -Б формируется мигающая 1 в первом разряде двухраз- рядного слова состояния загрузки,которая через блок 6 сопряжения поступает на сигнализаторы 12 и 13, и в данном случае начинает мигать первый сигнализатор 12. При БЗ + ,8 Б | начинает мигать второй сигнализатор 13. - Б l - номинальные нагрузки на переднюю и заднюю оси. При Б, + + , 8 + формируется слово состояния Ю - загорается первый сигнализатор 12 и гаснет второй сигнализатор 13. Погрузка закончена и запрещена. Если в течение последукг- щих N циклов измерения слово состоя, ния не изменится, то загрузка считается полной, после чего опрашивается ячейка защищаемой памяти, разрешающая модификацию ячеек, хранящих об- вес груза, перевезенного за смену, число рейсов, тонно-километраж, пробег без груза. Если модификация разрешена, выполняется суммирование результата текущей загрузки с общим весом ранее перевезенного груза,инк- рементируется содержимое ячейки-счетчика рейсов, выбирается содержимое первого счетчика 15 (длина последнего рейса без груза) и суммируется с содержимым ячейки - пробег без груза, выбирается содержимое второго счетчика 16 (длина последнего рейса с грузом), рассчитывается тонно-километраж последнего рейса и суммируется с соответствующей ячейкой заш 1щаемой области блока 8 памяти, запоминается значение загрузки текущего груя еного рейса для расчета его тонно-километража при последующей погрузке,Далее микропроцессорным модулем 7 через блок 6 сопряжения производится сброс счетчиков 15 и 16 и начальная установка (в состояние измерения груженого рейса) формирователя 14 импульсов. После указанных операций в блок
8 памяти записьшается метка ,
запрещающая повторное суммирова ние.
Вновь доступ к за11;ищаемой области рвзрешается лишь в начале следующей загрузки, т.е. если нажата кнопка Нулевой отсчет клавишных переключателей блока 17. Состояние посггед- них, опрашиваемое через блок 6 сопряжения в конце внешнего цикла прог-- раммы, определяет режим индикации: на табло 11 выводится после преобразования в десятичную форму нагрузка на переднюю или заднюю оси либо их сумма - текущая загрузка, или суммар ный вес за смену, или количество произведенных рейсов, или тонно-километраж. При движении автосамосвала с грузом импульсы датчика спидомегрй поступают на вход формирователя 14 импульсов, где они ограничиваются по амплитуде, формируются в 1Ц1фровую форму и поступают на вход второго счетчика 16, где накапливается код длины груженого рейса. При нажатии клавиши Включение подъема кузова льтосамосвала формирователь 1Д импульсов изменяет свое состояние и его выходные сигналы поступают на вход первого счетчика 15, где накап- ливается код длины текущего пробега без груза. Формирователь 14 импульсов, счетчики 15 и 16 запитываются при включении зажигания автосамосвас диафрагмами крошдтейнов подвески автосамосвала, датчик спидометра ав- тисамосвала; выключатель подъема кузова, микропроцессорным иадуль,сня- первой и второй двунаправленными шинами с первы ш входами соответственно опряжения и . памяти, БТ1г.1;;й J :; )д яоторого соь.ди-- нен с выходом блока памяти, блок клавишных переключателей, первый выход которого соединен с вторым входом блока сопряжения,, пять выходов которого подключены соответственно к табло, первому и второг-гу сигнализаторам, третьему- входу блока за- Щ1ТЫ памяти и второму входу блока перезапуска, первый вход которого соединен с первым выходом микропроцессорного модуля, а выход подключен к первому входу блока защиты памяти и входу микропроцессорного блока,вто рой выход которого соединен с вторым входом блока памяти, отличающееся тем, что, с целью повышения надежности и расширения функциональных возможностей за счет измерения тонно-километров, в него БЕ:.: ДОНЫ четыре преобразователя нап ряжелия - частота, частотомер, ре- гис.тр, индикатор, первый и второй счетчики ч формирователь импульсов, причем первый вход формирователя и myльcoв соединен с датчиком спидо
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля загрузки | 1987 |
|
SU1476322A1 |
| Устройство для измерения массы груза в кузове автосамосвала | 1985 |
|
SU1290085A1 |
| Способ контроля массы груза и устройство для его осуществления | 1988 |
|
SU1550328A1 |
| УСТРОЙСТВО КОНТРОЛЯ МАССЫ ГРУЗА, ПЕРЕВОЗИМОГО САМОСВАЛОМ, И ПОДВЕСКИ КАРЬЕРНОГО САМОСВАЛА | 2005 |
|
RU2311620C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА ТРАНСПОРТНЫХ СРЕДСТВ | 1997 |
|
RU2116630C1 |
| Устройство для управления движе-НиЕМ АВТОТРАНСпОРТА | 1979 |
|
SU822229A1 |
| Многоканальное устройство для управления движением транспортного средства | 1989 |
|
SU1702395A1 |
| УСТРОЙСТВО ДЛЯ УЧЕТА РЕЙСОВ АВТОСАМОСВАЛОВ | 2000 |
|
RU2184992C1 |
| СИСТЕМА РЕГИСТРАЦИИ И КОНТРОЛЯ РЕЙСОВ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2586860C2 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ СТРОИТЕЛЬНЫХ ГРУЗОВ | 2003 |
|
RU2243592C1 |
Изобретение относится к весоизмерительной технике. Цель изобретения - повышение надежности и расширение функциональных возможностей устр-ва за счет измерения тонно-километров. По командам микропроцессорного модуля (мм) 7 измеряются выходные частоты преобразователей 2, результаты измерений читаются ММ 7, записываются в блок 8 памяти, анализируется принадлежность текуш 1х значений частоты к рабочему диапазону. При нормальной работе элементов устр-ва на табло 11 высвечивается набор букв, указывающий его нормальную работу. Загорается сегмент индикаторов - нагрузка разрешена. Определяется среднее значение показаний каждого преобразователя 2. Полученный результат определяет нагрузку на кронштейны подвески автосамосвала в тоннах. После полной загрузки опрашивается ячейка защищаемой памяти блока 10, разрешающая модификацию ячеек. Если она разрешена, выполняется суммирование результатов текущей загрузки с общим весом ранее перевезенно- го груза, выбирается содержимое счет- « чика 15-и суммируется с содержимым ячеек - пробег без груза. Выбирается содержимое счетчика 16, рассчитанное в тонно-километрах последнего рейса, и суммируется с соответствующей ячейкой блока 8 памяти. В последнем записывается метка, запрещающая повторное суммирование. 1 з.п. ф-лы, 2 ил. О) со ю со Ot) CSC/
ла. При :1/,:.1Ыкании клавиши Сброс пе-35 , второй вход - с выключателем
реключателей блока I7 все триггеры регистра 4 переводятся в нулевое состояние. Блок 9 перезапуска устройства и блок 10 защиты памяти работают как в известном устройстве: запуска- 40 ются из блока 6 сопряжения, сигнал Сброс из блока 9 перезапуска запускает микропроцессорный модуль 7 и запрещает прохождение сигнала Запись из микропроцессорного модуля ДЗ 7 через блок 10 защиты памяти в блок 8 памяти. Прохождение сигнала Запись также запрещается при сбоях по питанию, программных сбоях временной диаграммы, отсутствии специаль- Q ной команды установки при обращении к защищаемой области памяти.
подъема кузова, а выходы - с первыми входами счетчиков, вторые входы которых и третий вход формирователя иьг пульсов соединены с шестым выходом блока сопряжения, выходы счетчиков импульсов, первый вход регистра и выход частотомера соединены с первой двунаправленной шиной, а датчики мае cbj груза через преобразователи напряжения - частота подключены к перво му, второму, третьему и четвертому входам частотомера, пятый вход которого подключен к третьему выходу мик ропроцессорного блока, второй выход блока клавишных переключателей подключен к второму входу регистра,выход которого соединен с индикатором.
Формула изобре т ения
0 З Q
5
подъема кузова, а выходы - с первыми входами счетчиков, вторые входы которых и третий вход формирователя иьг пульсов соединены с шестым выходом блока сопряжения, выходы счетчиков импульсов, первый вход регистра и выход частотомера соединены с первой двунаправленной шиной, а датчики мае- cbj груза через преобразователи напряжения - частота подключены к первому, второму, третьему и четвертому входам частотомера, пятый вход которого подключен к третьему выходу микропроцессорного блока, второй выход блока клавишных переключателей подключен к второму входу регистра,выход которого соединен с индикатором.
2, Устройство по п.1, отличающееся тем, что механический контакт датчиков массы груза с диафрагмами кpoнштeй ioв подвески автосамосвала выполнен в виде эксцентрика, жестко закреггченного на диаф
рагме кронштейна посредством цанго- жения эксцентрика в плоскости иэмере- вого зажима с возможностью изменения ния перемещения диафрагм 1 кронштей- и последующей фиксации углового поло- на подвески автосамосвала.
ХУ СУ Х-ОС ХУ чХУчУ
-Г
19 20
/S
/S
Фиг. 2
| Устройство для взвешивания груза в автосамосвале | 1982 |
|
SU1049751A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения массы груза в кузове автосамосвала | 1985 |
|
SU1290085A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
