1
Изобрегение относится к области авгомагикй, в частности к следящим системам автокомпенсаторов.
:Извесгны-следящие системы, содержащие бесколлекторные двигатели постоянного тока l .
Из известных систем наиболее близкой по технической сущности к изобретению является следящая система, сод жащая усилитель, к первому и второму входам которого подключены соогветственно зада тчик и датчик обратной связи, механически соединенный с валом бесколлекторно- го двигателя, подключенного к коммутато ру, первый вход которого соединен с выходом широтно-импульсного модулятора
И.
в такой следящей. системе команда о модуле и о знаке момента двигателя поступает от усилителя к двигатето по одному каналу.
Команда о модуле момента заключена в модуле напряжения, а команда о знаке момента - в фазе этого напряженно.
В слешпцих системах, имеющих один канал для передачи команд о модуле и фазе момента двигателя, необходимый коэффициент усилителя ky,определяется равенством т -. iL
напряжение на выходе усиЯии
«flp теля, при котором ненагру- жеиный двигатель начинает вращаться, (В)}
- момент нагрузки, (гсм)|
М,
- козффнпиент усиления двигаO-W ГСМ .
)Теля до моменту ()
, В
д - напряжение на входе усилителя, при котором нагруженный двигатель должен вращаться - чувствительность (В).
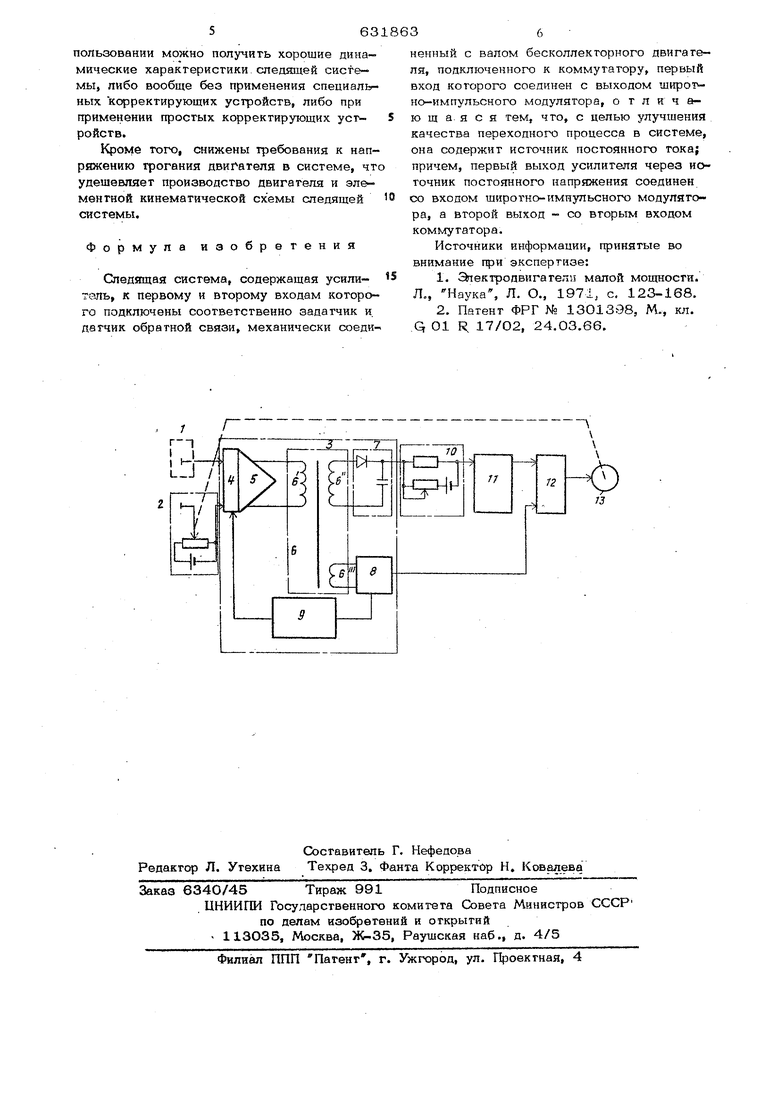
Полное усиление К (добротность) в следящей системе при прочих равных усло нях прямо пропорциональна значению К , а динамические свойства системы - перерегулирование, число колебаний, еремя переходного процесса - тем хуже, чем выше ее добротность, г.е. чем больше К у (при прочих равных условиях). Недостатком данной след$пцей системы является низкое качество переходного процесса в системе. Целью изобретения является улучшение качества переходного процесса в системе. Эта цель достигается тем, что в предложенную следящую систему введен источник постоянного токе Первый выход усилителя через источник постоянного напряжения соединен со входом широтно-импуль сного модулятора, а второй выход - со вторым входом коммутатора. Таким образом, в систему введен отдельный канал для передачи от усилителя к двигателю команды о знаке момента дви гателя и отдельный канал для передачи ог усилителя к двигателю команды о модуле момента двигателя, а в канал команды о модуле момента -дополнительный источник напряжения посг оянного тока И, , направленного согласно с командой о модуле момента. При этом усиление необходимое для получения прежней чувствительности следящей системы определяется по форму- Значение выбрано лишь немного меньше, чем сумма «-РЧ 9« Очевидно, что при этом вначение U значительно меньше, чем К « вательно, меньше Ир и пучше динамические свойства следящей системы при прежнем значении чувствительности. На чертеже представлена структурная схема следящей системы Система содержит задатчик 1, датчик обратной связи 2, усилитель 3, состоящий из модулятора 4, усилителя переменного напряжения - 5, выходного трансформатора в, с первичной- обмоткой в и BTopHH-ными обмотками б и 6 , выпрямителя 7, демодулятора 8 и источника опорногю напряжения 9, источник постоянного напри жения 10,-широтно-импульсный модулятор 11, коммутатор 12 и бесколлекторный д6 гагаль 13. Следшцая система работает следующим образом. Разность измеряемого напрягкення с за дагчика 1 и напр51жения офатной связи с датчика 2 посгупаег на вход усилителя 3 6 34 де преобразуется модулятором 4, подкл1оченным к источнику опорного напряжения 9 напрянсение переменного тока, усиливает я усилителем 5 и поступает на обмотку 6 трансформатора 6. Напряокение его обмотки 6 выпрямляется выпрямителем 7 и поступает на вход модулятора 11, где преобрауется в импульсную форму. Скважность тих импульсов пропорциональна входному напряжению модулятора 11. Это импульсное напряжение поступает на входов коммутатора 12 двигателя 13 и воздействует в коммутаторе на силовой ключ .(на чертеже не показан) так, что ключ подключает фазу двигателя к источнику напряжения ее питания циклически - внутри каждого цикла, определяемого датчиком., положения рогора двигателя. Помимо этого, имеется другая более высокочастотная цикличность, определяемая частотой модулятора 11. Эта последняя имеет переменную скважность. В результате среднее значение тока в фазе двигателя (а следовательгно, и момент двигателя) на интервале ее включения пропорционально скважности выходного сигнала модулятора 11. Таким образом, регулируется модуль момента двигателя 13. Напря5кение с обмотки 6 трансформа - тора демодулируется однополупериодным демодулятором 8, подключенным к источнику опорного напряжения 9, гак, что. на выходе демодулятора 8 сигнал существует при одной фазе выходного напряжения усилителя 3 и отсутствует при ее изменении на 180 , т.е. при другой полярности напряжения небаланса на входе усилителя. Вы- .ходное напряжение демодулятора 8 поступает (или не поступает) на второй вход коммутатора 12, где воздействует на усилитель (на чертеже не показан), который включен между датчиком положения ротора и силовым ключом фазы таким образом, что пря наличии напряжения на выходе демодулятора 8 этот усилитель работает как повторитель сигнала датчика положения ротора ДБИгагепя, а при отсутствии сигнала, на выходе этого демодулятора усилитель работает как устройство, поворачивающее: фазу сигнала датчика на 180 (инвертор), что приводит к .изменению знака момента двигателя 13 на противоположный. Для правильного функционирования следящей системы полное усиление по каналу знака устанавливается большим, чем по каналу модуля. Технико-экономический эффект изобр&генйя еаключаегся в том, что гфн его иопользовании можно получить хорошие динамические характеристики следящей системы, либо вообще без применения специальгиых корректирующих устройств, либо при применении простых корректирующих устройств.
Кроме того, снижены требования к напряжению грогания двих ателя в системе, чт удешевляет производство двигателя и элемен гной кинематической схемы следящей системы.
Формула изобретения
Следящая система, содержащая усилиталь, к первому и второму входам которого подключены соответственно задатчик и. датчик обратной связи, механически соединенный с валом бесколлекторного двигателя, подключенного к коммутатору, первый вход которого соединен с выходом широтно-импульсного модулятора, отличающаяся тем, что, с целью улучшения качества переходного процесса в системе, она содержит источник постоянного тока; причем, первый выход усилителя через иоточник постоянного напряжения соединен со входом широтно-импульсного модулятора, а второй выход - со вторым входом коммутатора.
Источники информации, принятые во внимание при экспертизе:
1.31ектродБИгателн малой мощности. Л., Наука, Л. О., 1971, с. 123-168.
2.Патент ФРГ № 13О1398, М., кл. Q 01 R 17/02, 24.03.66.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1979 |
|
SU873205A2 |
| Реверсивный вентильный электропривод | 1988 |
|
SU1598097A1 |
| Следящая система | 1986 |
|
SU1564589A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2012991C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ МОМЕНТА МАХОВИЧНОГО ДВУХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ ТОЧНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 1968 |
|
SU1840055A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2354036C1 |
| Устройство для цифрового управления асинхронным двигателем | 1974 |
|
SU688974A1 |
