Предметом настоящего изобретения является устройство для дистанционной передачи угла ловорота с датчиком, выполненным в 1шде д&ухоб моточного дросселя (или трансформатора) с подвижным магнитопровадОм, И с приемником логометрического типа. В таком усггройстве, согласно изобретению, с целью достижения поворота указанlioro магнитопровода в -пределах по.чной окружности, предлагается указанный магнитонровод вьтолНЯть в: виде двух дугообразных пластин, маГНитно соедиеённых через радиальные держатели и ось вращения и расположенных в параллельных плоскостях у сдвинутых друг относительно друга вокруг оси вращения на 90° крайних полюсов Ш-о5разного неподвижного магнитопровода. Крайние сердечники последнего несут обмотки, а средний своим полюсом расположен у оси вращения подвижного магнитопровода в промежутке 1М1ежду дугообразными пластинами. В видоизменённом устройстве на 90° смещены не крайние пошюсы непод1вижного М1агнитопровода, а дугообразные пластины поворотного магнитолровода.
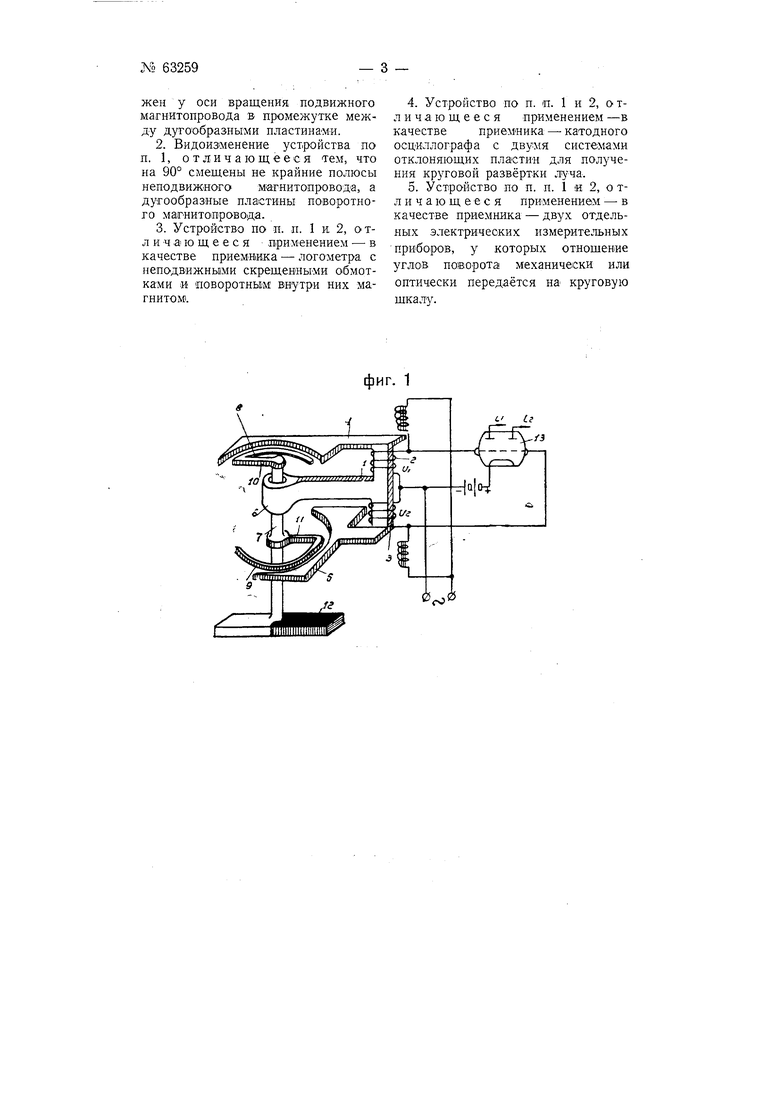
Сущность изобретения поясняется чертежом, на фиг. 1 которого схематически изображён датчик предлагаемого устройства, а на фиг. 2-6 различные варианты приемиика.
Датчик выполнен в виде двухобмоточного дросселя (или трансформатора). Неподвижный магнитопровод 1 дросселя имеет Ш-образную форму. Крайние его сердечники несут обмотки 2 и 3; полюсы 4 и 5 крайних сердечников расположены в параллельных плоскостях со сдвигом в 90° друг относительно друга. Средний сердечник своим полюсом 6 .расположен у оси 7 вращения подвижного магнитопровода; последний состоит из двух дугообразных пластин 8 и 9, магнитно связанных друг с другом через радиальные держатели 10 и 11 и ось 7. Последняя механически соединена с подвижной (поворотной) частью первичного измерительного прибора 12, на1дример, компаса.
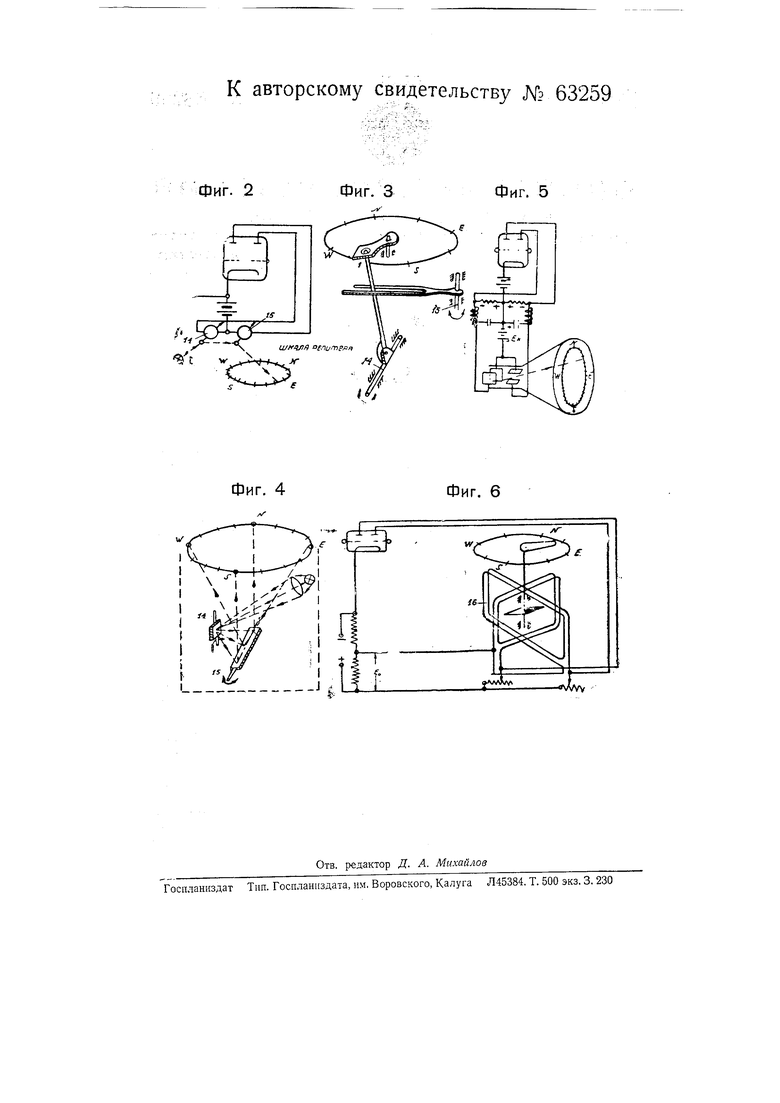
При повороте подвижного магнитопровода 7-11 (ротора) вокруг оси 7 магнитное сопротивление Miarнитной цепи одной из обмоток 2-3 уменьщается, а другой - увеличивается; соответственна этому индуктивиоетЬ первой обмотки увеличивается, а второй уменьшается; соответственно величинам индуктйвностей будут изменяться напряжения Ui и LJa на обмотках 2 и 3. .Эти, дацряження.подлфт.ся„на сетки лампового; ьшряхшт:efя: 13. С выхода выпрямителя токи ii и ia подаются по линий СВЯЗИ к йриемнику. Поскольку мощност.ь от датчика не - потребляется; момент Ьйлы воздействия на ротор -может быть сделан как угодно м(алы1М. Когда напряжение на сетке лампы имеет наибольшее значение, анодный ток соответственно максимален (imax), при среднем значении - имеет значение imed, а когда напряжение минвмально - равен нулю (это легко достигается подбором напряжения смещения). Если принять показанное на фиг. 1 положение ротора датчика за исходное, то |при враш,ении комПаса 12 по часовой стрелке изменение токов ii и 12 происходит следуюш, образом: Угол поворота стрелки Ui UaijJ-2 компаса m X med imei0 0med. max med Токи ii И ig Пропускаются B приемнике через индикатор, содержаший две подвижные системы 14 и 15 типа применяемых в приборах для измерения силы тока (фиг. 2). Получить сопряжение отклонений этих мехаиизмов, обеспечивающее круговую развёртку, не предста-вл;яет -цруда-. Принцип механического разрешения этой задачи (такое решение, впрочем, не представляет реального практического интереса) показан на фиг. 3. На фиг. 4 показа принцип зер.кальной световой развёртки, более соверщенной. Возможно также использование катодного осциллографа; достоинством этого ва|риа«та является безинерционноагь. В этом случае выпрямленные токи ii и ia пропускаются через сопротивления. Наполовину сконпешированные (напряжением Ек) напряжения с этих сопротивлений управляют электроннъвм лучом (фиг. 5). Наконец на фиг. 6 показано использование для той же цели двойного гальваноскопа 16 (бесконтактный логометр состоит из двух неподвижных скрещенных катушек и вращающегося внутри них постоянного магнита), являющегося весьма чувствительны1М индикатором. Чтобы изменение токов в катущках сделать двусторонним , применена половинная компенсация их с помощью напряжения Ео Между датчиком и выпря1мителем1 возможно включение уси тителя или трансформатора, наличие которого, впрочем, не обязательно. Предлагаемая система, как и сельсин, обеспечивает прямую синхронную передачу показаний первичного измерительного прибора без применения обратной отработки. Предлагаемое устройство, естественно, может быть применено, для передами показаний, не только компаса, но и многих других измерительных приборов, в частности, трубки Бурдона, анероидной коробки, биметаллического термометра и т. д. и т. н. Предмет изобретен и-я 1. Устройство для дистанционной передачи .угла пово. с датчиком, выполненным а виде двухобмоточного д росселя (или транформатора) с ПОДВИЖНЫ1.М ма-гаитопроводом, и с приемником логометрического типа, отличающееся тем, что с целью достижения поворота указанного магнитопровода в пределах полной окружности, этот магнитопровод выполнен в виде двух дугообразных пластин, магнитно соединёеньрх 4eipe3 радиальные д.ержатели и ось вращения и расположенных в пара.ллельных. плоскостях у сдвинутых друг относительно друга вокруг оси вращения: на 90° крайних, полюсов. Щ-образного неподвижного матнитопровода, крайние сердечники которого несут обмотки, а средний своим полюсом расположен у оси вращения подвижного магнитопровода в промежутке между дугообразными пластинами.
2.Видоизменение устройства по п. 1, отличающееся тем, что на 90° смещены не крайние полюсы неподвижного магнитопровода, а дугообразные пластины поворотного магнитопровода.
3.Устройство по п. п. 1 и. 2, отл и ч .а ю щ е е с я прим енением - в качестве приемиика - логометра с неподвижными скрещенными обмотками и поворотным внутри них магнитож
4.Устройство по п. п. 1 и 2, а тличающееся применением-в качестве приемника - катодного осциллографа с двумя системами отклоняющих пластин для получения круговой развёртки .
5.Устройство по п. п. 1 я 2, о тл и ч а ю щ е е с я применением - в качестве приемника - двух отдельных электрических измерительных приборов, у которых отнощение углов по)ворота механически или оптически передаётся на круговую шкалу.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционной передачи угловых перемещений | 1941 |
|
SU63185A1 |
| Устройство для дистанционной передачи угла поворота | 1943 |
|
SU67547A1 |
| Индукционный датчик для передачи показаний прибора с круговым движением стрелки | 1941 |
|
SU62317A1 |
| Гиромагнитный дистанционный датчик курса | 1944 |
|
SU67814A1 |
| Чувствительный элемент для пилотажно-навигационных приборов | 1944 |
|
SU73321A1 |
| Датчик | 1943 |
|
SU66160A1 |
| Устройство для азимутальной коррекции гироскопа направления в автоматах курса от магнитного или т.п. компаса | 1943 |
|
SU67831A1 |
| Индукционная система синхронной передачи угла поворота | 1935 |
|
SU48684A1 |
| Датчик для дистанционной передачи прямолинейных перемещений | 1944 |
|
SU73303A1 |
| Дисстанционный компас | 1943 |
|
SU64168A1 |
фиг. 1
i if
Фиг. 2
Фиг. 5
й
Фиг. 6
«vwv
