Существующие устройства длй автоматического регулирования направления движения судов и самолетов по заданному курсу основаны на использовании системы гироскопов. В устройствах этого типа применяется азимутальная коррекция гироскопа направления относительно заданного курса, соответственно показаниям дистанционного комласа. Один из распространенных способов азимутальной коррекции основан на применении катущки, магнитное поле которой воздействует на постоянный магнит, укрепленный на. горизонтальной рамке карданова подвеса. Ток в катущку подается от специального потенциометра, установленного в указателе дистанционного магнитного компаса. Этот ток равен нулю при совпадении действительного и заданного магнитных курсов. Прл отклонении от заданного курса величина н направление тока коррекции зависят от величины и знака отклонения. Изменение заданного курса производится посредством установки коррекционного потенциометра в определенное положение по азимутальной шкале указателя дистанционного компаса.
Согласно изобретению, особенность предложенного аналогичного устройства, в котором магнигный или иной компас точно так же используется для управления включением серводвигателя датчика показаний путем изменения сопротивления коррекционного потенциометра, заключается в том, что для возможности использования в устройстве датчика показаний с малым направляющим моментом щетки коррекционного потенциометра насажены на вал серводвигателя датчика показаний, а сам потенциометр помещен в этот датчик и электрически соединен с потенциометром задатчика курса, к щеткам которого присоединена катущка коррекции.
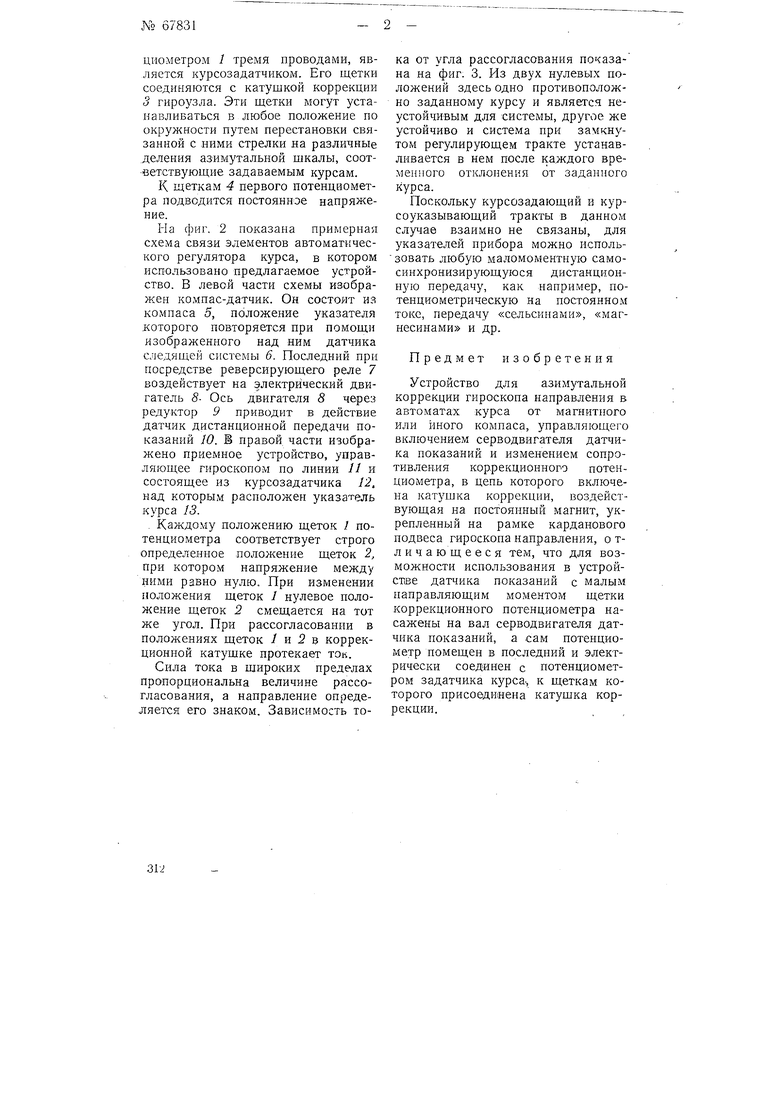
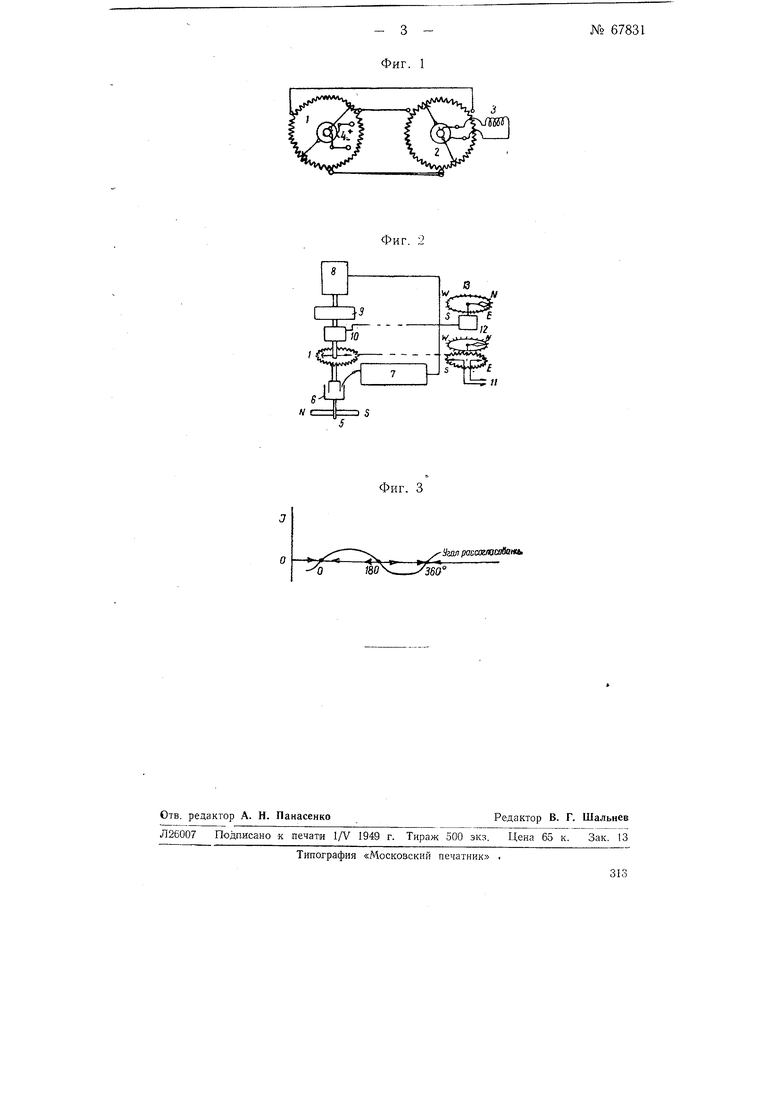
На фиг. 1 показана схема предлагаемого устройства; на фиг. 2-схема автоматического регулятора курса; на фиг. 3 - диаграмма изменения компенсационного тока в зависимости от угла рассогласования систем.
Кольцевой потенциометр 1 (фиг. I) установлен в магнитном узле хдистанционного компаса. Щетки его соединены со следящей осью и перемещаются при ее вращении. Потенциометр 2, соединенный с потен311
циометром 1 тремя проводами, является курсозадатчиком. Его щетки соединяются с катушкой коррекции 3 гироузла. Эти щетки могут устанавливаться в любое положение по окружности путем перестановки связанной с пими стрелки на различные .деления азимутальной щкалы, соответствующие задаваемым курсам.
К щеткам 4 первого потенциометра подводится постоянное напряжение.
На фиг. 2 показана примерная схема связи элементов автоматического регулятора курса, в котором использовано предлагаемое устройство. В левой части схемы изображен компас-датчик. Он состоит из компаса о, положение указателя которого повторяется при помощи изображенного над ним датчика следящей системы 6. Последний при посредстве реверсирующего реле 7 воздействует на электрический двигатель 8- Ось двигателя 8 через редуктор 9 приводит в действие датчик дистанционной передачи показаний 10. В правой части изображено приемное устройство, управляющее гироскопом по линии // и состоящее из курсозадатчика 12. над которым расположен указатель курса /5.
. Каждому положению щеток 1 потенциометра соответствует строго определенное положение щеток 2, при котором напряжение между ними равно нулю. При изменении положения щеток / нулевое положение щеток 2 смещается на тот же угол. При рассогласовании в положениях щеток / и .2 в коррекционной катущке протекает ток.
Сила тока в щироких пределах пропорциональна величине рассогласования, а направление определяется его знаком. Зависимость тока от угла рассогласования показана на фиг. 3. Из двух нулевых положений здесь одно противоположно заданному курсу и является неустойчивым для системы, другое же устойчиво и система при замкнутом регулирующем тракте устанавливается в нем после каждого временного отклонения от заданного курса.
Поскольку курсозадающий и курсоуказывающий тракты в данном случае взаимно не связаны, для указателей прибора можно использовать любую маломоментную самосинхронизнрующуюся дистанционную передачу, как например, потенциометрическую на постоянно.м токе, передачу «сельсинами, «магнесинами и др.
Предмет изобретения
Устройство для азимутальной коррекции гироскопа направления в автоматах курса от магнитного или иного компаса, управляющего включением серводвигателя датчика показаний и изменением сопротивления коррекционного потенциометра, в цепь которого включена катущка коррекции, воздействующая на постоянный магнит, укрепленный на рамке карданового подвеса гироскопа направления, о тличающееся тем, что для возможности использования в устройстве датчика показаний с малым направляющим моментом щетки коррекционного потенциометра насажены на вал серводвигателя датчика показаний, а сам потенциометр цомещен в последний и электрически соединен с потенциометром задатчика курса-, к щеткам которого присоединена катущка коррекции.
№ 67831
- 3 Фиг. 1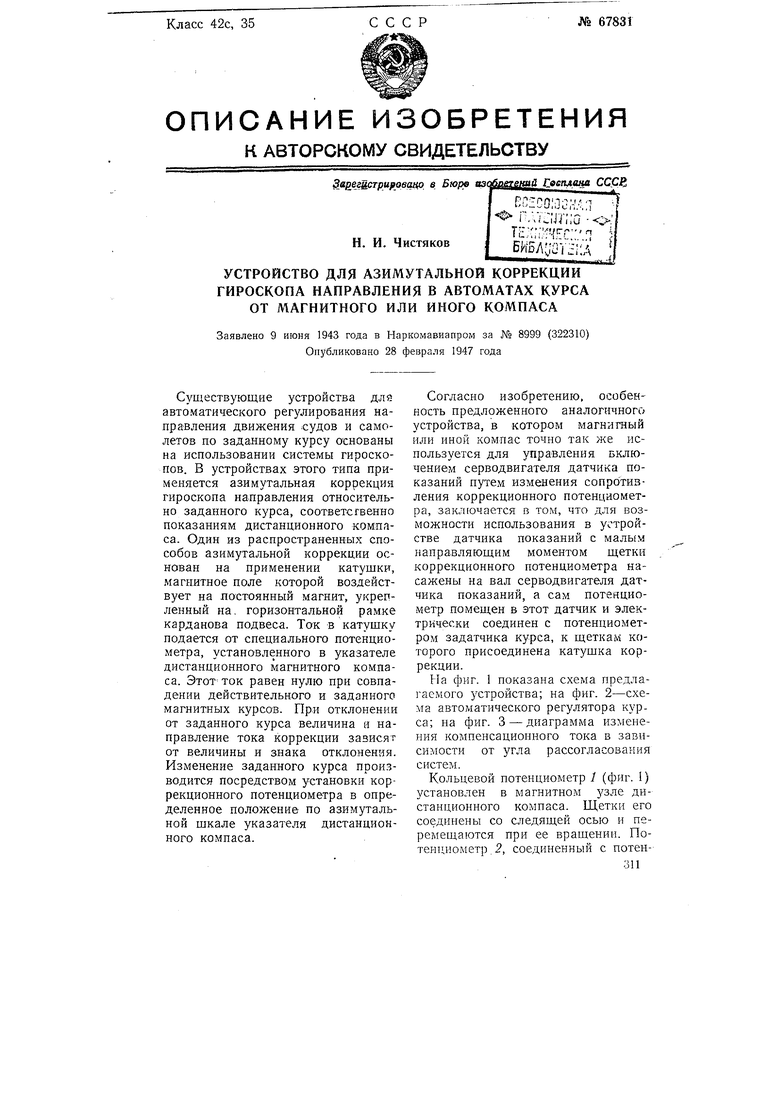
| название | год | авторы | номер документа |
|---|---|---|---|
| Гиромагнитный дистанционный датчик курса | 1944 |
|
SU67814A1 |
| Датчик | 1943 |
|
SU66160A1 |
| СПОСОБ ПРОВЕРКИ ИСПРАВНОСТИj | 1965 |
|
SU168470A1 |
| Гирополукомпас с аналитической азимутальной коррекцией | 2023 |
|
RU2799738C1 |
| Устройство для получения сигнала электрической коррекции автомата курса | 1944 |
|
SU66795A1 |
| Гирополукомпас с компенсацией температурного дрейфа | 2024 |
|
RU2818661C1 |
| Устройство для дистанционной передачи угла поворота | 1941 |
|
SU63259A1 |
| Устройство для дистанционной передачи угловых перемещений | 1941 |
|
SU63185A1 |
| ГИРОГОРИЗОНТКОМПАС ДЛЯ ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2062985C1 |
| Гирополукомпас | 2024 |
|
RU2826371C1 |
.г -
Фиг. 3
гl№ рассаг/ЮйЛи
360°
