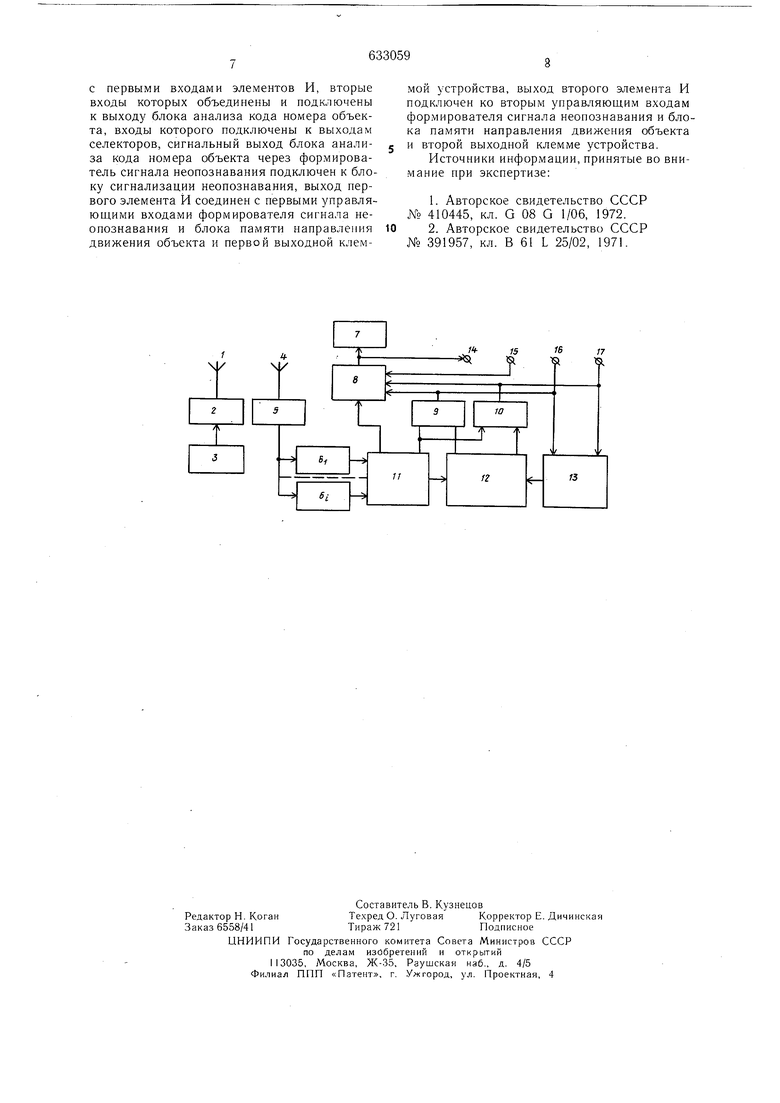
управляющими входами формирователя сигнала неопозназания и блока памяти направления движения объекта к первой выходной клеммой устройства, выход второго э пемента И подклю1ен ко вторым управляющим входам формгфОБзтеля сигна.та неопознаоания и блока памяти навравлеиия движется объекта и второй выходной клемме устройства. На чертеже дана блок-схема предлагаемого устройства. Здесь: 1 - передающая антенна; 2 - передатчик; 3- 6,1О1. кодирования; 4-- приемная антенна; 5 -приемник кода номера объекта; 6 - селекторы;. - блох сигнализации кеопозиавання; 8 - формирователь еигнала неопознаваиия; 9, 10 -элементы И; 11 - блок а1,алнза кода ь:омера объекта; 12-- блок анализа направления даижения объекта; 53 - блок памяти направления движения объекта; 14 - третья выходная кле.мма устройетва; 15 - входная клемма устройства; 6 и 17- первая и вторая выходные клеммы устройства. Устройство работает следующим , Ма подвижном объекте блоком 3 кодирования постоянно вырабатывается кодовая комбинация, состоящая яз п посылок сигналов с различными рабочими значениями кодовых признаков, соответствующая -юмеру объекта. Кодирование элементарных посылок сигналов осуществляется по нескольк1 М взаимонезависимым кодоз гм признакам. С выхода блока кодир.овакия кодовые сигналы поступают на передатчик 2, даторый посредством антенны 1 передает их в капгл соязи. На пункта опознавания сигналы, передаваемые с подвижного объекта, вошед,иего в зону опознавания, принимаются приемником 5, соединенным с гпэнемной антенной 4. и поступают иа входы селекторов (рабочих значений кодового признака) 6i -6i, количество которых определяется методом кодирования и числом рабочих значений кодового признака. Последние осутдествляют проверку элементов принятой комбинации но кодовым признакам, после чего кодовая комбинация поступает в блок I1 анализа кода номера объекта, где она запоминается на время опознавания. С целью повышения информапиониой надежности устройства нри действии в канале связи интенсивных помех в устройстве принято m - кратное дублирование передачи кодовой комбинации, для чего параметры зоны опознавания устанавливаются такими, чтобы за время пребывания подвижного объекта в зоне опознавания с послед его принялось не менее m кодовых комбинаций, каждая из которых по аналогии записывается и запоминается на время опознавания в 1 блоке анализа кода номера объекта. Число повторений ш - кодовой комбинации устанавливается в зависимости от ннтеисивности помех в применяемом канале связн и требований к достоверности передачи информации. В блоке анализа кода номера объекта задается порог приема символов, осуществляется накопление значений каждой из п посылок в т-нмпульсных сериях и поэлементное сравнение накопленного числа с заданным порогом, после чего в формирователь 8 поступает сигнал, которым он подготавлнвается к контролю опознавания. Одновременно в блоке анализа кода номера объекта осуществляется анализ всей кодовой комбинации с целью установления ее соответствия одной из кодовых комбинаций, принятых для кодирования номеров объектов. При устарювлении указанного соответствия принятая кодовая комбинация поступает на общие входы элементов И 9 и 10 и в блок 12 анализа направления движения объекта. В блоке 12 анализа направления движения объекта осуществляется сравнение принятой кодовой комбинации с комбинациями, зaпиcaнFlыми в блоке 13 памяти направления движения объекта. В исходном состоянии, когда объект ранее не проходил в принятом для запо..-ииаиия направленпи, кодовая комбиня:пя, соответствующая инвентарному номеру этого объекта, в блоке памяти 13 отсутствует, н при сравнении принятой кодовой комбинаци с комбинациями, записанными в блоке памяти направления дви.жения объек1а, совпадения кодов не происходит. При этом на выходе блока 12 анализа направления движения , соединенного с элементом И 9, появляется сигнал, разрешающий прохождение кодовой комбинации через этот элемент И на клемму 16, что соответствует проследованию даиного объекта FJ прямом направлении. Одновременно код данного объекта поступает в блок 13 намяти направления движеиня объекта, где он запоминается до опознавания его нри обратно.м движении, и в форчирователь 3 сигнала 11еонознавапия, устанйвливая его в исходное состолкне, при котором формггрование сигнала иеонознавания не происходит. Юбъем 13 блока памяти направления движеиия объекта зависит от интенсивности движения объектов и рассчитывается на максимально возможное чиСТО объектов, которые могут проследовать пункт опознавания в принятом для заноминания направлении и одновременно находиться в этой части транспортной сети относительно этого пункта онознавапия. При следовании объекта в обратном направлении и попадании его в зону опознавания происходит выделение элементарных посылок кодовых комбинаций селекторами (рабочих значений кодового признака) 6i и анализ принятых кодовых комбинаций в блоке 1 анализа кода номера объекта, после
чего формирователь 8 сигнала неопознавания подготавливается к контролю опознавания, а принятый код объекта поступает на общие входы элементов И 9 и 10.
Однако при равнении принятой комбинации с комбинациями , записанными в блоке 13 памяти направления движения объекта, происходит совпадение кодов, поскольку объект уже проходил данный пункт опознавания в принятом для запоминания направлении и был записан в блоке памяти направления движения объекта. При этом на выходе блока 12 анализа направления движения объекта, соединенного с элементом И 10, появляется сигнал, открывающий элемент И 10. и принятый код номера объекта проходит на выход элемента И 10 и поступает на клемму 17, что соответствует проследованию объекта в обратном направлении.
Одновременно сигнал поступает в блок 13 памяти направления движения объекта на стирание ранее записанной кодовой комбинации, освобождая ячейку памяти для записи кода очередного объекта, и в формирователь сигнала неопознавания, устанавливая его в исходное состояние, при котором формирование сигнала неопознавания также не происходит.
Таким образом, при каждом появлении объекта в зоне опознавания осушестоляется подготовка формирователя сигнала неопознавания к контролю опознавания и, в случае правильности принятой кодовой комбииа ции, передача ее вместе с признаком направления движения объекта на центральный диспетчерский пункт. При этом сразу же после выдачи кода номера объекта осуществляется установка формирователя сигнала неопознавания в исходное состояние и сигнал на его выходе не формируется. При неисправной аппаратуре объекта при появлении его в зоне опознавания после подготовки формирователя сигнала неопознавапия к контролю опознавания сброс последнего не наступает, поскольку код объекта не проходит на входы элементов И 9 или 10, так как он не соответствует комбинациям, прш-ятым для кодирования номеров объектов, п на его появляется сигнал, включающий блок 7 сиг нализации неопознавания и поступающий на клемму 14, соединяемую с телемеханическим устройством передачи информации на центральный диспетчерский пункт.
Диспетчер принимает необходимые меры по ликвидации неисправности и посылает па данный пункт опознавания сигнал, поступающий из телемеханического устройства на клемму 15, которым формирователь 8 сигнала неопознавания устанавливается в исходное состояние, а блок 7 сигнализации неопознавания отключается.
С целью исключения повторного опознавания одного и того же объекта, следующего через зону опознавания с весьма малой скоростью, при которой m комбинаций принимается npiif MHHKOM кода номера объекта 5 неоднократно, либо при качаниях объекта около зоны опознавания, в блоке анализа направления движения объекта 12 предусмотрена блокировка, при которой вторичное опознавание одного и того же объекта возможно лищь через вполне определенное время, превыщающее время пребывания объекта в зоне опознавания.
В предлагаемом устройстве для одновременного определения номера и направления движения объекта используется один высокочастотный тракт, включающий в себя одну приемную антенну, образующую одну
зону опознавания. За счет этого упрощаются внеишие соединения аппаратуры на пункте ог оз 1аваиия, поскольку отсутствует необходимость установки допо;1нитсльноГ( антенны н соединение со с дополнительным приемппком кода, упрощается наладка п эксплуатацип устройства, так как но требуется жесткая ориентация антенн отпоснтельпо друг друга с целью создаш я нескольких зон опознавания и выдерживания их параметров, повышается надежность работы устройства в связи с отсутствие.м дополнительного высокочастотного тракта с виешнеГ антенной li расширяются границы исг1о.;1ьзован11н устронст«п. поскол1,ку опознаг.ягНС о6т ектог с;ало Еюзможны.м на участках ог1)аниче люй д.лип|,; на близлежащих соседних участках н т. д.
Помимо этого, п предложенном устройстве повышение надежности и помехозащнщенностп опозиавання достигается за счет придания элел1еитар ;ым посылкам кодовых комбинаций нескольких взайьияюзависпмы.х кодовых признаков, неоднократного дублирования кодовых , поэлементного анализа их и сравнения с комбн ациям, принятыми для кодировання номеров объектов.
Формула изобретения
Устройство для опредолепия номера и направления движущегося объекта, содержащее на объекте блок кодирования, подключенный через передатчик к передаюп1ей
антенне, на пункте опознавания - приемник кода номера o6T5eivTa, вход которого подк.,1почен к приемной а 1тенпе, выход - ко входам селекторов, блок анализа кода номера объекта, фор Ч1рО затель сигнала пеопознавания, блок С1 гнализации неопознавания, элементы И, блок памяти направления движения объекта, отличающееся тем, что, с целью yiipoHieHHH устройства и повышения его надежности, в него вселен блок анализа иаправлешш движения объекта, вход которого
соединен с выхо,11ами блока анализа кода полтора объекта и блока памяти, направления движения объекта, выходы блока анализа направления движения объекта соединены
с первыми входами элементов И, вторые входы которых объединены и подключены к выходу блока анализа кода номера объекта, входы которого подключены к выходам селекторов, сигнальный выход блока анализа кода номера объекта через формирователь сигнала неопознавания подключен к блоку сигнализации неопознавания, выход первого элемента И соединен с первыми управляющими входами формирователя сигнала неопознавания и блока памяти направления движения объекта и первой выходной клеммой устройства, выход второго элемента И подключен ко вторым управляюш,им входам формирователя сигнала неопознавания и блока памяти направления движения объекта и второй выходной клемме устройства.
Источники информации, принятые во внимание при экспертизе:
1 Авторское свидетельство СССР № 410445, кл. G 08 G 1/06, 1972. 2. Авторское свидетельство СССР № 391957, кл. В 61 L 25/02, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для опознавания движущегосяОб'ЕКТА | 1979 |
|
SU836647A1 |
| Устройство для определения номера и направления движения объекта | 1978 |
|
SU777663A1 |
| Устройство для контроля и учета подвижных объектов | 1983 |
|
SU1149301A1 |
| Устройство для автоматическогоОпРЕдЕлЕНия HOMEPA и НАпРАВлЕ-Ния дВижЕНия Об'ЕКТА | 1979 |
|
SU798951A1 |
| Устройство для централизованного контроля и управления движением транспортных средств | 1985 |
|
SU1317467A1 |
| Устройство для регистрации подвижных объектов | 1984 |
|
SU1211790A1 |
| Устройство для регистрации подвижных объектов | 1987 |
|
SU1492356A1 |
| Устройство для опознания номеров транспортных средств | 1980 |
|
SU951353A1 |
| Устройство для опознавания железнодорожных вагонов | 1988 |
|
SU1558753A1 |
| Устройство телесигнализации | 1983 |
|
SU1149297A1 |
