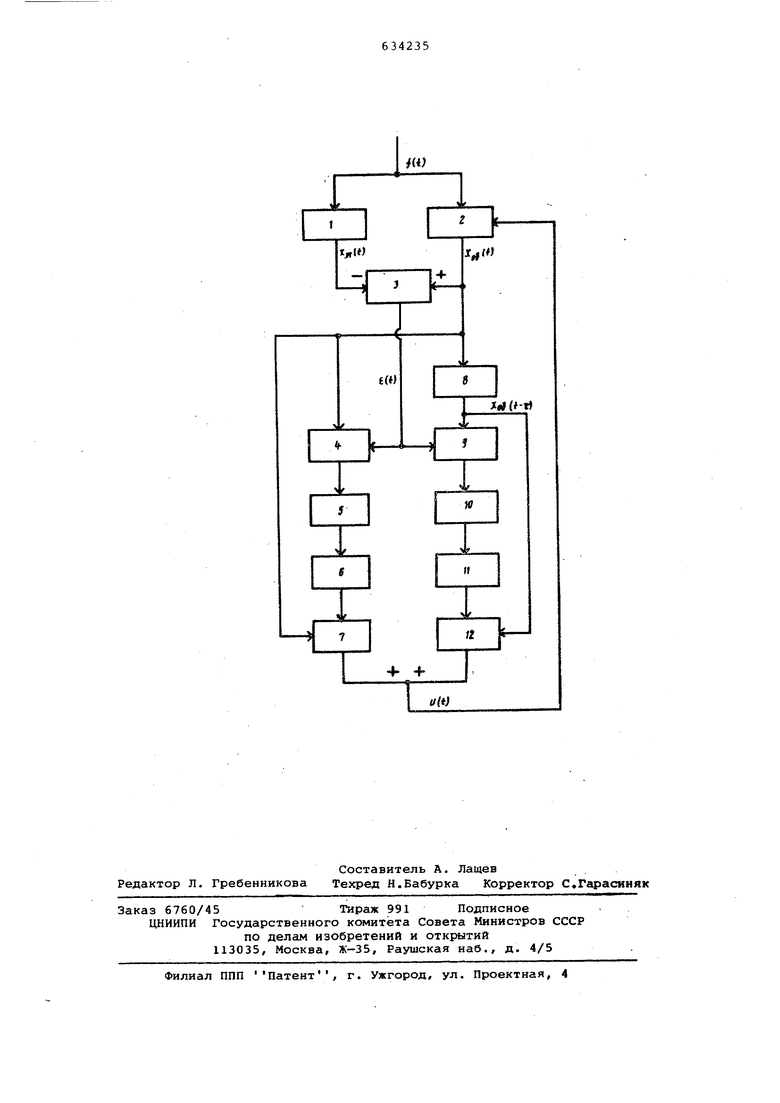
Устройство работает следующим образом.
На вход эталонной модели 1 поступает внешний сигнал f(i) , а выходиой сигнсш эталонной модели )
поступает на блок 3 сравнения. На вход объекта 2 регулирования поступает внешний сигнал f(t) , а также управляющий сигнал U(t) .Выходной сигнал объекта 2 регулирования X(t) поступает на блок 3 сравнения, на блок 8 задержки, а также на умножители 4 и 7. Выходной сигнал f(i) блока 3 сравнения вида f(t (-t)-X3(i) поступает на первый и на третий умножители 4 и 9,
Выход первого умножителя 4, равный (i , поступает на первый усилитель 5, на выходе которого получается сигнал (-у,)-Хд (t)-f(f). Первый интегратор 6 интегрирует уравнениеot(t)-r,)(t),ct.(o).-O, и его выходной сигнал otCt) умножается во втором умножителе 7 на (t) . На выходе второго умножителя 7 получается сигнал, равный 0(4)Xgj(t) . Так раработает одна цепь регулятора.. Вторая цепь регулятора состоит из блоко 8-12. На вход блока 8 задержки поступает сигнал XjjjCt), а на выходе формируется сигнал XpjCt-C), Величина запаздывания Т может изменяться с тем, чтобы обеспечить хорошее качество регулирования объекта.
Выходной сигнал блока 8 задержки поступает на третий и четвертый умножители 9 и 12, выход третьего умножителя 9, равный )(), поступает на второй усилитель 10,выходной сигнал которого paBeHiT od Второй интегратор 11 интегрирует уранение p.(i)«-Tr2Xoj(t--CK(-t),ft(o).o , .
и его выходной сигнал p(ij . умножается в четвертом умножителе 12 на X jjCt-T). Сумма выходных сигналов умно|жителей 7 и 12 образует управляющий сигнал и(-Ь)«о1.а))1,а)Х,«-г),который поступает на объект 2 регулирования. Достижение в таком самонастраивающемся устройстве цели регулирования, состоящей в уменьшении отклонения выходного сигнала объекта с запаздыванием от выходного сигнала, эталонной модели, позволяет применять его в различных системах регулирования объектов с .запаздыванием.
Формула изобретения
Самонастраивающаяся система для регулирования объектов с запаздыванием, содержащая последовательно соединенные эталонную модель, блоки сравнения, первый-умножитель, первый усилитель, первый интегратор и второй умножитель, второй вход которого соединен с выходом объекта регулирования, вторым входом первого умножтеля и вторым входом блока сравнения а входы объекта регулирования и эталонной модели объединены, отличающаяся тем, что, с целью увеличения точности системы, она содержит последовательно соединенные блок задержки, третий умножитель, второй усилитель, второй интегратор, четвертый умножитель, сумматор, выхо которого соединен со вторам входом объекта регулирования, а вход - с выходом четвертого умножителя, первый вход третьего умножителя соедине со вторым входом четвертого умножителя, а второй вход - с выходом блока сравнения.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР 327448, кл. G 05 В 15/00, 1970.
2.Авторское свидетельство СССР 328433, кл. q 05 В 15/00, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся следящая система | 1983 |
|
SU1167583A1 |
| Самонастраивающаяся система для регулирования объектов с запаздыванием | 1984 |
|
SU1236422A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ НЕЙТРАЛЬНОГО ТИПА С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2003 |
|
RU2246123C1 |
| АДАПТИВНАЯ СИСТЕМА СЛЕЖЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО СОСТОЯНИЮ И УПРАВЛЕНИЮ | 2005 |
|
RU2294004C1 |
| АДАПТИВНАЯ СИСТЕМА СЛЕЖЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО СОСТОЯНИЮ, УПРАВЛЕНИЮ И НЕЙТРАЛЬНОГО ТИПА | 2011 |
|
RU2460111C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ НЕЙТРАЛЬНОГО ТИПА | 1998 |
|
RU2148269C1 |
| Интерполирующий фильтр | 1985 |
|
SU1241421A2 |
| АДАПТИВНАЯ СИСТЕМА СЛЕЖЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2005 |
|
RU2294005C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ЭТАЛОННЫМ УПРЕДИТЕЛЕМ ДЛЯ ОБЪЕКТОВ С НЕСКОЛЬКИМИ ЗАПАЗДЫВАНИЯМИ | 2009 |
|
RU2397531C1 |